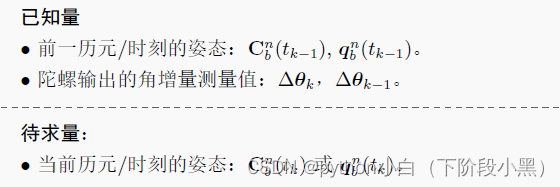
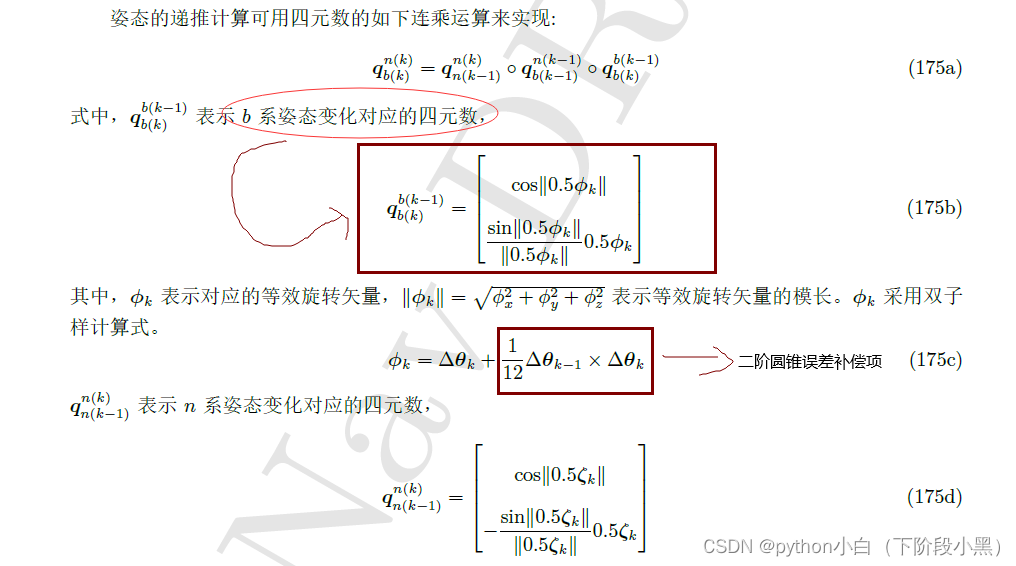
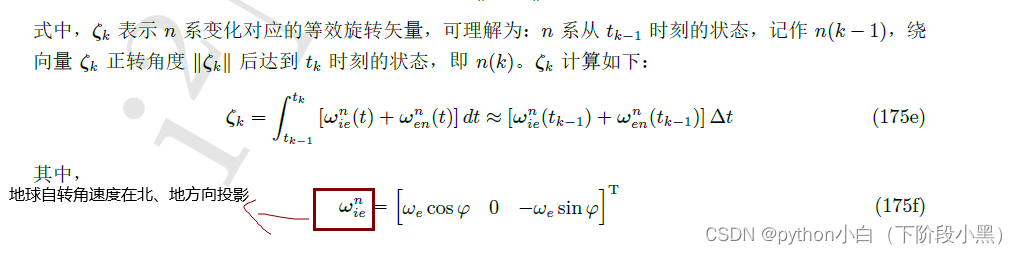
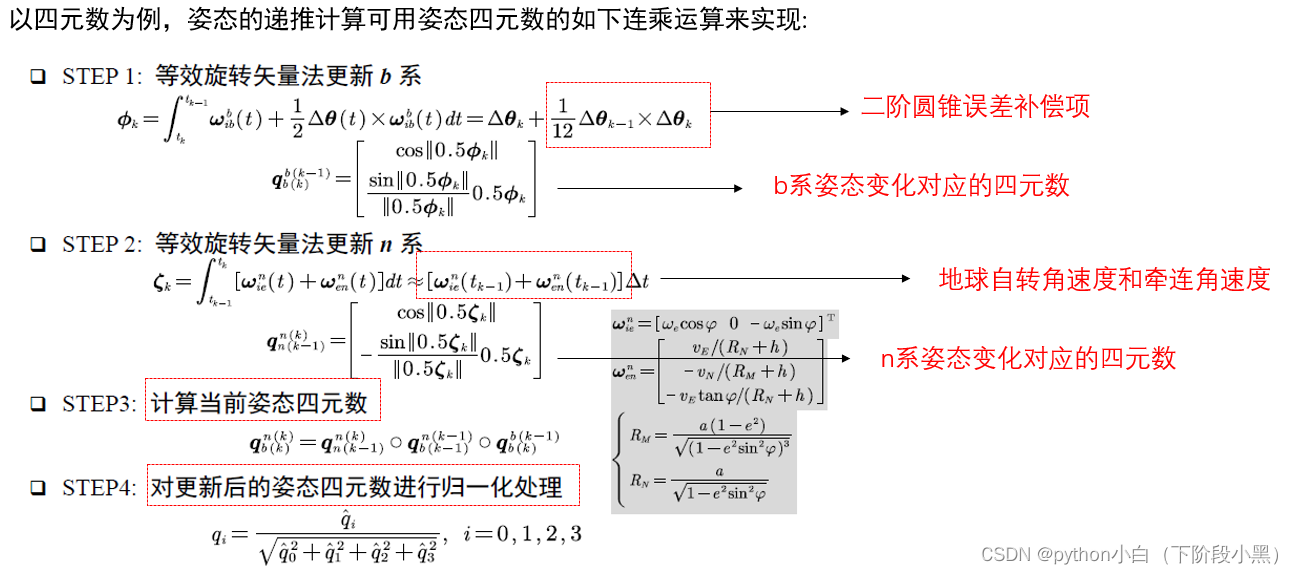
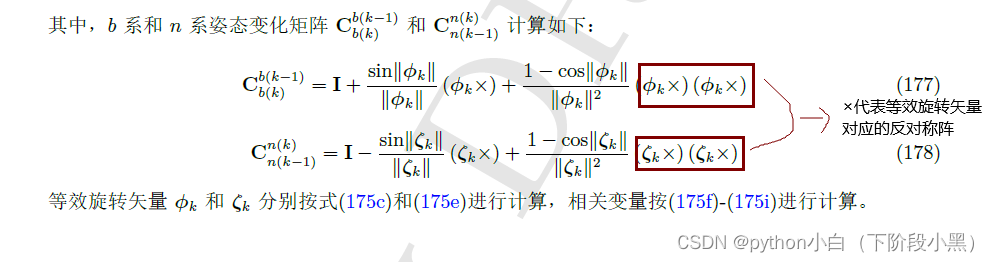
文章目录 姿态更新姿态更新定义姿态更新前提用四元数进行姿态更新计算用方向余弦矩阵进行姿态更新计算 姿态更新 姿态更新定义 所谓姿态更新算法就是根据前一时刻的姿态和陀螺输出的一个或多个测量值,计算当前时刻的姿态。姿态的递推计算可采用方向余弦矩阵或者四元数来实现,而姿态的变化我们则采用等效旋转矢量来表示。 姿态更新前提 用四元数进行姿态更新计算 总结起来就是如下四步: 用方向余弦矩阵进行姿态更新计算 当然,姿态更新也可使用方向余弦矩阵进行,用方向余弦矩阵来实现姿态的递推计算,跟四元数类似,可以通过如下连乘运算来实现





























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 7877
2217
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
7877
2217
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








