






一.引言
1.1 尾流效应
大型风电场中前排风机的尾流速度亏损以及尾流区湍流强度的增加会导 致后排风机的功率输出降低并增大叶片的疲劳载荷,这种现象被称作“尾流效应”。
受到环境、场地等因素的影响,风电场中尾流损失现象十分显著。为了减少尾流效应所带来的风电场功率损失,需要通过优化算法对指定区域风电场的风机位置进行布局优化。
1.2 尾流模型
现有的尾流计算模型主要分为两类:解析尾流模型(analytical wake model)和计算尾流模型(computational wake model)。前者是基于理想化的假设或实验数据拟合而得到的半经验风机尾流区域速度分布的数学表达式;后者则使用完整的计算流体力学分析方法求解 N-S 方程来更为准确地描述风机尾流场的流动。
解析尾流模型由于其形式简单,计算速度快并且具有能够满足工程精度要求的特点而作为风电场发电量的快速预报方法被广泛应用于风电场模拟和实际的风电场微观选址研究中。常见的解析尾流模型包含 Jensen 尾流模型、 Frandsen 尾流模型、Bastankhah 尾流模型、Larsen 尾流模型等,本文主要介绍Jensen尾流模型。
二.Jensen单尾流模型
Jensen单机尾流模型图示如下:
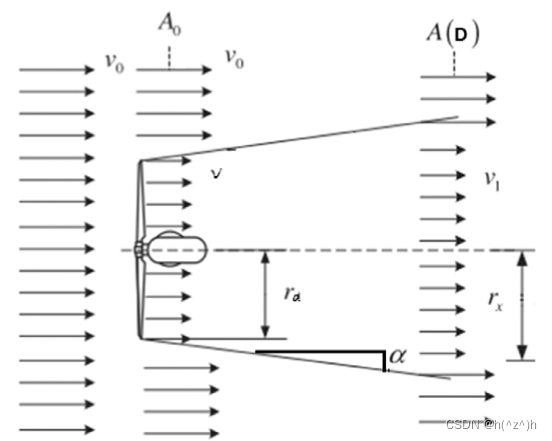
可见尾流以固定扩散系数沿风机转子两侧扩散。通过以下表达式计算风经过风力机风轮时在气流中产生风速衰减后的风速:
其中,为风机转子半径,
为原始风速,
,
为尾流扩散系数,
为下游风机与上游风机在风向上的投影距离,
为推力系数。
三.Jensen多重尾流模型
Jensen多重尾流模型,即考虑下游风机可能受上游多台风机的尾流影响,图示如下:
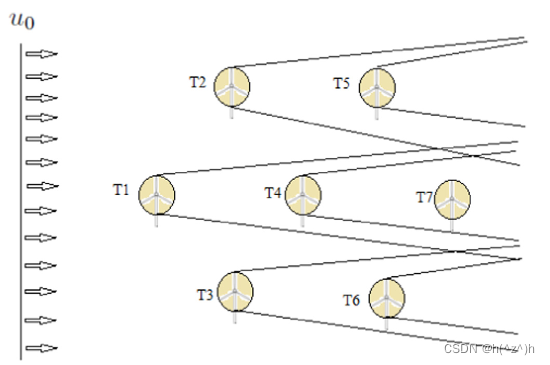
如图中风机T7同时受T1、T4风机的尾流影响。多机尾流影响有多种计算方式,包括 1)几何和;2)线性和;3)能量平衡;4)平方和。通常采用平方和的形式进行叠加。下游风速可计算如下:
其中,、
,
是风机所有可能的位置,
为风机
对风机
的尾流影响因子(暂考虑尾流完全重叠的情况):
四.考虑尾流部分重叠的阴影模型
存在上游风机尾流仅影响下游部分风机的情况,如下图所示:
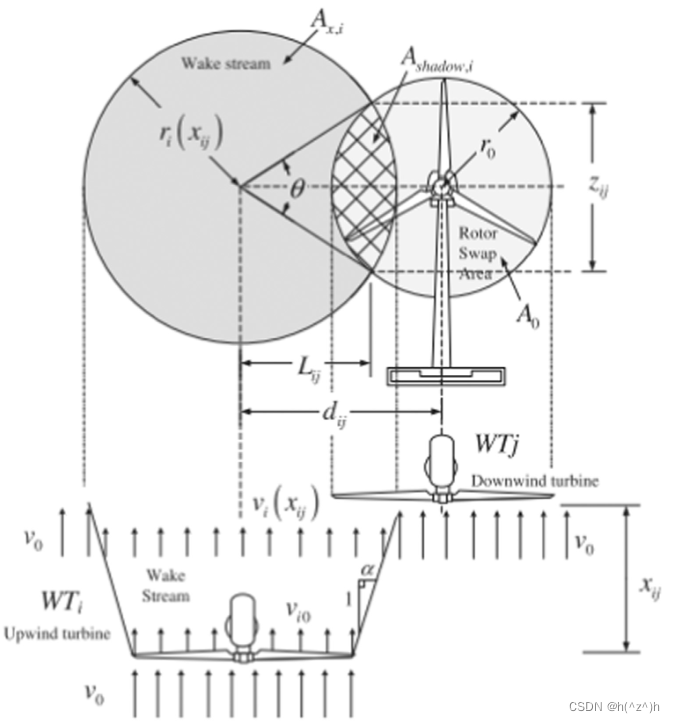
考虑重叠阴影面积后,尾流影响因子综合修正为以下形式:
①当 或
时,
;
②当 且
时,
;
③当 且
时,
;
为风机转子扫过的面积,
计算公式如下:
;
其中,是上游风力涡轮机后
处的尾流半径,
是下游涡轮机中心与尾流效应中心之间的距离,
是尾流区域与风机转子旋转范围交汇点到尾流效应中心的距离,
是尾流区域与风机转子旋转范围两交汇点之间的距离。
——end——


















 265
265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











