







项目github地址:bitcarmanlee easy-algorithm-interview-and-practice
欢迎大家star,留言,一起学习进步
1.精确一维搜索与非精确一维搜索
在上一篇文章中,我们提到第k次的迭代公式为:
x
k
+
1
=
x
k
+
α
k
d
k
x_{k+1} = x_k + \alpha_kd_k
xk+1=xk+αkdk
其中,
α
k
\alpha_k
αk表示步长。接下来我们讨论一下怎么确定步长。
我们令
φ
(
α
k
)
=
f
(
x
k
+
α
k
d
k
)
\varphi(\alpha_k) = f(x_k + \alpha_k d_k)
φ(αk)=f(xk+αkdk)
假设我们从点
x
k
x_k
xk出发,沿着方向
d
k
d_k
dk进行搜索,确定
φ
(
α
k
)
\varphi(\alpha_k)
φ(αk)值最小,这个过程就叫一维搜索。注意我们在这个搜索过程中假设
x
k
x_k
xk与
d
k
d_k
dk都已经确定,只有
α
k
\alpha_k
αk未知。
如果能直接求出这个最优解
α
k
\alpha_k
αk,那么我们这个
α
k
\alpha_k
αk就被称为最优步长,这种方法被称为最优一维搜索,或者说精确一维搜索。
但是实际情况往往是问题比较复杂,数据维度也很高,直接求精确的最优步长
α
k
\alpha_k
αk可能比较困难,这个时候往往会选择不精确一维搜索来进行代替。
不精确的一维搜索也可以成为近似一维搜索。通常的方法是选择合适的
α
k
\alpha_k
αk,使得目标函数有一定的下降量,即
f
(
x
k
+
α
k
d
k
)
<
f
(
x
k
)
f(x_k + \alpha_kd_k) < f(x_k)
f(xk+αkdk)<f(xk)。或者说,只需要找到一个步长,使得目标函数有一定的下降量就可以了。
2.精确一维搜索之试探法
精确一维搜索主要包括试探法(区间搜索法)与函数逼近法。
其中,常用的试探法又包括进退法,黄金分割法,二分法等。
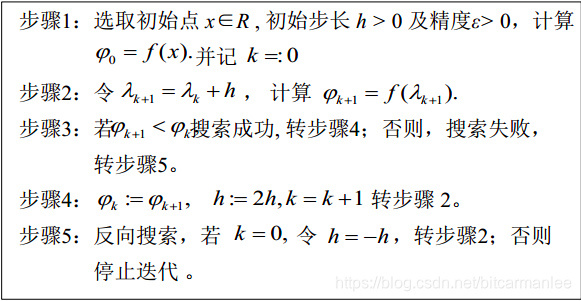
2.1进退法
算法的步骤如下:
1.确定搜索的起点与初始步长。
2.以起点开始以初始步长向前试探。如果函数值变大,改变步长方向。
3.如果函数值下降,维持原来的试探方向,并将步长加倍。
算法的大致流程如下
2.2 黄金分割法
0.618法,又叫黄金分割法,是优选法的一种。它在试验时,把试点安排在黄金分割点上来寻找最佳点。而生产生活中,我们常常取其近似值0.618,因此得名。0.618法是最常用的单因素单峰目标函数优选法之一。(参考文献1)
用0.618法寻找最佳点时,虽然不能保证在有限次内准确找出最佳点,但随着试验次数的增加,最佳点被限定在越来越小的范围内,即存优范围会越来越小。用存优范围与原始范围的比值来衡量一种试验方法的效率,这个比值叫精度。用0.618法确定试点时,每一次实验都把存优范围缩小为原来的0.618.因此,n次试验后的精度为:
δ
n
=
0.61
8
n
−
1
\delta_n = 0.618^{n-1}
δn=0.618n−1
具体的算法细节可以查阅更为详细的文献与参考资料。
2.3 二分法
具体原理与黄金分割类似。
3.精确一维搜索之函数逼近法
如果原函数具有比较好的解析性质,那么可以使用函数逼近(插值)的方法。
3.1 牛顿法
牛顿法的思路就是利用某一点的函数值,一阶导数值,二阶导数值构造二次插值函数。牛顿法最大的优势就是收敛速度快,具有局部二阶收敛的速度。
将
f
(
x
)
f(x)
f(x)在
x
k
x_k
xk点处泰勒展开
f
(
x
)
=
f
(
x
k
)
+
f
′
(
x
k
)
(
x
−
x
k
)
+
f
′
′
(
x
k
)
2
!
(
x
−
x
k
)
2
+
o
(
x
−
x
k
)
2
f(x) = f(x_k) + f'(x_k)(x-x_k) + \frac{f''(x_k)}{2!}(x - x_k)^2 + o(x-x_k)^2
f(x)=f(xk)+f′(xk)(x−xk)+2!f′′(xk)(x−xk)2+o(x−xk)2
要求上面函数的极值,由高等数学的知识,易知
f
′
(
x
)
=
0
f'(x) = 0
f′(x)=0,那么有
f
′
(
x
k
)
+
f
′
′
(
x
k
)
(
x
−
x
k
)
=
0
f'(x_k) + f''(x_k)(x - x_k) = 0
f′(xk)+f′′(xk)(x−xk)=0
求解可知
x
=
x
k
−
f
′
(
x
k
)
f
′
′
(
x
k
)
x = x_k - \frac{f'(x_k)}{f''(x_k)}
x=xk−f′′(xk)f′(xk)
对应到一维搜索中,步长
α
\alpha
α的迭代方式为:
α
k
+
1
=
α
k
−
f
′
(
α
k
)
f
′
′
(
α
k
)
\alpha_{k+1} = \alpha_k - \frac{f'(\alpha_k)}{f''(\alpha_k)}
αk+1=αk−f′′(αk)f′(αk)
每次更新该点,然后迭代查找即可。
3.2 插值法
可以有相应的二次插值,三次插值方法,具体可以查看参考文献2关于插值方法的描述。
4.不精确搜索
由于实际问题的复杂性,使用精确一维搜索往往要付出很高的代价,还不一定能得到比较好的结果。后来慢慢发现,只要遵循一定的规律,算法就很可能达到收敛。
4.1 Armijo-Goldstein准则
Armijo-Goldstein准则的核心思想有两个:
1.目标函数值应该有足够的下降
2.一维搜索的步长
α
\alpha
α不应该太小。
这两个思想的意图非常明显。由于最优化问题的目的就是寻找极小值,因此,让目标函数函数值“下降”是我们努力的方向,所以1正是想要保证这一点。
同理,2也类似:如果一维搜索的步长
α
\alpha
α太小了,那么我们的搜索类似于在原地打转,可能也是在浪费时间和精力。(参考文献3)
所以最后Armijo准则的表达式为两个式子:
f
(
x
k
+
α
k
d
k
)
≤
f
(
x
k
)
+
α
k
ρ
g
k
T
d
k
f(x_k + \alpha_k d_k) \le f(x_k) + \alpha_k \rho g_k^Td_k
f(xk+αkdk)≤f(xk)+αkρgkTdk
f
(
x
k
+
α
k
d
k
)
≥
f
(
x
k
)
+
α
k
(
1
−
ρ
)
g
k
T
d
k
f(x_k + \alpha_k d_k) \ge f(x_k) + \alpha_k (1 - \rho) g_k^Td_k
f(xk+αkdk)≥f(xk)+αk(1−ρ)gkTdk
其中,
0
<
ρ
<
1
/
2
0 \lt \rho \lt 1/2
0<ρ<1/2
为什么上面两个式子就可以满足我们的要求,可以阅读参考文献3,或者查阅相关最优化理论的教材。
4.2 Wolfe-Powell准则
Armijo-Goldstein准则可能会把最优步长因子排除在可接受区间外,因此Wolfe-Powell准则做了相关的改进。
Wolfe-Powell准则也是有两个表达式。第一个表达式与Armijo-Goldstein准则的第一个表达式相同,而第二个表达式为:
∇
f
(
x
k
+
α
k
d
k
)
T
d
k
≥
σ
g
k
T
d
k
,
σ
∈
(
ρ
,
1
)
\nabla f(x_k + \alpha_k d_k)^Td_k \ge \sigma g_k^T d_k, \quad \sigma \in (\rho, 1)
∇f(xk+αkdk)Tdk≥σgkTdk,σ∈(ρ,1)
上面式子的几何解释为:在可接受点处的切线斜率大于等于初始斜率的 σ \sigma σ倍!
参考文献:
1.https://zh.wikipedia.org/wiki/黄金分割法
2.https://blog.csdn.net/bitcarmanlee/article/details/86556744
3.https://www.codelast.com/原创用人话解释不精确线搜索中的armijo-goldstein准则及wo/


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









