






MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学 动力学
YID:1719755569927699
在无尽黄昏中消失的你

标题:MATLAB并联机器人Stewart平台的pid控制仿真与分析
摘要:本文通过MATLAB软件中的Simulink和Simscape工具箱,以并联机器人Stewart平台为研究对象,探讨了pid控制算法在该平台上的应用。首先,介绍了Stewart平台的结构和工作原理,以及pid控制算法的基本原理。然后,通过Simulink建立了Stewart平台的动力学仿真模型,利用pid控制器对平台进行运动控制,分析了不同pid参数对系统性能的影响。最后,通过实验结果验证了pid控制算法对Stewart平台的优化效果,并提出了进一步优化的方向。
-
引言
并联机器人Stewart平台具有高刚度、高精度和高稳定性等优势,在飞行模拟器、医疗设备和工业自动化等领域得到广泛应用。pid控制算法作为一种经典的控制算法,具有简单实用、参数调节方便等特点,被广泛应用于控制系统中。本文旨在研究pid控制算法在Stewart平台上的应用,通过仿真和分析,探索其在运动控制中的优化效果。 -
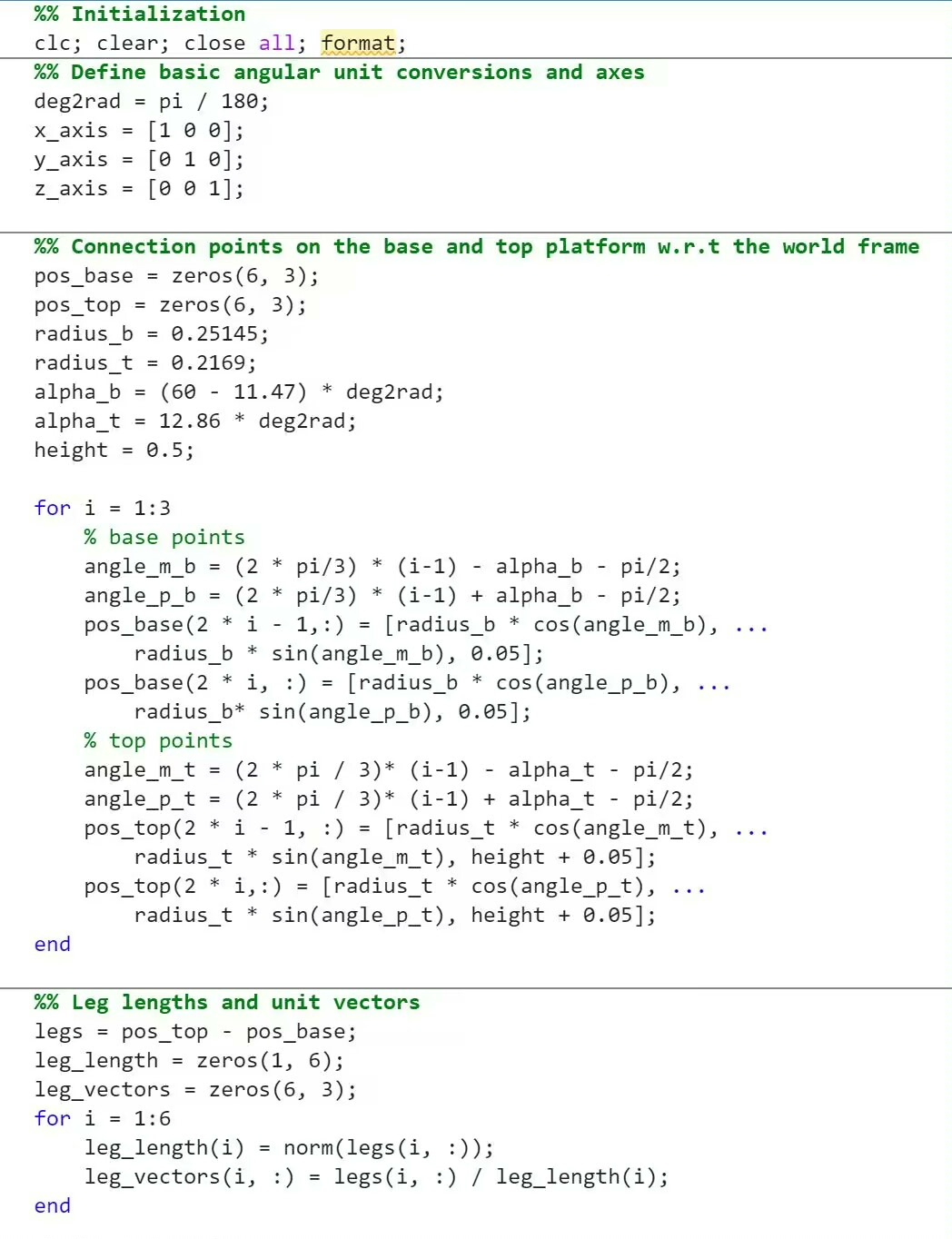
Stewart平台结构和工作原理
Stewart平台由六个可伸缩的支撑杆和一块可移动平台构成,通过支撑杆的伸缩来实现平台的姿态调节和位置控制。该平台通过运动学和动力学建模,实现精确的姿态调节和平台运动控制。 -
PID控制算法原理
pid控制算法是一种经典的闭环控制算法,通过比较目标值和反馈值的差异,根据比例、积分和微分三个部分的权重分配,实现对控制系统的稳定性和响应速度的控制。本文主要研究pid控制算法在Stewart平台上的应用。 -
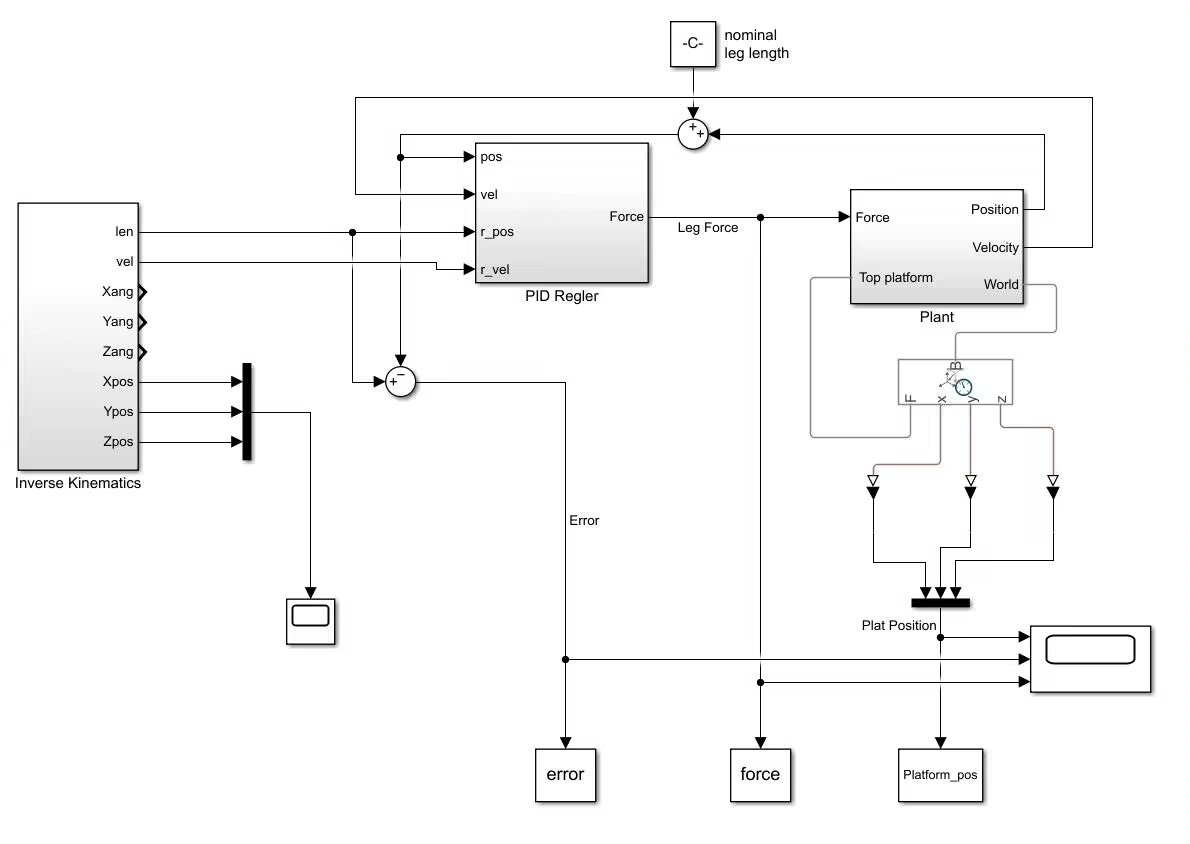
建立Stewart平台动力学仿真模型
通过Simulink和Simscape工具箱,建立Stewart平台的动力学仿真模型。模型中包括六个支撑杆、移动平台和pid控制器等关键组件,通过建立运动学和动力学方程,实现对平台的运动控制。 -
PID控制参数调节与性能分析
在动力学仿真模型中,对pid控制算法的参数进行调节,并分析不同pid参数对Stewart平台性能的影响。包括控制系统的稳定性、响应速度和抗干扰能力等方面的考虑。 -
实验结果与分析
通过模拟实验,获取pid控制算法在Stewart平台上的运动控制效果,并根据实验结果分析pid控制算法对平台性能的优化效果。同时,对实验结果中出现的问题进行分析,提出改进方案。 -
结论与展望
通过本文的研究,证明了pid控制算法在Stewart平台中的优化效果,能够实现对平台运动的精确控制。在今后的研究中,可以进一步探索其他控制算法和方法对Stewart平台的优化控制。
关键词:MATLAB、并联机器人、Stewart平台、pid控制、仿真、Simulink、Simscape、运动学、动力学。
以上相关代码,程序地址:http://wekup.cn/755569927699.html















 856
856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









