






基于MPC/模型预测控制的轨迹跟随,横向控制模型,车道保持,simulink模型
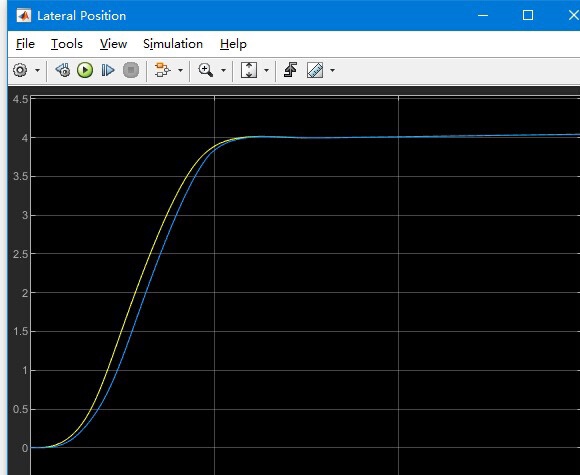
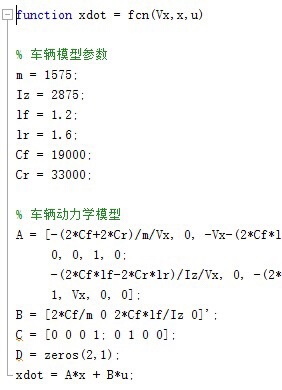
采用二自由度车辆动力学模型,可以自定义车辆参数,自定义目标轨迹,图中为单移线目标轨迹与实际轨迹偏差
ID:6350672318493560
多不多啦米

基于MPC模型预测控制的轨迹跟随技术是一种高级驾驶辅助系统,可以使车辆在行驶过程中更加精确地跟随预设的目标轨迹。在该技术中,横向控制模型是关键的组成部分,用于维持车辆在行驶过程中的横向稳定性。此外,车道保持功能还可以通过MPC模型预测控制的方法实现。
MPC模型预测控制技术基于二自由度车辆动力学模型,这种模型考虑了车辆的纵向和横向动态特性。通过自定义车辆参数,可以根据不同车型的特点进行灵活的调整。此外,还可以根据实际需求自定义目标轨迹,以实现更加精准的轨迹跟随效果。
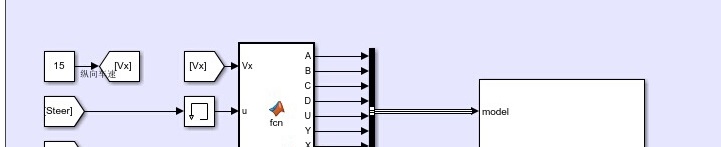
在实际应用中,MPC模型预测控制的轨迹跟随技术可以通过Simulink模型进行仿真和验证。Simulink是一款功能强大的工具,可以实现系统建模和仿真。在MPC模型预测控制技术中,Simulink模型可以帮助开发人员快速验证和优化算法,以实现更好的轨迹跟随效果。
图中展示了单移线目标轨迹与实际轨迹之间的偏差。在MPC模型预测控制技术中,通过不断调整车辆的控制输入,使得实际轨迹与目标轨迹尽可能接近。可以通过优化控制算法,减小偏差,提高轨迹跟随的精度和稳定性。
总之,基于MPC模型预测控制的轨迹跟随技术是一种高级驾驶辅助系统,可以帮助车辆实现精确的轨迹跟随。通过横向控制模型和车道保持功能,可以维持车辆的横向稳定性和车道偏离的抑制。Simulink模型则提供了仿真和验证的平台,用于快速验证和优化算法。通过不断优化控制算法,可以实现更好的轨迹跟随效果,提高驾驶的安全性和舒适性。
以上相关代码,程序地址:http://matup.cn/672318493560.html















 926
926











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









