









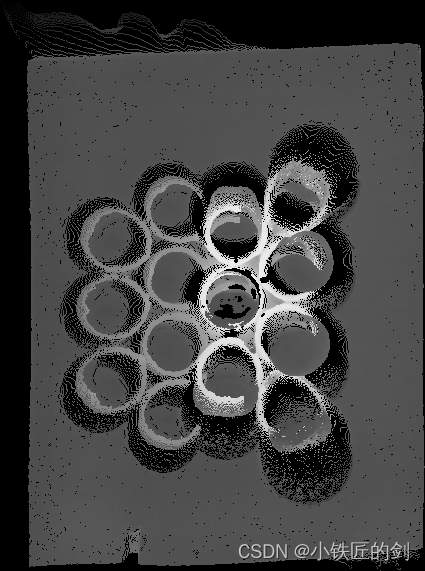
为方便识别目标位置,将点云转化为图像进行识别是一个很好的方法。本程序将点云在x轴方向的宽度作为图像的行,将图像在y轴上的宽度作为图像的列,将z轴上的高度差转化为0-255的像素值进行赋值。
具体程序如下:
#include <iostream>
#include <pcl/filters/passthrough.h>
#include <pcl\point_cloud.h>
#include <pcl\range_image\range_image.h>
#include <vector>
#include <pcl/visualization/common/float_image_utils.h>
#include <pcl/io/png_io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_cloud.h>
#include <pcl/common/transforms.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/console/time.h>
#include <pcl/point_types.h>
#include <opencv2/highgui.hpp>
#include <opencv2/core/types.hpp>
#include <opencv2/core/core.hpp>
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ> pointcloud;
//读入点云
if (pcl::io::loadPCDFile("4.pcd", pointcloud) < 0)
{
PCL_ERROR("目标文件不存在!\n");
return -1;
}
//去除nan点
std::vector<int> mapping;
pcl::removeNaNFromPointCloud(pointcloud, pointcloud, mapping);
//获取点云最值
pcl::PointXYZ min;//用于存放三个轴的最小值
pcl::PointXYZ max;//用于存放三个轴的最大值
pcl::getMinMax3D(pointcloud, min, max);
cout << "min.x = " << min.x << "\n" << endl;
cout << "max.x = " << max.x << "\n" << endl;
cout << "min.y = " << min.y << "\n" << endl;
cout << "max.y = " << max.y << "\n" << endl;
cout << "min.z = " << min.z << "\n" << endl;
cout << "max.z = " << max.z << "\n" << endl;
//定义图像的宽高
int image_rows = max.x - min.x+1 ;
int image_cols = max.y - min.y +1;
cv::Mat image1(image_rows, image_cols, CV_8UC1);
//初始化图像像素为255
for (int i = 0; i < image1.rows; i++)
{
for (int j = 0; j < image1.cols; j++)
{
image1.at<uchar>(i, j) = 0;
}
}
//根据点云高度对图像进行赋值
for (int i = 0; i < pointcloud.points.size(); i++)
{
int image_i, image_j;
if (pointcloud.points[i].x < 0)
{
image_i = - min.x + pointcloud.points[i].x ;
}
else
{
image_i = - min.x + pointcloud.points[i].x; //
}
if (pointcloud.points[i].y < 0)
{
image_j = - min.y + pointcloud.points[i].y;
}
else
{
image_j = - min.y + pointcloud.points[i].y;
}
if( (pointcloud.points[i].z > 0)|| (pointcloud.points[i].z < 0)|| (pointcloud.points[i].z == 0))
{
if (pointcloud.points[i].z - min.z < 255)
{
//根据点云高度,进行0-255转换
image1.at<uchar>(image_i, image_j) = uchar((pointcloud.points[i].z - min.z) / (max.z-min.z)*255);
}
}
else
{
image1.at<uchar>(image_i, image_j) = 0;
}
}
//对图像像素点进行打印
std::cout << image1 << std::endl;
imwrite("0-255_level.bmp", image1);
imshow("生成图像", image1);
waitKey(0);
return (0);
}
点云如下:
转化后图像如下:
















 128
128











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









