







前言
使用模糊PID时,需要对工具库进行配置,模糊PID是由2个输入个3个输出组成,输出是E和Ec,输出是Kp、Ki和Kd。打开matlab后,需要配置。
MATLAB模糊配置
1、在命令窗口输入fuzzy,打开模糊控制箱。
界面如图所示:

依次点击edit ->add Variable->input /output添加2个输入和三个输出。

添加完成之后,如图所示:

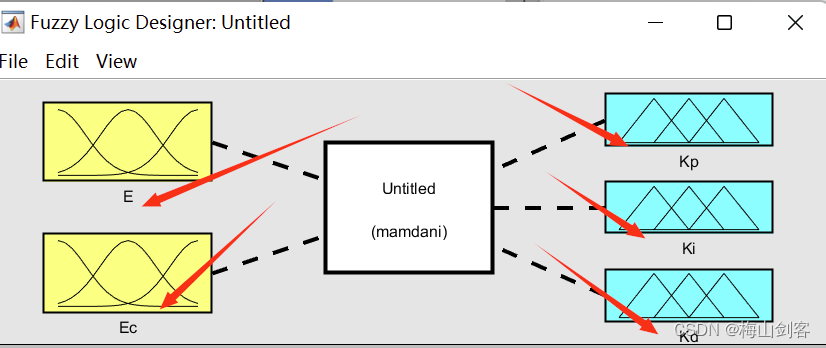
选择添加进入的输入和输出之后,在Name处修改名称。分别将输入修改为E、Ec,输出修改为Kp、Ki、Kd。
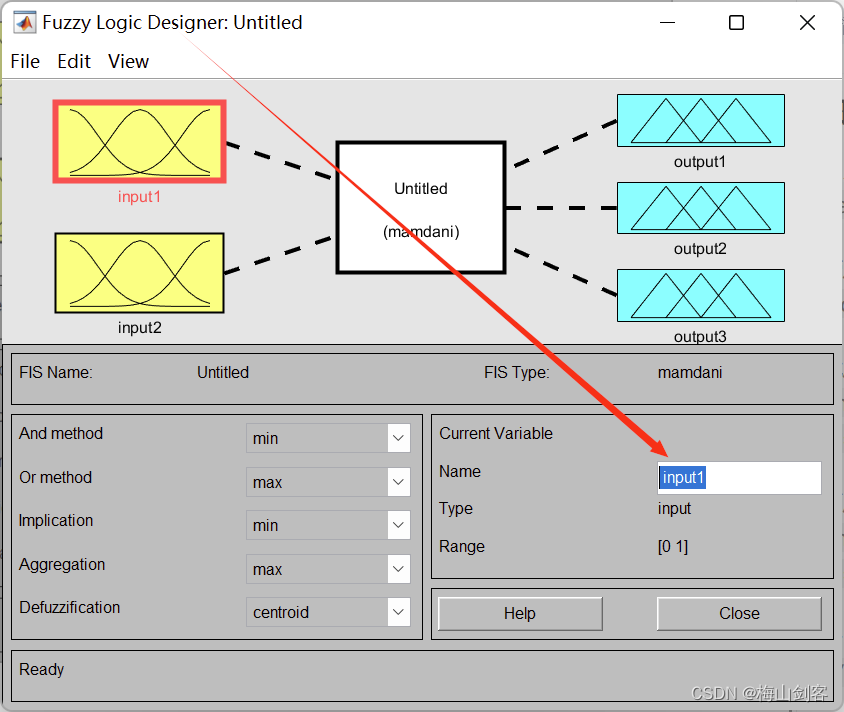
修改完成之后,如图所示:
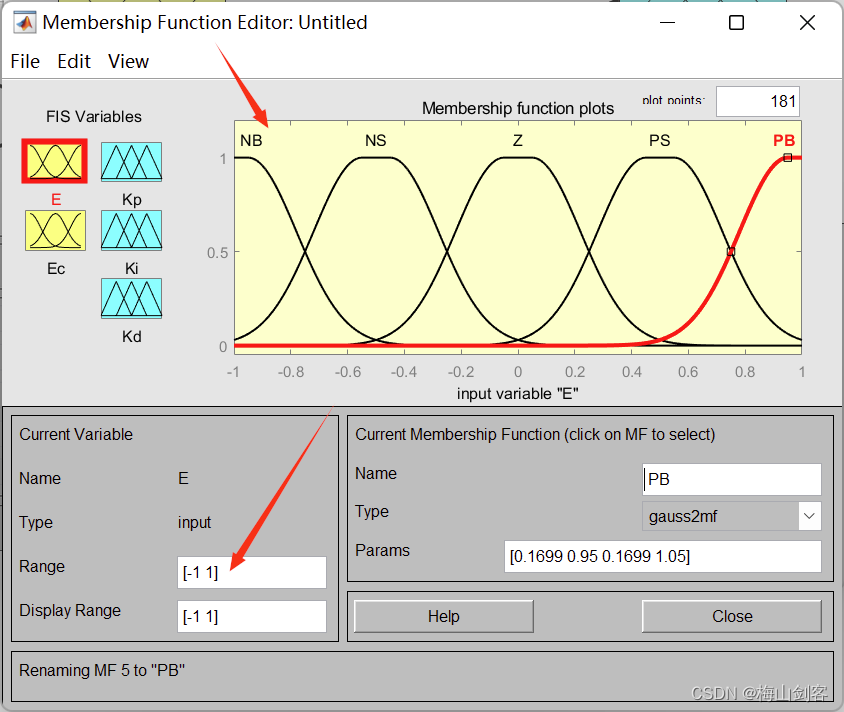
紧接着添加隶属函数,这里以输入E举例说明,这里输入选择高斯2函数,输出选择三角函数,双击输入的
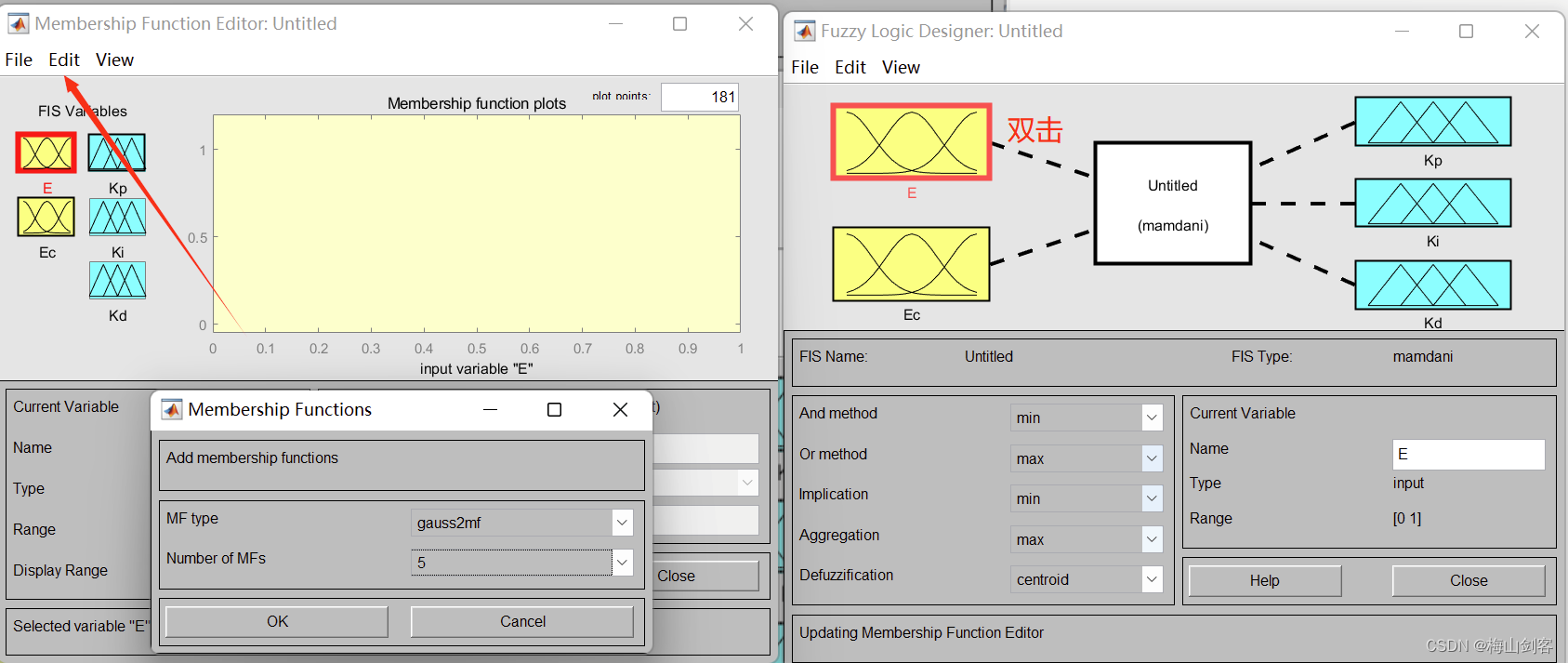
修改论域范围为-1 到+1,修改隶属度名称为NB、NS、Z、PS、PB,修改后如图所示:
修改完成之后,根据PID的规则表,添加控制规则。规则表如图所示:
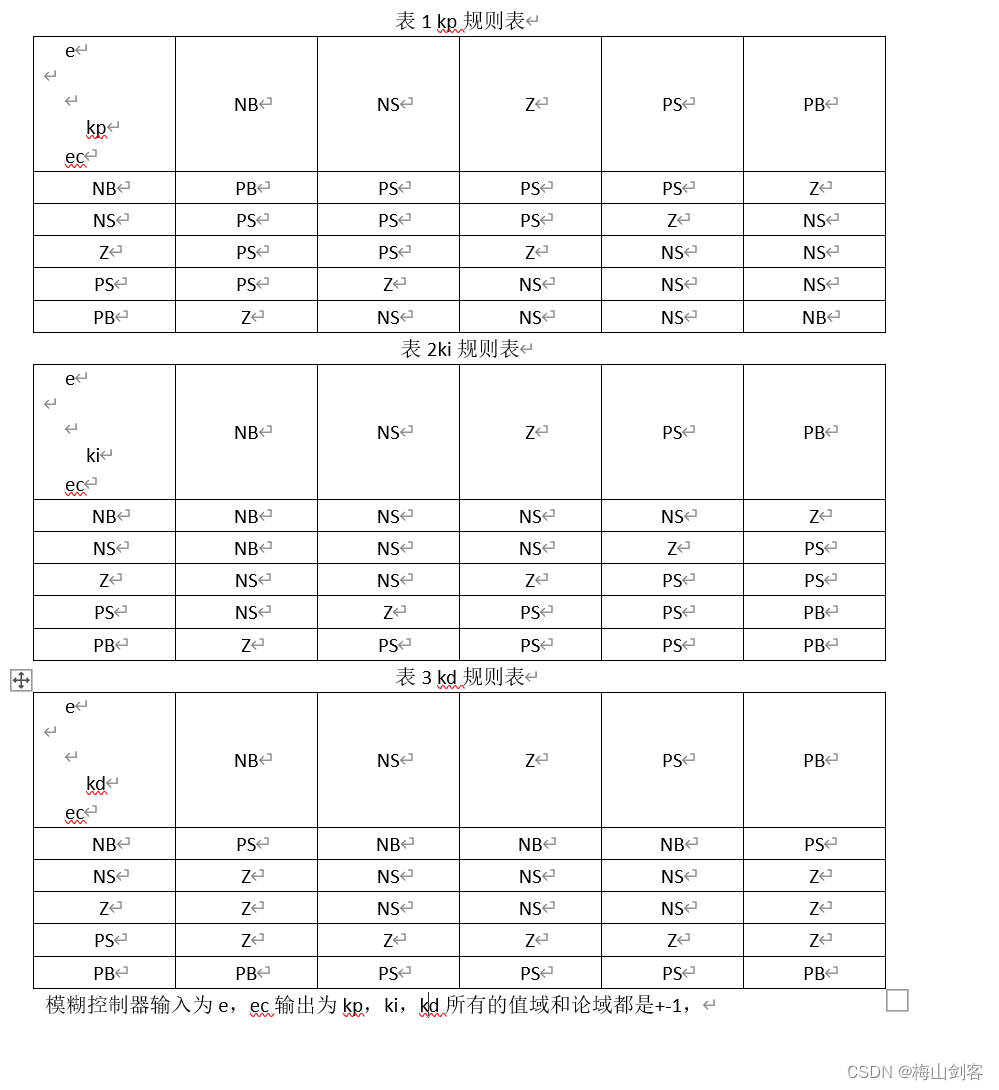
根据模糊规则表添加25条模糊控制规则:
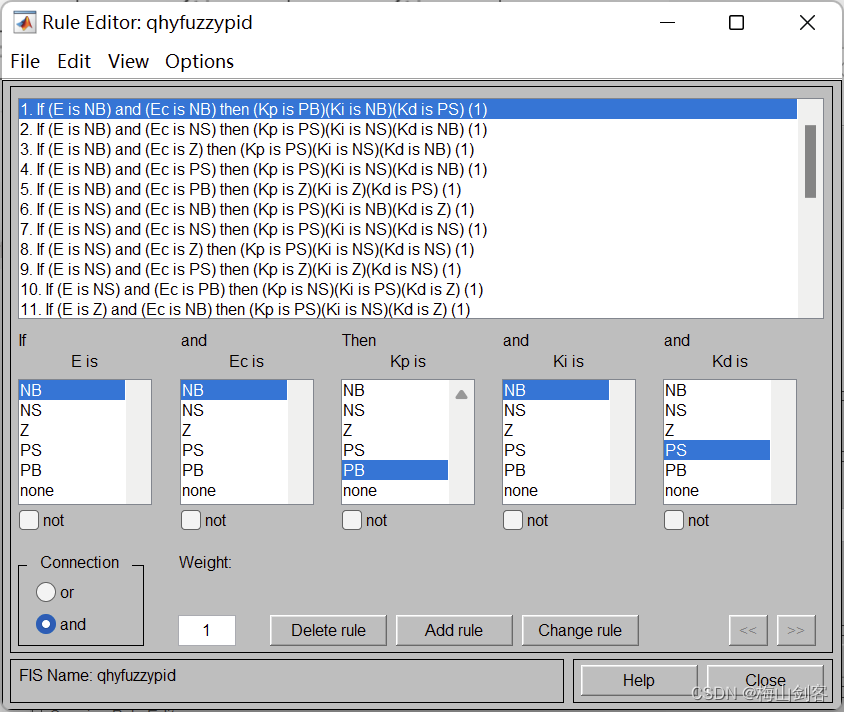
添加完成之后,保存xx.fis文件即可完成模糊控制器的配置,这样的.fis文件就可以添加到仿真控制器中了。
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









