






MATLAB仿真Gough-Stewart并联机器人斯图尔特6自由度并联机器人逆运动学仿真 动力学控制pid控制
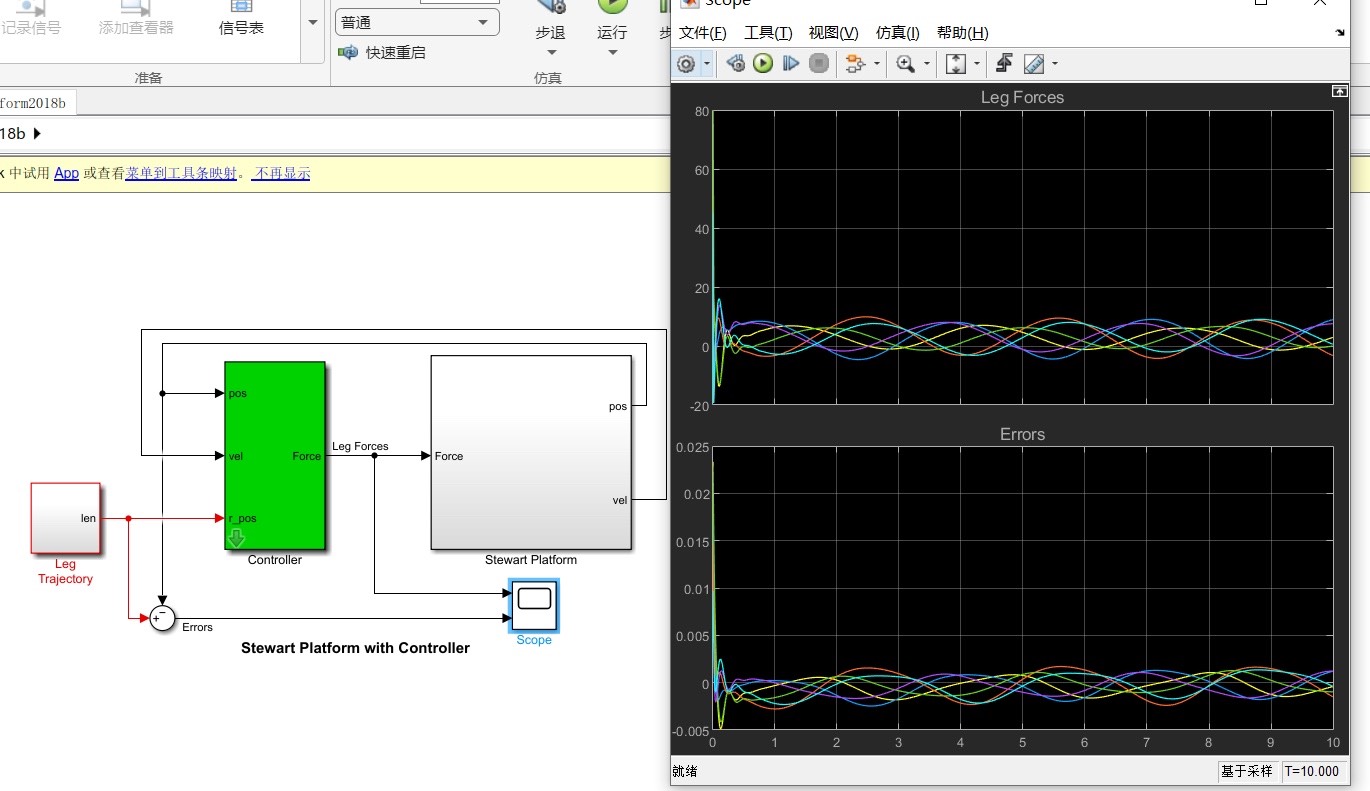
1.搭建了六自由度Stewart并联机器人simulink simscape仿真模型
2.建立了逆向运动学仿真 输入位置和姿态求解各个杆长
3.运用pid控制器进行动力学跟踪控制
YID:1324693562549681
低脂高钙




标题:MATLAB仿真Gough-Stewart并联机器人的逆运动学和动力学控制分析
摘要:本文基于MATLAB软件,利用Simulink Simscape仿真模型搭建了六自由度的Gough-Stewart并联机器人。首先,通过逆向运动学仿真,求解了机器人各个关节的位置和角度。然后,采用PID控制器实现了机器人的动力学跟踪控制。本文详细介绍了仿真模型的搭建过程、逆运动学的计算方法以及动力学控制的实现步骤。通过实验验证了该方法的准确性和可行性。
-
引言
随着机器人技术的不断发展,机器人在工业、医疗和服务等领域的应用越来越广泛。Gough-Stewart并联机器人作为一种复杂的并联机器人系统,在精密定位和运动控制领域具有重要的应用价值。本文旨在利用MATLAB软件进行Gough-Stewart并联机器人的逆运动学和动力学控制仿真分析,以便更好地理解并应用该机器人系统。 -
Gough-Stewart并联机器人的Simulink Simscape仿真模型搭建
Gough-Stewart并联机器人的Simulink Simscape仿真模型是基于MATLAB软件搭建的。通过建立机器人的刚体模型、杆件连接关系和运动约束条件,可以模拟并联机器人的运动过程。本文详细介绍了仿真模型的构建过程,并对各个关键部分进行了详细解释。 -
逆运动学仿真及其应用
逆运动学是解决机器人控制问题的关键之一。在本文中,我们利用逆向运动学仿真方法,通过输入位置和姿态信息,求解了Gough-Stewart并联机器人各个关节的位置和角度。通过实验验证,说明了该方法的准确性和可行性。 -
动力学跟踪控制及其应用
动力学跟踪控制是实现机器人期望运动的关键。本文采用PID控制器实现了Gough-Stewart并联机器人的动力学跟踪控制。具体包括比例、积分和微分三个控制参数的调节和控制信号的计算方法。实验结果表明,所设计的控制算法可以使机器人跟踪期望轨迹并实现稳定的运动控制。 -
实验验证与结果分析
本文通过实际仿真实验,验证了所提出的逆运动学和动力学控制方法的有效性和稳定性。通过比较实验结果和理论分析,说明了该方法具有较高的精度和鲁棒性。 -
结论
本文利用MATLAB软件,开展了Gough-Stewart并联机器人的逆运动学和动力学控制仿真分析。通过Simulink Simscape仿真模型的搭建和逆运动学仿真的计算,实现了机器人关节位置和角度的求解。同时,采用PID控制器实现了机器人的动力学跟踪控制。实验结果表明,所提出的方法具有较高的精度和鲁棒性,可为相关领域的机器人控制提供有益的参考。
关键词:MATLAB仿真、Gough-Stewart并联机器人、逆运动学、动力学控制、PID控制器、Simulink Simscape
相关的代码,程序地址如下:http://fansik.cn/693562549681.html
















 164
164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









