







1. 回顾
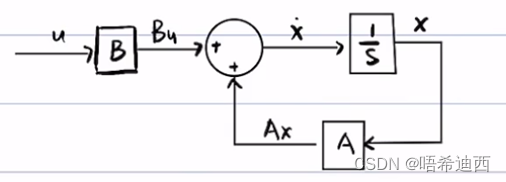
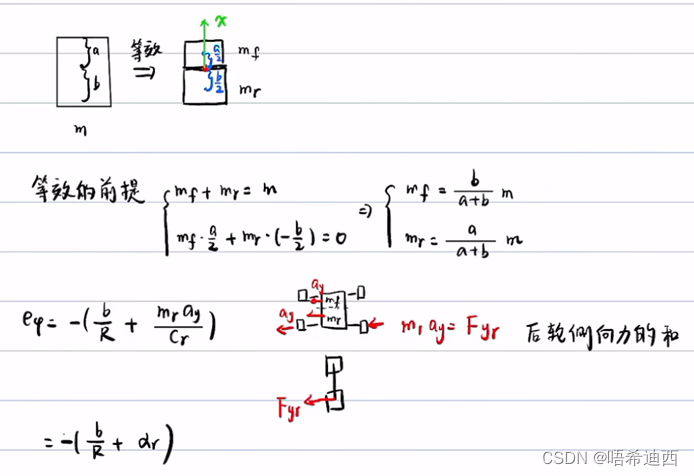
对于一个 系统而言,结构可以画作:
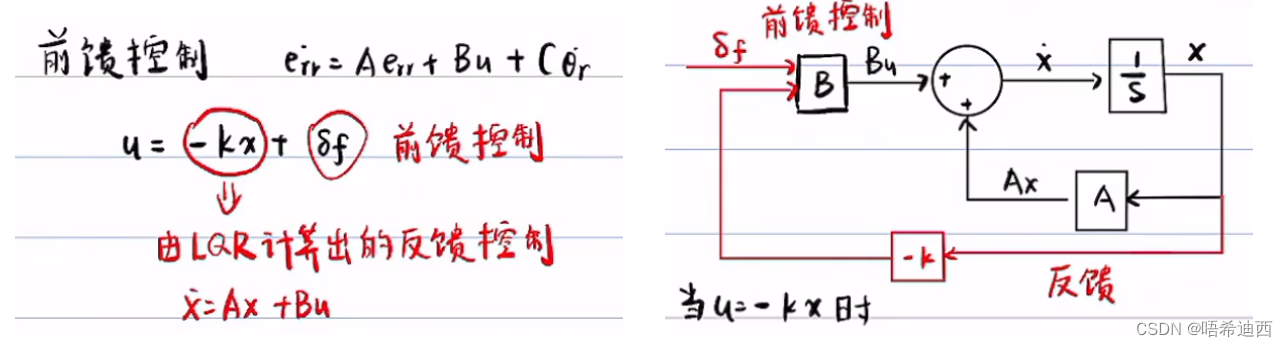
如果采用 这样的控制策略,结构可以画作:(这就是LQR控制)
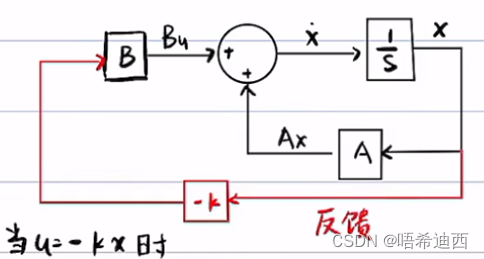
使用LQR控制器,可以通过公式 和
构建一个完美的负反馈系统;
a
a
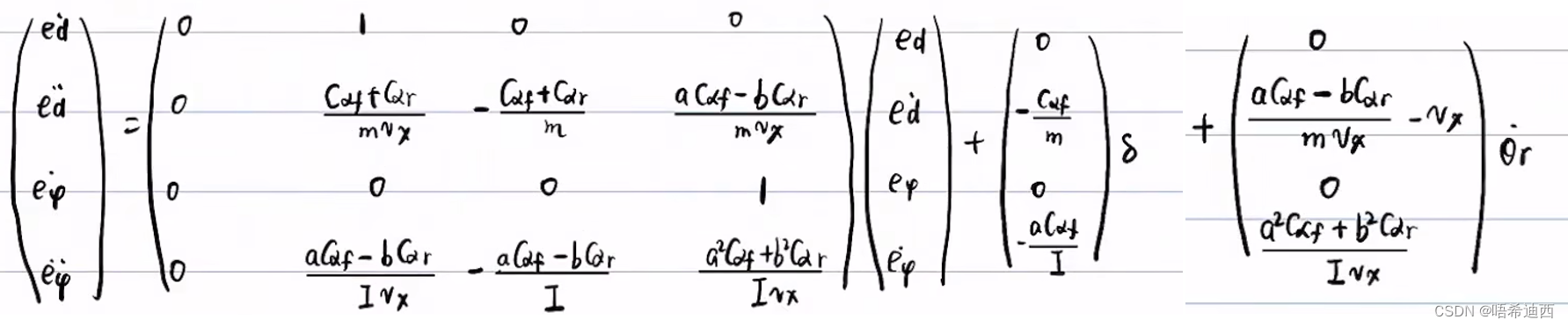
但是有上一个博客可知,我们的误差型车辆横向动力学方程,有三项,而非两项,这就意味着使用LQR控制器是不够控制我们的这个系统的,因为LQR只对前两项起调节作用;
我们的目的:
-
系统稳定,即
-
稳态误差为0 ,即
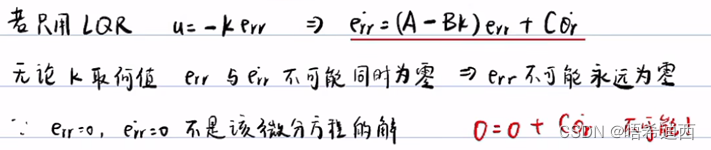
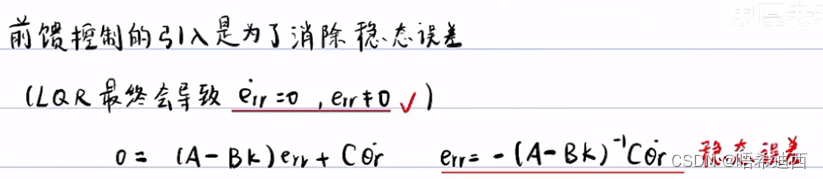
解释:如果只用【LQR + 反馈】来控制该系统
- 无法实现两者同时为0,因为稳态误差是由小尾巴
带来的,如果只是 LQR 的话那么可以指定 K 矩阵满足
即可使得系统
稳定且稳态误差为0,但是不管 K 如何取值都无法满足系统
稳定且稳态误差为0;
a
a
本博客主讲:解决LQR中的小尾巴
![]()
a
a
a
a
a
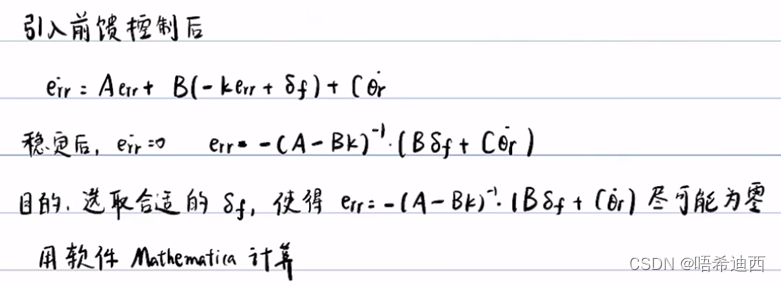
2. 引入前馈控制 -- 解决第三项
Step1:
a
a
Step2:现在系统已经稳定了,接下来我们的目的是令稳态误差也为0:
a
a
Step3:令横向误差 为0
a
a
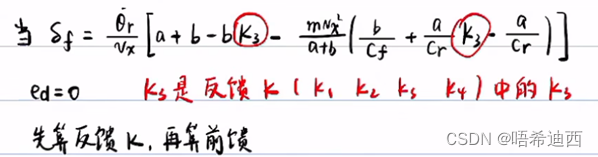
Step4:令(假)航向误差 为0
的公式中只有
的值是受我们控制的,但是如果通过指定
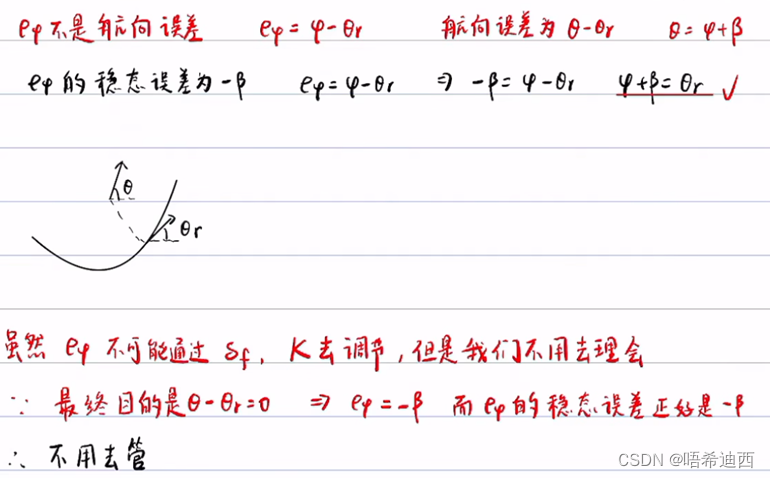
- 我们这样想,本身航向误差其实是
,我们追求的目标其实是这个公式为0,所以
,所以我们需要的是

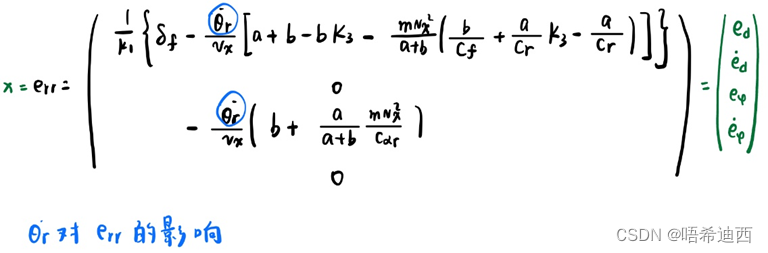
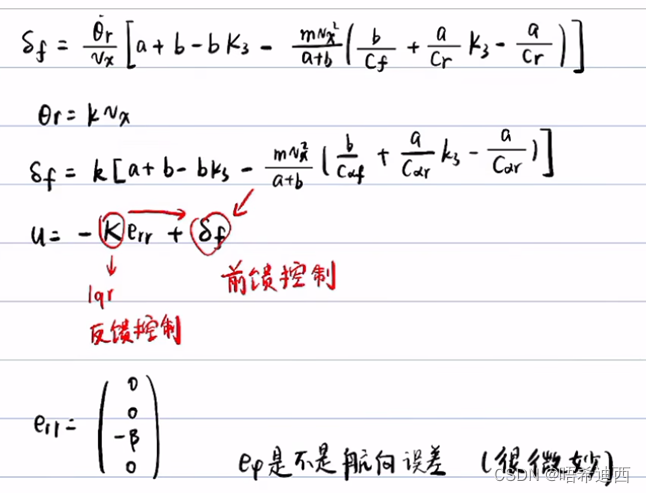
综上:
则有:
![]()
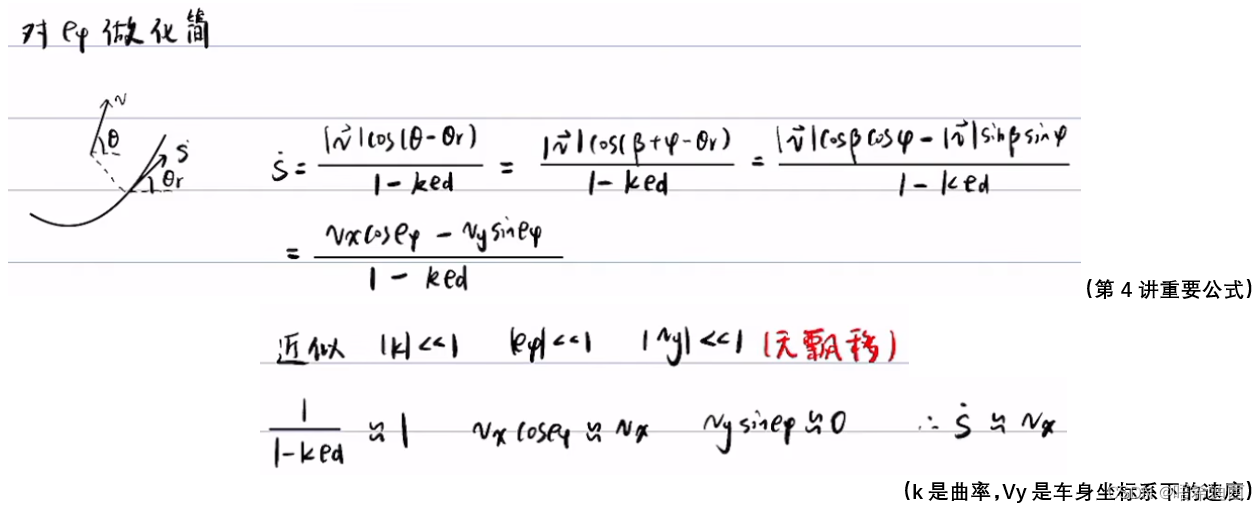
这里出现了一个 may,应该是整个车身受到的侧向力 F,但是这个 F/Cr 就什么都不是了,Cr 只是后轮的侧偏刚度,整车收到的侧向力 / 后轮的侧偏刚度,这啥都不是,所以需要继续化简,所幸这里的![]() 给我们提供了化简思路;
给我们提供了化简思路;
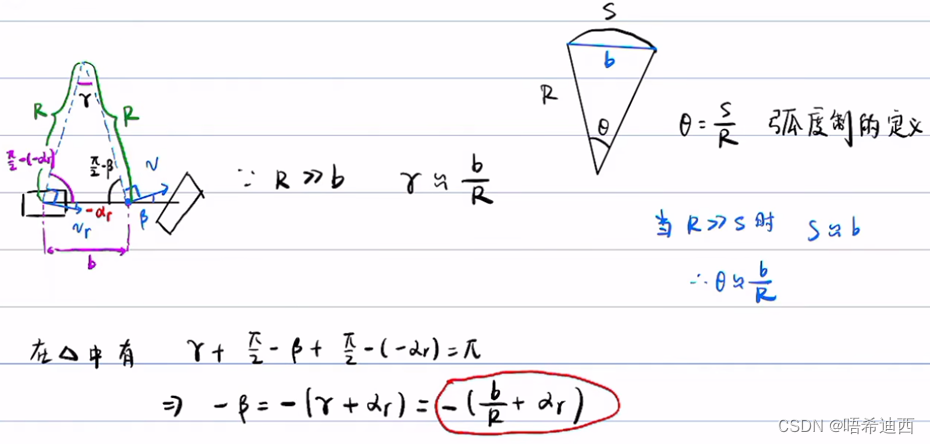
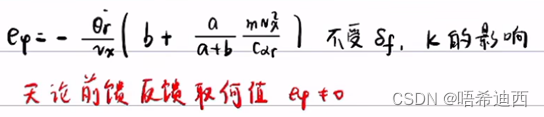
则有: 符合我们期待的结果(因为
并不是真正的航向误差)
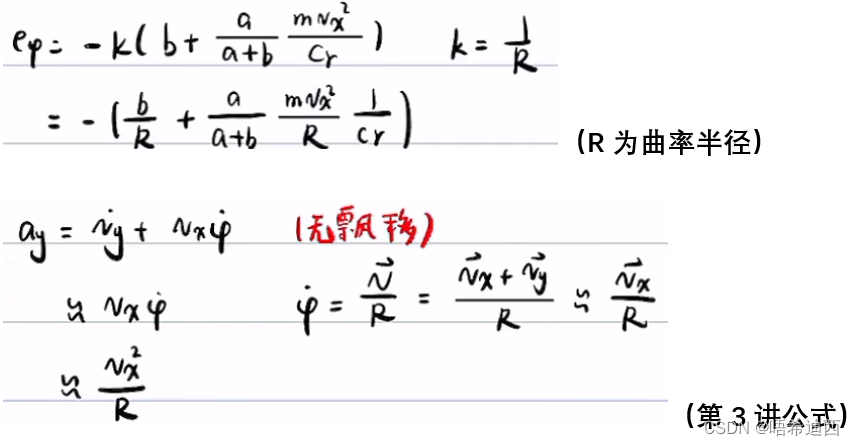
因此对于下面这个公式,只需要管第一项就可以了,因为后面三项都达到了我们期待的标准
即:
a
a
总结:
-
计算 K:通过 LQR 中的 Riccati 方程获得
-
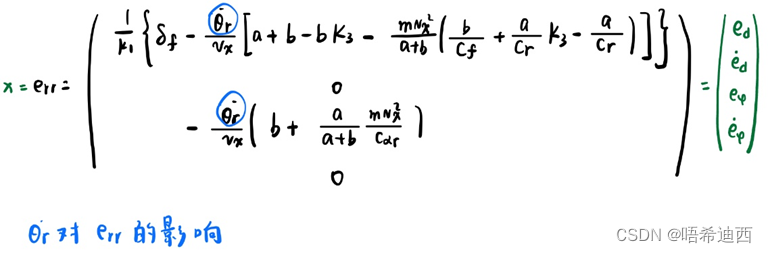
计算
:通过下面的公式计算



















 386
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









