







GNSS说第(七)讲—自适应动态导航定位(六)—导航解算中的误差探测、诊断与修复
概述
一般性描述
动态导航定位误差的探测、诊断与调整是高精度导航定位必须解决的问题。它要求实时监测导航系统中的动力学(或运动学)模型。Teunissen( 1990a,b)提出了实时递推探测(Detection),诊断(Identification)和修复或调整(Adaptation)(即DIA)方法。该方法基于多传感器整体导航概念,并充分利用冗余观测信息和动力学模型信息。中国学者对Kalman滤波模型误差的识别及探测也做了研究(陶本藻,1999;何海波,杨元喜,1999;杨元喜,2005b.2006a)。
众所周知,最小均方误差(Minimum Mean Squared Error)导航滤波理论将生成具有良好统计特性的最优解﹐其解具有无偏性和方差最小性(Teunissen,1990a)。然而,只有当所有的函数模型和随机模型的先验精度均满足条件时,最小方差滤波解才能具有这些优良性质。实践中,函数模型经常出现偏差,如异常误差﹑传感器失误或状态偏差等,这些均会使滤波解出现偏差,从而基于正常假设而得出的结论失去意义。于是自动监测预设模型的完整性变得十分重要。Teunis-sen等发展了一种适用于动态系统模型监测的理论和方法,其理论可看成是静态质量控制的扩展,相应的检验过程为递推过程,并与标准的导航滤波并行计算,达到实时监测的目的。
递推DIA方法由三部分组成,即:①探测;2诊断;3修正。
所谓探测实际是检验数学模型的整体有效性。为实际应用方便,人们又将模型的有效性分为局部有效和整体有效。为此,可将模型误差的探测区分为局部误差(如粗差)探测或整体误差(如系统误差或软件失误)探测。
而模型误差的诊断也包括两部分,即在所有的备选假设中寻找最可能的模型误差,然后再诊断模型发生误差的最可能的时间。模型误差诊断过程中,又将区分单个误差和多维误差情形。对于多维模型误差情形,将采用回代方式以便诊断最可能的模型误差的数量。与探测过程类似,诊断也分局部诊断和整体诊断。整体诊断的统计量基于移动窗口(Moving Window),以减少计算负担和诊断的时间延迟。其中移动窗口采用有限窗口并根据时间进程决定。
模型调整过程紧随诊断过程,其目的是修正滤波状态偏差。严格地进行模型偏差修正应从模型发生偏差时开始,其中包括平滑过程。为了减少计算负担,实践中只需从探测阶段开始,向前进行修正,对于历史信息不再处理。
滤波及其统计量
为构造实时模型误差检验统计量,这里仍基于标准的离散滤波公式。
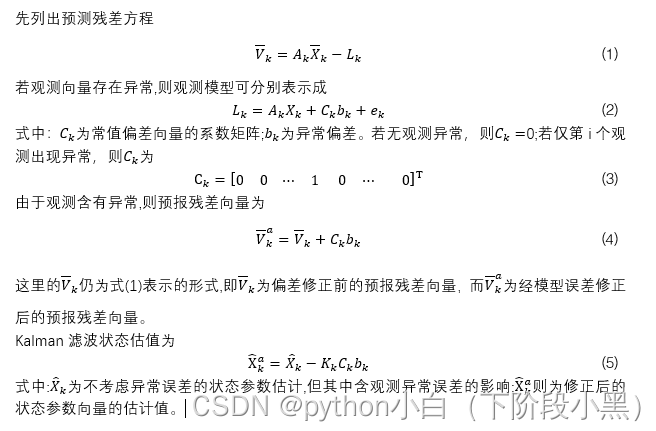
在模型检验过程中,预测残差起着非常重要的作用。预测残差定义为实际的系统输出与基于预测状态的系统输出之差,即
基于Kalman滤波的先验假设﹐观测误差服从正态分布,则预测残差也服从零期塑的正态分布,其协方关矩阵为
误差探测
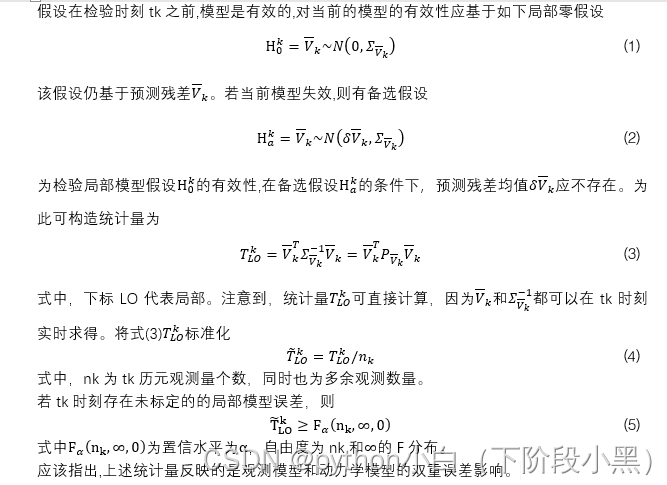
局部误差检验与探测
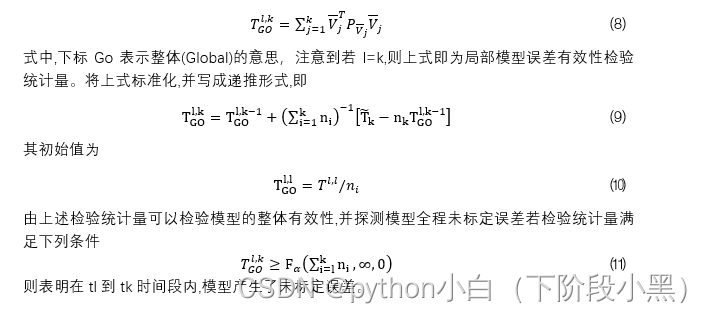
模型的整体误差检验与探测
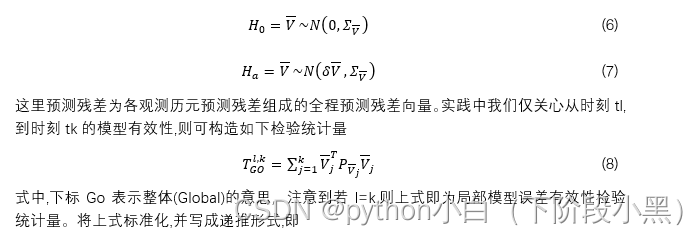
上述局部模型的有效性检验统计量对模型的整体误差不十分敏感。一些随时间缓慢积累的模型误差,很容易通过局部统计检验量。为检验模型的整体有效性,可构造如下假设检验
误差诊断
模型误差诊断也可分为局部模型误差诊断,整体模型误差诊断。而局部模型误差诊断又分为单个误差诊断和多维误差诊断。
局部模型误差诊断
在导航系统的质量控制中,实时地发现异常只是质量控制的第一步,而真正诊断误差发生的位置、时刻、原因、量级则是质量控制中十分棘手的问题。这不仅仅是一个统计量构造问题﹐而更多依赖于导航工作者的经验及对导航系统的了解程度。下面仅讨论观测异常的诊断问题,至于模型异常的诊断要更复杂一些。
模型修复
当然上述模型修正的基础是模型误差的探测和诊断是正确的,且模型误差的估计是可靠的。离开任何一个前提,上述对导航模型的修正估计都是不可靠的。
动态Kalman滤波模型误差的影响
动态Kalman滤波的模型误差包括观测模型误差、动力学模型误差,以及先验随机信息的误差。由于各类模型误差的性质不同,其误差的影响也不相同,相应地,误差的识别与影响控制方式也不相同。观测模型误差的影响及其识别与静态平差模型误差的影响与识别方式大体相同,于是得到了广泛研究,如前面介绍的Kalman滤波并行操作的误差探测、诊断与修复(DIA)法,Kalman 滤波的模型误差辨识问题(陶本藻,1999),针对粗差的自适应Kalman滤波等。
本节主要讨论各类模型异常误差的影响问题,包括观测异常误差影响和动力学模型异常的影响。分别讨论了观测异常误差和动力学模型异常误差对当前历元滤波结果的影响及对后续历元滤波结果的影响;构建了异常误差影响表达式,并对各类异常误差的检测方法进行了分析。
当前历元异常误差对Kalman滤波结果的影响
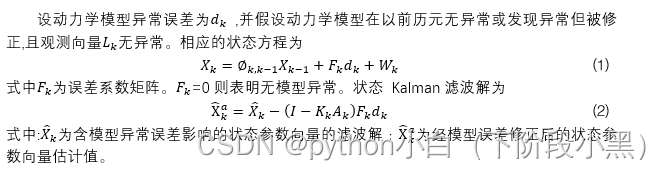
动力学模型异常误差对Kalman滤波结果的影响
简单分析
(1)异常观测误差对当前历元状态参数向量Kalman滤波的影响和对后续状态估计的影响不同,对前者的影响可以通过观测残差的数值体现,并可利用观测残差构造统计量进行检验,类似于Baarda的数据探测法。
(2〉异常观测误差对以后历元状态参数向量的影响主要通过动力学模型传递。它主要反映为预测状态误差﹑预测残差误差和状态估计误差。这种滞后影响很难通过异常检验进行可靠定位。
(3)动力模型异常误差主要体现为当前历元的预测残差向量误差、状态估计误差,但不单独体现在某个预测残差分量中。通过对改正数进行分析,可以基本判断模型异常误差主要体现在哪个状态分量上。
(4)异常观测误差和异常模型误差的影响分析为合理构造检验统计量,合理识别异常误差类型,合理控制异常误差的影响打下了基础。
Kalman滤波异常误差检测
动态Kalman滤波的误差检验与静态数据处理误差检验有明显差别。第一,动态滤波多余观测往往较少,有时不足以探测异常误差;第二,动态滤波对实时性要求往往较高,利用循环迭代检验很难满足实时性要求;第三,动态滤波结果往往含有观测误差和动力学模型误差的共同影响,于是,基于滤波解计算的残差分量往往不能可靠地确定相应随机量是否含有粗差。
针对动态导航观测异常和动态模型异常误差的影响,本节分别讨论了整体误差检验法、三种观测异常检测法和三种动力模型异常检测法,并对这几种异常检测法进行了简单分析。
观测异常与动力学模型异常整体检验
整体误差检验主要检验观测模型和动力学模型的整体误差量级,这种整体误差量级可以通过观测残差和状态预测向量残差的二次型体现,即

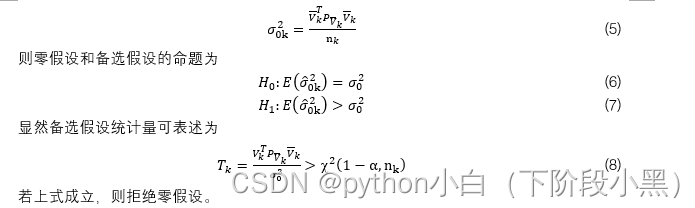
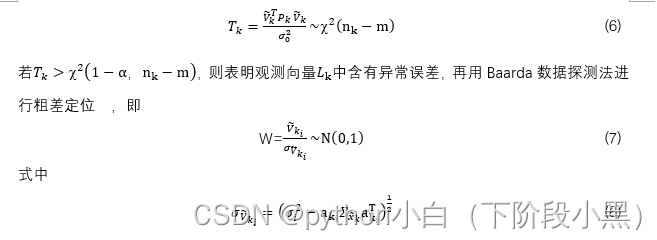
若接受H_0假设,则表明观测及动力学模型均无异常,即基于tk时刻的观测模型和动力学模型所进行的滤波解算结果是可靠的。但是,当H_0假设被拒绝后,情形则比较复杂。首先必须判断是观测向量L_k存在异常,还是动力学模型预测信息存在异常﹔确信异常类型后,还必须为异常误差定位。
观测异常检验
以模型为基准的观测异常检验
以当前历元可靠观测为基准的异常检验
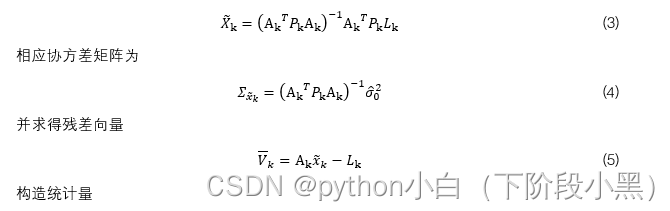
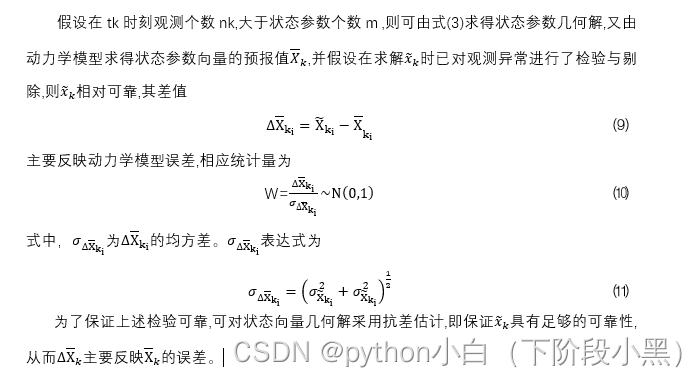
若在tk历元观测个数nk大于状态参数个数m,则在tk时刻可获得状态参数的估计
以状态Kalman滤波估值为基础的的观测异常检验

动力模型异常检验
动力学模型异常检验也可以从三个方面人手,即状态不符值比较法、基于整体状态滤波解检验法和模型误差整体检验法(杨元喜,2005b)。
状态不符值检验法
以状态参数Kalman滤波估值为基础的动力模型误差检验

以可靠观测为基础的动力模型误差整体检验
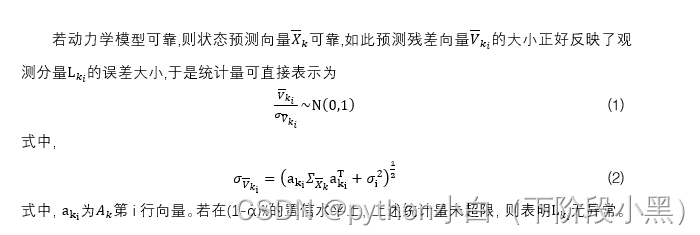
在特定的置信水平下,若拒绝上述检验,则表明动力学模型信息有异常,但这类检验并不能确定模型预测状态哪个分量有异常。实践中,我们一般不十分关心模型预测状态分量异常,而侧重模型信息整体是否有异常。若发现模型信息整体有异常,则可对模型误差作整体控制。















 726
726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











