







一、前言
我们知道osg使用的是右手系。
其坐标轴定义为:
X轴:向右(Right)、Y轴:向上(Up)、Z轴:向前(Forward)。
欧拉角的定义为:
Heading(航向角)绕 Y轴 旋转。控制物体的 左右转向(如飞机绕垂直轴旋转)。
Pitch(俯仰角)绕 X轴 旋转。控制物体的 上下俯仰(如飞机抬头或低头)。
Roll(翻滚角)绕 Z轴 旋转。控制物体的 左右翻滚(如飞机绕机身纵轴旋转)。
而osgEarth 基于 OpenSceneGraph(OSG),但在地理空间中扩展了地理坐标系(如 WGS84)。其默认本地坐标系通常使用 ENU(东-北-天)坐标系。
其坐标系定义为:
X轴:正东方向(East)、Y轴:正北方向(North)、Z轴:垂直向上(Up,天顶方向)。
虽然都是用了右手坐标系,但是坐标轴的朝向发生的变化。如下图所示:
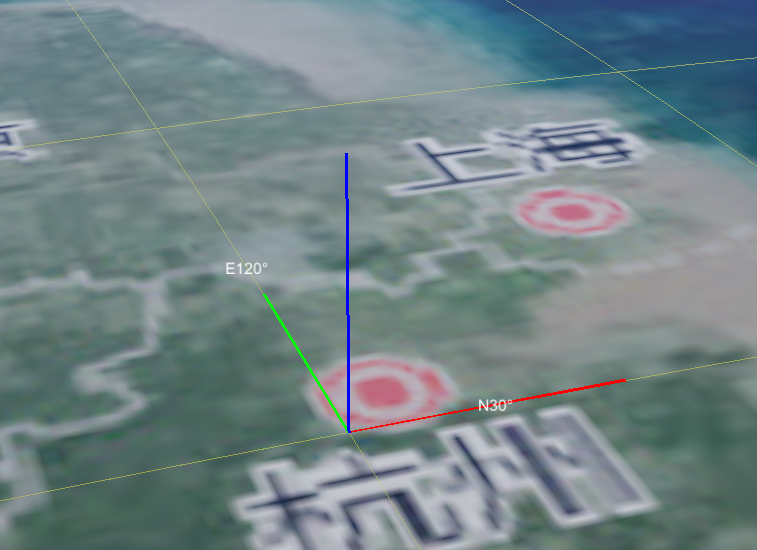
x轴朝右,y指向正北,z轴垂直于地面,这里使用默认的ENU(东北天)坐标系。
osgearth的欧拉角定义为:
Heading(航向角),绕 Z轴(垂直向上)旋转。
Pitch(俯仰角),绕 X轴(东方向)旋转。
Roll(翻滚角),绕 Y轴(北方向)旋转。
二、关键代码
有了以上的了解,设置一个物体的旋转直接使用内置的接口就好:
//1)构建旋转矩阵
osg::Matrix rotationMatrix;
rotationMatrix.makeRotate(
osg::inDegrees(m_stRotation.dPitch), osg::Vec3d(1, 0, 0),
osg::inDegrees(m_stRotation.dRoll), osg::Vec3d(0, 1, 0),
osg::inDegrees(m_stRotation.dHeading), osg::Vec3d(0, 0, 1));
//2)应用到节点
osg::ref_ptr<osg::MatrixTransform> mt = new osg::MatrixTransform;
mt->setMatrix(rotationMatrix);
//3)添加到自己的节点
mt->addChild(xxxx);//自己的节点
注意顺序是以x轴、y轴、z轴的顺序,而不是heading、pitch、roll的顺序,这里不得不吐槽一下源码命名的随意性,说好的见名知意呢?让不熟悉的人使用这个接口,传值的顺序只能靠去猜了...
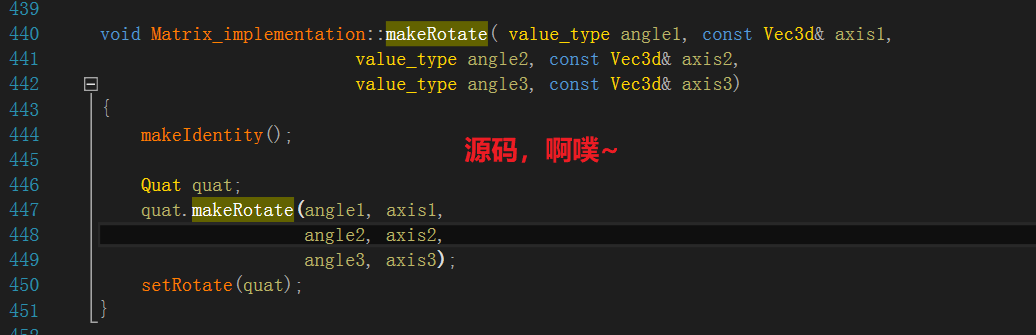
我直接上来就是heading、pitch、roll的顺序,错的找不到北(:0
三、效果
最后附上画局部坐标之后的代码
//创建坐标轴
osg::ref_ptr<osg::MatrixTransform> static CreateDebugAxis(double lngD, double latD, double height, double length = 1000000)
{
osg::EllipsoidModel ellipsoid;
// 计算ENU到世界坐标的变换矩阵
osg::Matrixd localToWorld;
ellipsoid.computeLocalToWorldTransformFromLatLongHeight(osg::inDegrees(latD), osg::inDegrees(lngD), height, localToWorld);
// 创建变换节点并设置矩阵
osg::ref_ptr<osg::MatrixTransform> mt = new osg::MatrixTransform;
mt->setMatrix(localToWorld);
mt->addChild(WHRadar::Util::GetDebugLine(osg::Vec3(0.0, 0.0, 0.0), osg::Vec3(length, 0.0, 0.0), osg::Vec4(255.0, 0.0, 0.0, 255.0)));
mt->addChild(WHRadar::Util::GetDebugLine(osg::Vec3(0.0, 0.0, 0.0), osg::Vec3(0.0, length, 0.0), osg::Vec4(0.0, 255.0, 0.0, 255.0)));
mt->addChild(WHRadar::Util::GetDebugLine(osg::Vec3(0.0, 0.0, 0.0), osg::Vec3(0.0, 0.0, length), osg::Vec4(0.0, 0.0, 255.0, 255.0)));
return mt;
}
//获取调试线
osg::ref_ptr<osg::Geode> static GetDebugLine(osg::Vec3 point1, osg::Vec3 point2, osg::Vec4 color = osg::Vec4(255.0f, 0.0f, 0.0f, 1.0f))
{
osg::ref_ptr<osg::Geode> geode = new osg::Geode();
osg::ref_ptr<osg::Geometry> geometry = new osg::Geometry();
osg::ref_ptr<osg::Vec3Array> points = new osg::Vec3Array();
points->push_back(point1);
points->push_back(point2);
geometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::LINES, 0, 2));
geometry->setVertexArray(points);
osg::ref_ptr<osg::Vec4Array> colors = new osg::Vec4Array;
colors->push_back(color);
colors->push_back(color);
geometry->setColorArray(colors, osg::Array::BIND_PER_VERTEX);
geometry->getOrCreateStateSet()->setAttribute(new osg::LineWidth(1.0), osg::StateAttribute::ON);
geode->addDrawable(geometry.get());
return geode;
}
//添加到场景
m_pRoot->addChild(WHRadar::Util::CreateDebugAxis(105, 35, 32000));
原创不易,记得点赞加关注哦,我会持续分享实用的功能(:-



















 3672
3672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











