







思想:多阶段决策问题转化为一系列单阶段最优化问题。
动态规划在车辆工程技术领域有着广泛的应用,如“两档变速器最优换挡规律”、“混合动力汽车最优能量管理策略”、“栅格地图最优 路径搜索”等。
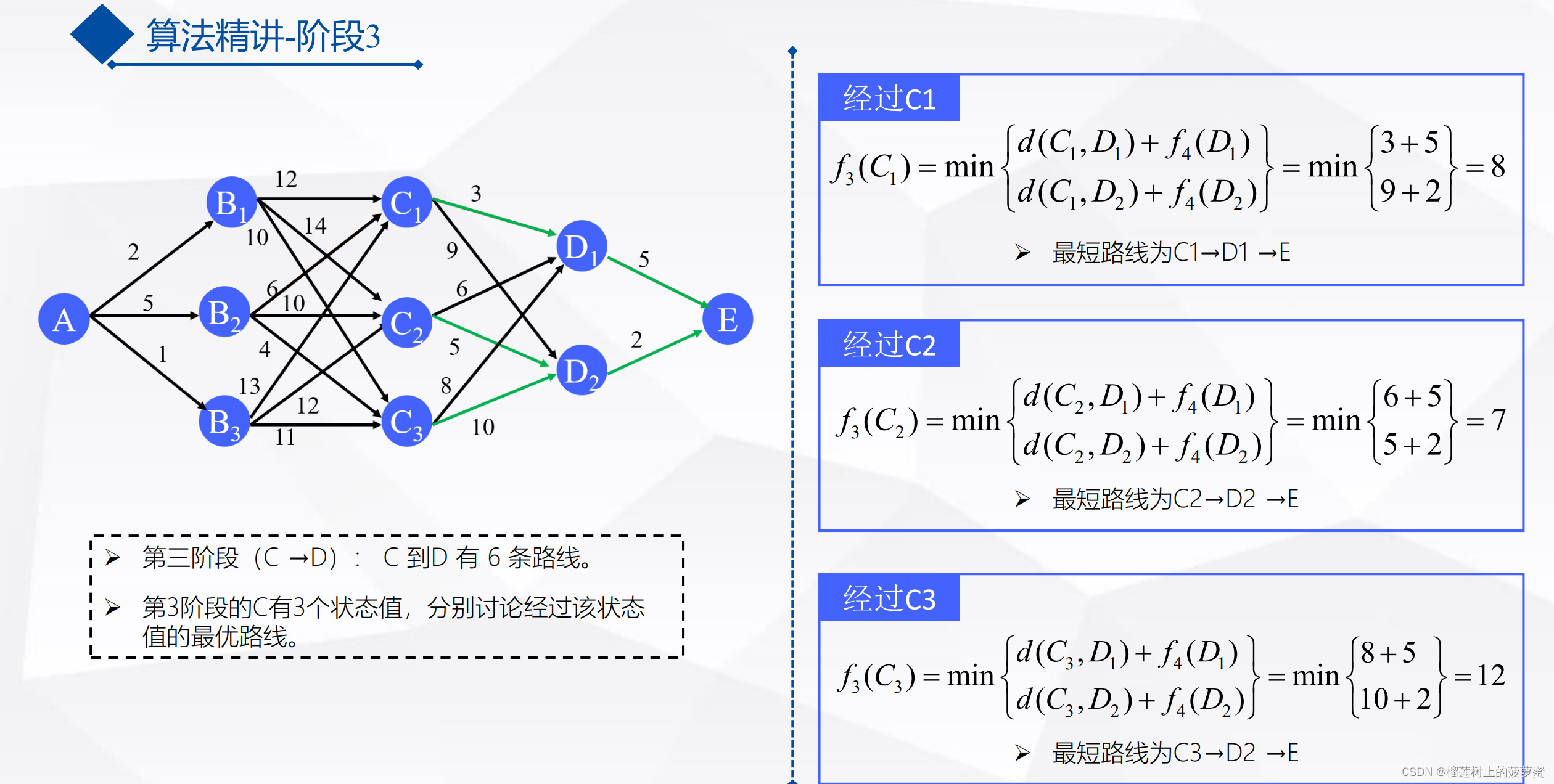
若干个阶段中求某一个阶段的状态值(典型 )
举例说明其中一个阶段(逆向寻优,正向求解)
工程运用难点:前一个阶段的状态值未知,需要约束条件计算得出
%% 逆向寻优
% 第一层循环:逆向遍历每一个阶段
for i = stages-1:-1:1
num_states_f = length(nodes_dist{i, 1});
% 第二层循环:遍历第i阶段的每一个状态
for j = 1:num_states_f
num_states_r = length(nodes_dist{i+1, 1});
% 第三层循环:遍历第i阶段的第j个状态到第i+1阶段的每一条路径
for k = 1:num_states_r
if nodes_dist{i,3}(j,k) + dist{i+1,2}(k,1) < dist{i,2}(j,1)
dist{i,2}(j,1) = nodes_dist{i,3}(j,k) + dist{i+1,2}(k,1);
path{i, 2}(j,:) = [j, path{i+1, 2}(k,:)];
end
end
end
end
%% 正向求解
path_opt = path(1,:);
dist_opt = dist{1,2}; 














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









