









小满(bill man)个人原创,欢迎转载,转载请注明地址,小满(bill man)的专栏地址http://blog.csdn.net/bill_man
继续上一篇的内容,我们再看我们上一篇进行的部分
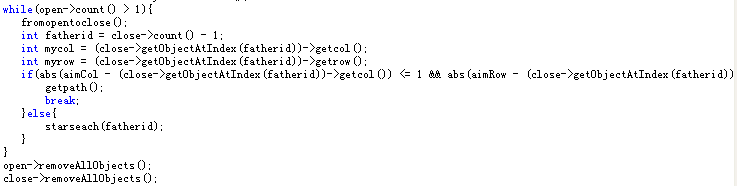
然后我们获得父节点索引,即close列表中的最后一个元素,然后检测该元素,是否离目标位置只差一个点的距离,如果是的话我们就获得了路径,我们首先看如果没到达目标位置时,我们进行A星搜索的函数

在这里,我们分别找目前位置的地图索引值,上下左右位置,首先判断他是否超出了地图的位置,然后检测该点是否是地图中不能去的位置。函数如下
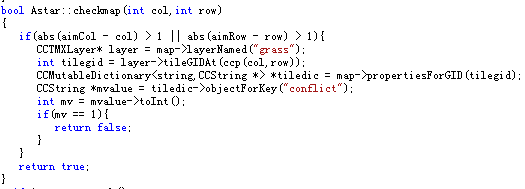
如果没有到达目标位置,就检测该点是否是地图碰撞,如果是碰撞返回false,否则都是true,那么有人会问,我们为什么不检测目标节点是不是碰撞点呢,因为我们会在搜索前就检测这个问题。然后继续回到starseach函数中。后面检测该点是否在open列表中,如果不在open列表中,则把他加入到open列表中,如果该点已在这个open列表中但是确是个更好的解(f值更小)checkopen函数如下:

我们可以看到遍历open列表,如果不存在则返回true,否则返回false,如果这是已经在open列表中并且是个更优解,我们在这里就完成我们的替换
之后检测是否在close列表中就更为简单,遍历close列表,如果则返回false,否则返回true,代码如下:

如有错误之处,希望大家多多指正
下一篇继续A星算法游戏实例















 1547
1547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









