







应用:机器人避障,汽车的避障路径规划
被控对象在这两种势场组成的复合场中受到斥力作用和 引力作用,斥力和引力的合力指引着被控对象的运动, 搜索无碰的避障路径。
引力势场

斥力势场:分别对x,y求偏导
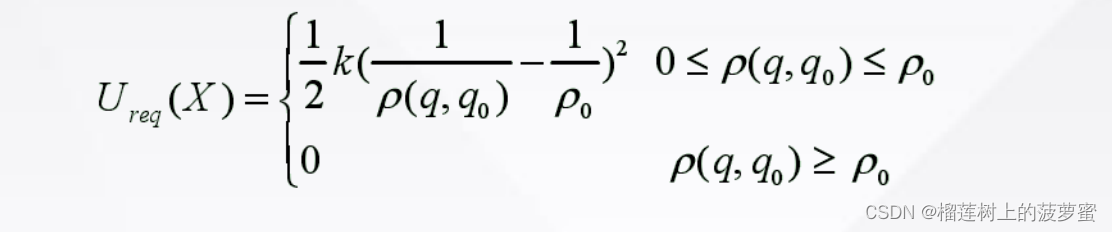
目标不可达的问题
由于障碍物与目标点距离太近,当汽车到达目标点时,根据势场函数可知,目标点的引力降为零, 而障碍物的斥力不为零,此时汽车虽到达目标点,但在斥力场的作用下不能停下来,从而导致目标不可达的问题。
陷入局部最优的问题
车辆在某个位置时,如果若干个障碍物的合斥力与目标点的引力大小相等、方向相反,则合力为0,这将导致车辆不再“受力”,故无法向前搜索避障路径
改进一:通过改进障碍物斥力势场函数来解决局部最优和目标不可达
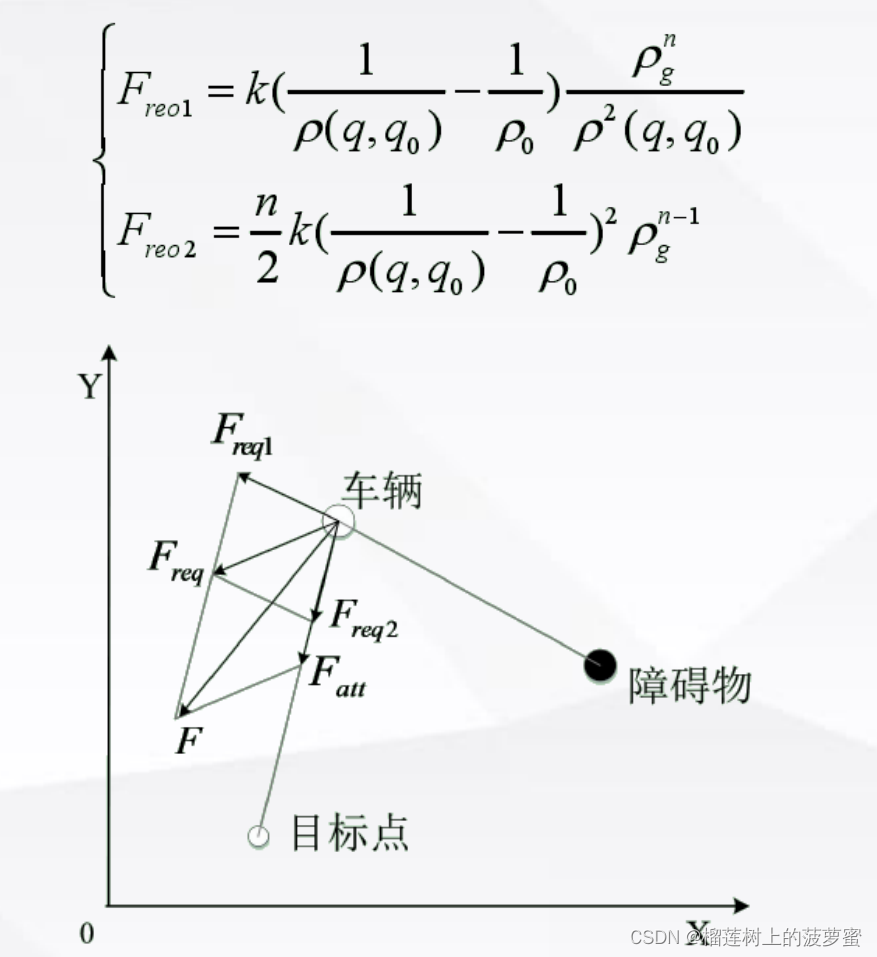
障碍物对车辆产生两个力:(1)障碍物——车辆
(2)力由障碍物产生,但方向是由车辆——目标点(避免局部最优)
改进二:
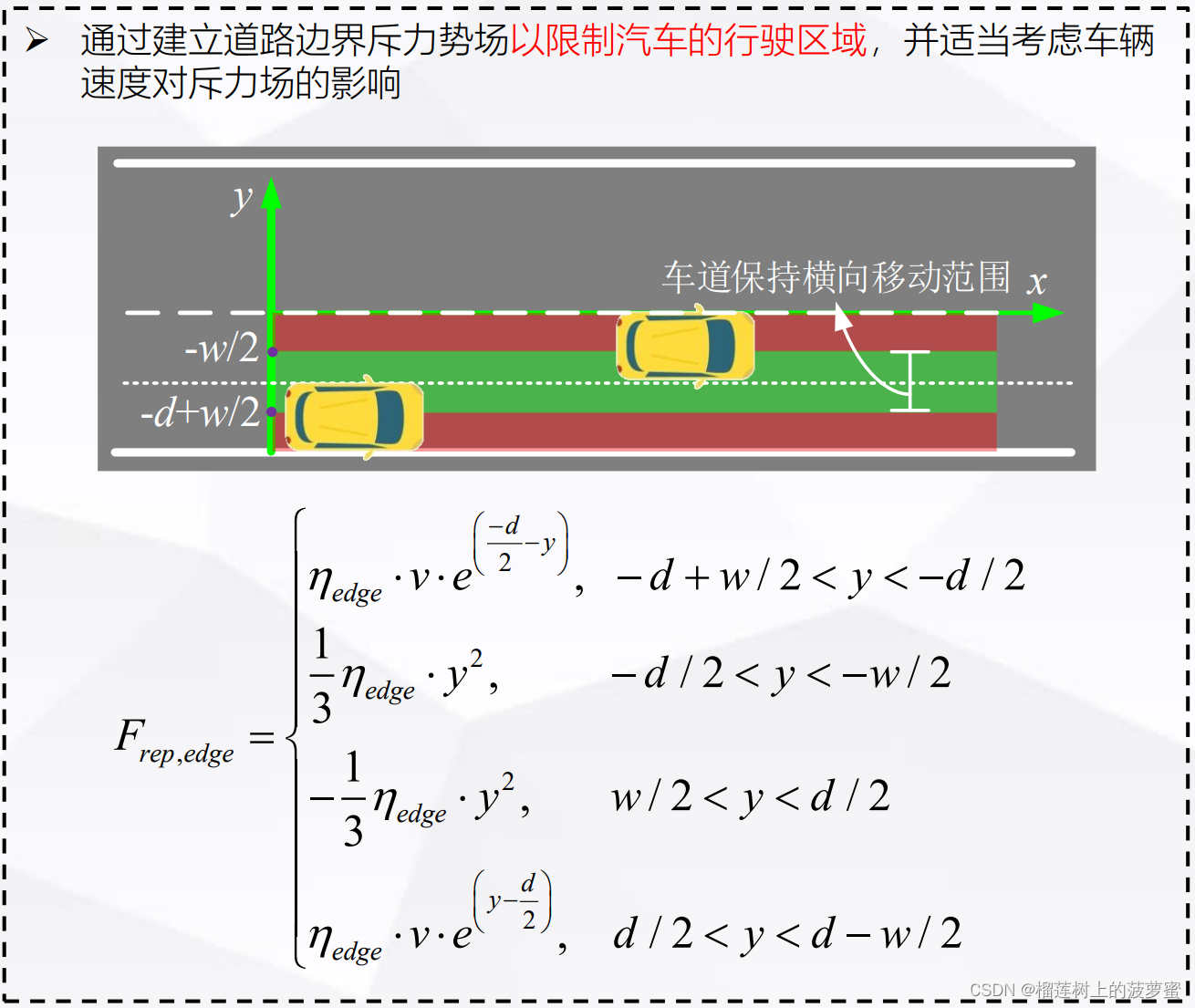
避免到达目标点来回震荡
% 在原斥力势场函数增加目标调节因子(即车辆至目标距离),以使车辆到达目标点后斥力也为0
for j = 1:n-1
if dist(j,1) >= d0
F_rep_ob(j,:) = [0,0];
else%% 计算合力和方向
F_rep = [sum(F_rep_ob(:,1)) + F_rep_edge(1,1),...
sum(F_rep_ob(:,2)) + F_rep_edge(1,2)]; % 所有障碍物的合斥力矢量
F_att = [Eta_att*dist(n,1)*unitVector(n,1), Eta_att*dist(n,1)*unitVector(n,2)]; % 引力矢量
F_sum = [F_rep(1,1)+F_att(1,1),F_rep(1,2)+F_att(1,2)]; % 总合力矢量
UnitVec_Fsum(i,:) = 1/norm(F_sum) * F_sum; % 总合力的单位向量
%计算车的下一步位置
Pi(1,1:2)=Pi(1,1:2)+len_step*UnitVec_Fsum(i,:);
% %判断是否到达终点
% if sqrt((Pi(1)-P(n,1))^2+(Pi(2)-P(n,2))^2) < 0.2
% break
% end
end
Path(i,:)=P(n,:); %把路径向量的最后一个点赋值为目标还有待改进的地方:某些目标点的运动轨迹的曲率是否符合运动学要求等















 1433
1433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









