







 超级会员免费看
超级会员免费看

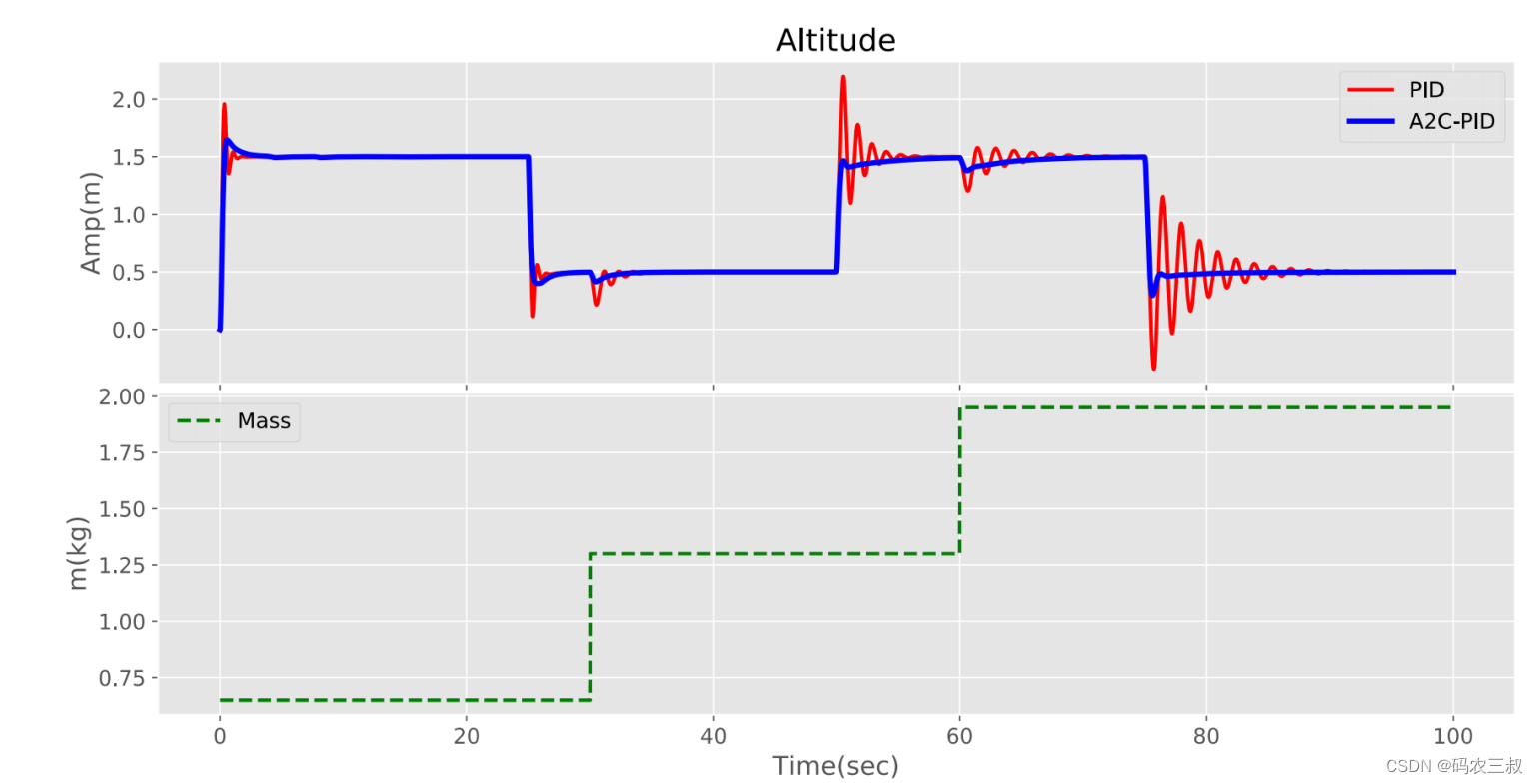
8.6.2 质量不确定性
在下一步中,我们改变了四轴飞行器的总质量(如图8-22所示),以执行参数不确定性并挑战网络的效率。系统的质量在短时间内发生显著变化。当系统质量增加时,系统的高度发生变化,这表明相应的控制器应该适应这些变化。根据图8-22所示,控制器能够相应地补偿系统的误差。与传统PID相比,很明显,在面对质量不确定性时,所提出的控制器的性能更好。此外,如果我们增加更多的质量,传统的PID方法将不会表现良好,因为其增益是为具有不同质量的系统设计的。另一方面,所提出的方法可以同时改变增益,从而防止误差变大。因此,这种方法不仅在线,而且适应变化。在图8-22中,绿线显示了四轴飞行器总质量的变化。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 850
850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











