






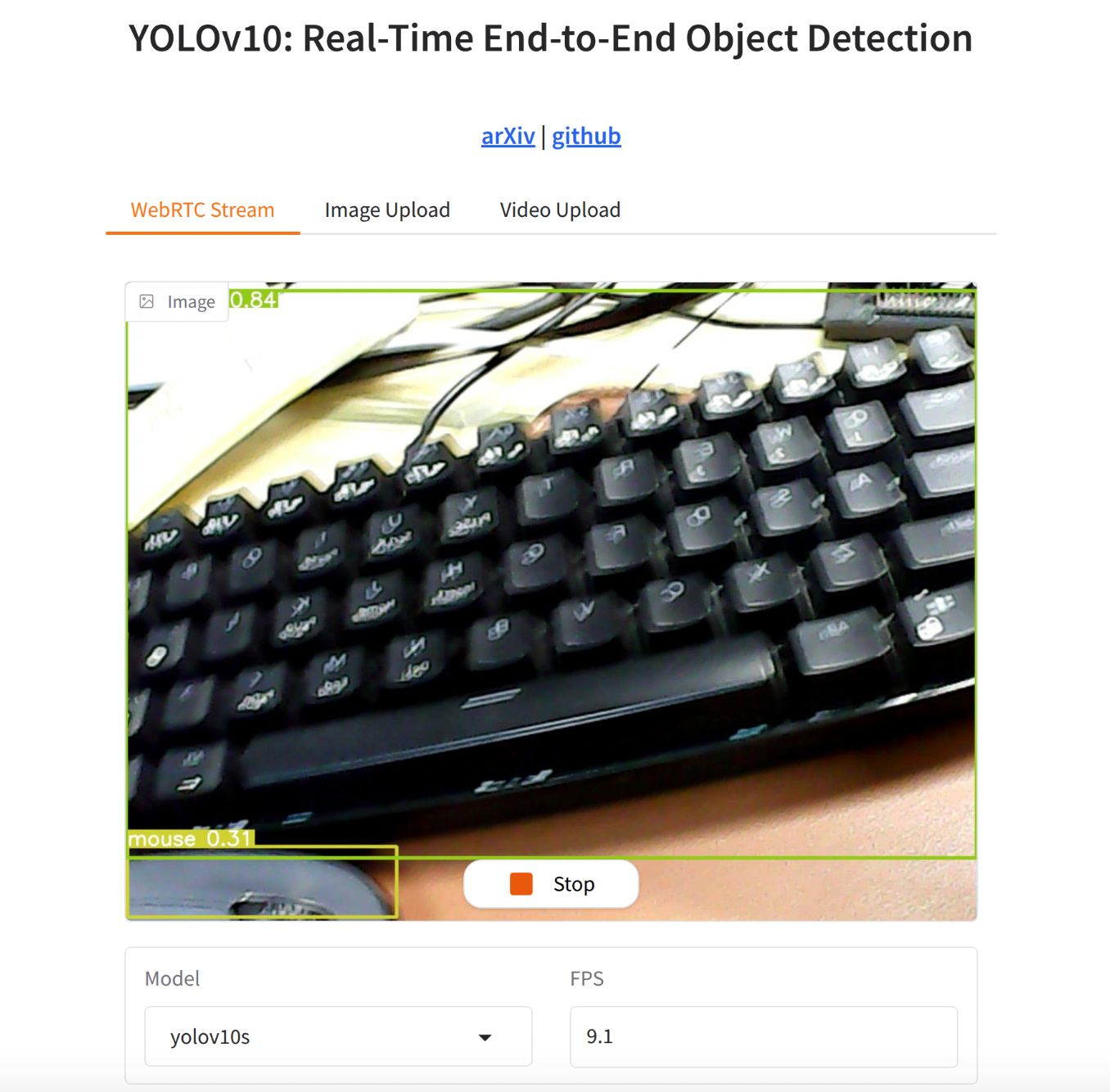
先看一下基本效果:
可实现usb摄像头实时的进行检测,对于中等的yolov10s模型,FPS在8左右。跑的是tensorrt fp16模型。
可视化界面如图:
一、环境配置和usb摄像头配置
参考之前发布的“jetson orin nano super AI模型部署之路(二)保姆级最好用AI环境配置”和“jetson orin nano super AI模型部署之路(六)docker内使用usb摄像头”两篇完成开发环境的配置。
二、yolov10代码修改以使用tensorrt
我们使用的基础代码是清华随着yolov10 paper发布的官方代码:(THU-MIG/yolov10)[https://github.com/THU-MIG/yolov10/tree/main],这个代码基于yolov8改的,很多地方比较老了。我们在步骤一中配置的环境是较新的tensorrt 10,因此要对代码进行一定适配。
首先编写导出tensorrt模型的代码:这里直接导出fp16的模型,精度和fp32差不多,但是性能可以提升1倍。
from ultralytics import YOLOv10
import os
for model_name in [
"yolov10n",
"yolov10s",
"yolov10m",
"yolov10b",
"yolov10l",
"yolov10x",
]:
if not os.path.exists(f"{model_name}.pt"):
print(f"{model_name}.pt not found, skipping export.")
continue
if os.path.exists(f"{model_name}.engine"):
print(f"{model_name}.engine already exists, skipping export.")
continue
model = YOLOv10(f"{model_name}.pt") # Load a pretrained YOLOv10 model
model.export(format="engine", half=True) # creates 'yolo11n.engine'
然后需要修改ultralytics源码内部对于tensorrt导出的代码,以让其支持tensorrt 10.
代码路径是ultralytics/engine/exporteer.py,搜索def export_engine。
export_engine的原始实现是:
@try_export
def export_engine(self, prefix=colorstr("TensorRT:")):
"""YOLOv8 TensorRT export https://developer.nvidia.com/tensorrt."""
assert self.im.device.type != "cpu", "export running on CPU but must be on GPU, i.e. use 'device=0'"
f_onnx, _ = self.export_onnx() # run before TRT import https://github.com/ultralytics/ultralytics/issues/7016
try:
import tensorrt as trt # noqa
except ImportError:
if LINUX:
check_requirements("nvidia-tensorrt", cmds="-U --index-url https://pypi.ngc.nvidia.com")
import tensorrt as trt # noqa
check_version(trt.__version__, "7.0.0", hard=True) # require tensorrt>=7.0.0
self.args.simplify = True
LOGGER.info(f"\n{prefix} starting export with TensorRT {trt.__version__}...")
assert Path(f_onnx).exists(), f"failed to export ONNX file: {f_onnx}"
f = self.file.with_suffix(".engine") # TensorRT engine file
logger = trt.Logger(trt.Logger.INFO)
if self.args.verbose:
logger.min_severity = trt.Logger.Severity.VERBOSE
builder = trt.Builder(logger)
config = builder.create_builder_config()
config.max_workspace_size = self.args.workspace * 1 << 30
# config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace << 30) # fix TRT 8.4 deprecation notice
flag = 1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)
network = builder.create_network(flag)
parser = trt.OnnxParser(network, logger)
if not parser.parse_from_file(f_onnx):
raise RuntimeError(f"failed to load ONNX file: {f_onnx}")
inputs = [network.get_input(i) for i in range(network.num_inputs)]
outputs = [network.get_output(i) for i in range(network.num_outputs)]
for inp in inputs:
LOGGER.info(f'{prefix} input "{inp.name}" with shape{inp.shape} {inp.dtype}')
for out in outputs:
LOGGER.info(f'{prefix} output "{out.name}" with shape{out.shape} {out.dtype}')
if self.args.dynamic:
shape = self.im.shape
if shape[0] <= 1:
LOGGER.warning(f"{prefix} WARNING ⚠️ 'dynamic=True' model requires max batch size, i.e. 'batch=16'")
profile = builder.create_optimization_profile()
for inp in inputs:
profile.set_shape(inp.name, (1, *shape[1:]), (max(1, shape[0] // 2), *shape[1:]), shape)
config.add_optimization_profile(profile)
LOGGER.info(
f"{prefix} building FP{16 if builder.platform_has_fast_fp16 and self.args.half else 32} engine as {f}"
)
if builder.platform_has_fast_fp16 and self.args.half:
config.set_flag(trt.BuilderFlag.FP16)
del self.model
torch.cuda.empty_cache()
# Write file
with builder.build_engine(network, config) as engine, open(f, "wb") as t:
# Metadata
meta = json.dumps(self.metadata)
t.write(len(meta).to_bytes(4, byteorder="little", signed=True))
t.write(meta.encode())
# Model
t.write(engine.serialize())
return f, None
这里面的大部分API都是兼容tensorrt 7的比较旧的,需要更新其为新的API,但是代码也要同时兼容老的API。新的代码修改为:
@try_export
def export_engine(self, dla=None, prefix=colorstr("TensorRT:")):
"""YOLO TensorRT export https://developer.nvidia.com/tensorrt."""
assert self.im.device.type != "cpu", "export running on CPU but must be on GPU, i.e. use 'device=0'"
f_onnx, _ = self.export_onnx() # run before TRT import https://github.com/ultralytics/ultralytics/issues/7016
try:
import tensorrt as trt # noqa
except ImportError:
if LINUX:
check_requirements("tensorrt>7.0.0,!=10.1.0")
import tensorrt as trt # noqa
check_version(trt.__version__, ">=7.0.0", hard=True)
check_version(trt.__version__, "!=10.1.0", msg="https://github.com/ultralytics/ultralytics/pull/14239")
# Setup and checks
LOGGER.info(f"\n{prefix} starting export with TensorRT {trt.__version__}...")
is_trt10 = int(trt.__version__.split(".")[0]) >= 10 # is TensorRT >= 10
assert Path(f_onnx).exists(), f"failed to export ONNX file: {f_onnx}"
f = self.file.with_suffix(".engine") # TensorRT engine file
logger = trt.Logger(trt.Logger.INFO)
if self.args.verbose:
logger.min_severity = trt.Logger.Severity.VERBOSE
# Engine builder
builder = trt.Builder(logger)
config = builder.create_builder_config()
workspace = int((self.args.workspace or 0) * (1 << 30))
if is_trt10 and workspace > 0:
config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace)
elif workspace > 0: # TensorRT versions 7, 8
config.max_workspace_size = workspace
flag = 1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)
network = builder.create_network(flag)
half = builder.platform_has_fast_fp16 and self.args.half
int8 = builder.platform_has_fast_int8 and self.args.int8
# Optionally switch to DLA if enabled
if dla is not None:
# if not IS_JETSON:
# raise ValueError("DLA is only available on NVIDIA Jetson devices")
LOGGER.info(f"{prefix} enabling DLA on core {dla}...")
if not self.args.half and not self.args.int8:
raise ValueError(
"DLA requires either 'half=True' (FP16) or 'int8=True' (INT8) to be enabled. Please enable one of them and try again."
)
config.default_device_type = trt.DeviceType.DLA
config.DLA_core = int(dla)
config.set_flag(trt.BuilderFlag.GPU_FALLBACK)
# Read ONNX file
parser = trt.OnnxParser(network, logger)
if not parser.parse_from_file(f_onnx):
raise RuntimeError(f"failed to load ONNX file: {f_onnx}")
# Network inputs
inputs = [network.get_input(i) for i in range(network.num_inputs)]
outputs = [network.get_output(i) for i in range(network.num_outputs)]
for inp in inputs:
LOGGER.info(f'{prefix} input "{inp.name}" with shape{inp.shape} {inp.dtype}')
for out in outputs:
LOGGER.info(f'{prefix} output "{out.name}" with shape{out.shape} {out.dtype}')
if self.args.dynamic:
shape = self.im.shape
if shape[0] <= 1:
LOGGER.warning(f"{prefix} WARNING ⚠️ 'dynamic=True' model requires max batch size, i.e. 'batch=16'")
profile = builder.create_optimization_profile()
min_shape = (1, shape[1], 32, 32) # minimum input shape
max_shape = (*shape[:2], *(int(max(1, self.args.workspace or 1) * d) for d in shape[2:])) # max input shape
for inp in inputs:
profile.set_shape(inp.name, min=min_shape, opt=shape, max=max_shape)
config.add_optimization_profile(profile)
LOGGER.info(f"{prefix} building {'INT8' if int8 else 'FP' + ('16' if half else '32')} engine as {f}")
if int8:
config.set_flag(trt.BuilderFlag.INT8)
config.set_calibration_profile(profile)
config.profiling_verbosity = trt.ProfilingVerbosity.DETAILED
class EngineCalibrator(trt.IInt8Calibrator):
def __init__(
self,
dataset, # ultralytics.data.build.InfiniteDataLoader
batch: int,
cache: str = "",
) -> None:
trt.IInt8Calibrator.__init__(self)
self.dataset = dataset
self.data_iter = iter(dataset)
self.algo = trt.CalibrationAlgoType.ENTROPY_CALIBRATION_2
self.batch = batch
self.cache = Path(cache)
def get_algorithm(self) -> trt.CalibrationAlgoType:
"""Get the calibration algorithm to use."""
return self.algo
def get_batch_size(self) -> int:
"""Get the batch size to use for calibration."""
return self.batch or 1
def get_batch(self, names) -> list:
"""Get the next batch to use for calibration, as a list of device memory pointers."""
try:
im0s = next(self.data_iter)["img"] / 255.0
im0s = im0s.to("cuda") if im0s.device.type == "cpu" else im0s
return [int(im0s.data_ptr())]
except StopIteration:
# Return [] or None, signal to TensorRT there is no calibration data remaining
return None
def read_calibration_cache(self) -> bytes:
"""Use existing cache instead of calibrating again, otherwise, implicitly return None."""
if self.cache.exists() and self.cache.suffix == ".cache":
return self.cache.read_bytes()
def write_calibration_cache(self, cache) -> None:
"""Write calibration cache to disk."""
_ = self.cache.write_bytes(cache)
# Load dataset w/ builder (for batching) and calibrate
config.int8_calibrator = EngineCalibrator(
dataset=self.get_int8_calibration_dataloader(prefix),
batch=2 * self.args.batch, # TensorRT INT8 calibration should use 2x batch size
cache=str(self.file.with_suffix(".cache")),
)
elif half:
config.set_flag(trt.BuilderFlag.FP16)
# Free CUDA memory
del self.model
gc.collect()
torch.cuda.empty_cache()
# Write file
build = builder.build_serialized_network if is_trt10 else builder.build_engine
with build(network, config) as engine, open(f, "wb") as t:
# Metadata
meta = json.dumps(self.metadata)
t.write(len(meta).to_bytes(4, byteorder="little", signed=True))
t.write(meta.encode())
# Model
t.write(engine if is_trt10 else engine.serialize())
return f, None
这里主要的修改为:
(1)根据不同的tensorrt版本来自动确定分配内存池的API
if is_trt10 and workspace > 0:
config.set_memory_pool_limit(trt.MemoryPoolType.WORKSPACE, workspace)
elif workspace > 0: # TensorRT versions 7, 8
config.max_workspace_size = workspace
(2)在支持DLA的板子上使用DLA来部署模型
# Optionally switch to DLA if enabled
if dla is not None:
# if not IS_JETSON:
# raise ValueError("DLA is only available on NVIDIA Jetson devices")
LOGGER.info(f"{prefix} enabling DLA on core {dla}...")
if not self.args.half and not self.args.int8:
raise ValueError(
"DLA requires either 'half=True' (FP16) or 'int8=True' (INT8) to be enabled. Please enable one of them and try again."
)
config.default_device_type = trt.DeviceType.DLA
config.DLA_core = int(dla)
config.set_flag(trt.BuilderFlag.GPU_FALLBACK)
(3)根据不同的tensorrt版本,来确定build tensorrt engine的API
build = builder.build_serialized_network if is_trt10 else builder.build_engine
with build(network, config) as engine, open(f, "wb") as t:
# Metadata
meta = json.dumps(self.metadata)
t.write(len(meta).to_bytes(4, byteorder="little", signed=True))
t.write(meta.encode())
# Model
t.write(engine if is_trt10 else engine.serialize())
导出tensorrt engine后,然后运行tensorrt的model的时候,同样需要对其推理的代码进行修改以适配tensorrt 10.
ultralytics推理时,会运行到ultralytics/nn/autobacked.py中。针对tensorrt backend,具体的代码是elif engine分支。原始的实现是:
TensorRT
elif engine:
LOGGER.info(f"Loading {w} for TensorRT inference...")
try:
import tensorrt as trt # noqa https://developer.nvidia.com/nvidia-tensorrt-download
except ImportError:
if LINUX:
check_requirements("nvidia-tensorrt", cmds="-U --index-url https://pypi.ngc.nvidia.com")
import tensorrt as trt # noqa
check_version(trt.__version__, "7.0.0", hard=True) # require tensorrt>=7.0.0
if device.type == "cpu":
device = torch.device("cuda:0")
Binding = namedtuple("Binding", ("name", "dtype", "shape", "data", "ptr"))
logger = trt.Logger(trt.Logger.INFO)
# Read file
with open(w, "rb") as f, trt.Runtime(logger) as runtime:
meta_len = int.from_bytes(f.read(4), byteorder="little") # read metadata length
metadata = json.loads(f.read(meta_len).decode("utf-8")) # read metadata
model = runtime.deserialize_cuda_engine(f.read()) # read engine
context = model.create_execution_context()
bindings = OrderedDict()
output_names = []
fp16 = False # default updated below
dynamic = False
for i in range(model.num_bindings):
name = model.get_binding_name(i)
dtype = trt.nptype(model.get_binding_dtype(i))
if model.binding_is_input(i):
if -1 in tuple(model.get_binding_shape(i)): # dynamic
dynamic = True
context.set_binding_shape(i, tuple(model.get_profile_shape(0, i)[2]))
if dtype == np.float16:
fp16 = True
else: # output
output_names.append(name)
shape = tuple(context.get_binding_shape(i))
im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
batch_size = bindings["images"].shape[0] # if dynamic, this is instead max batch size
我们对其修改,添加tensorrt 10的支持。修改后的代码为:
# TensorRT
elif engine:
LOGGER.info(f"Loading {w} for TensorRT inference...")
# if IS_JETSON and check_version(PYTHON_VERSION, "<=3.8.0"):
# # fix error: `np.bool` was a deprecated alias for the builtin `bool` for JetPack 4 with Python <= 3.8.0
# check_requirements("numpy==1.23.5")
try:
import tensorrt as trt # noqa https://developer.nvidia.com/nvidia-tensorrt-download
except ImportError:
if LINUX:
check_requirements("tensorrt>7.0.0,!=10.1.0")
import tensorrt as trt # noqa
check_version(trt.__version__, ">=7.0.0", hard=True)
check_version(trt.__version__, "!=10.1.0", msg="https://github.com/ultralytics/ultralytics/pull/14239")
if device.type == "cpu":
device = torch.device("cuda:0")
Binding = namedtuple("Binding", ("name", "dtype", "shape", "data", "ptr"))
logger = trt.Logger(trt.Logger.INFO)
# Read file
with open(w, "rb") as f, trt.Runtime(logger) as runtime:
try:
meta_len = int.from_bytes(f.read(4), byteorder="little") # read metadata length
metadata = json.loads(f.read(meta_len).decode("utf-8")) # read metadata
except UnicodeDecodeError:
f.seek(0) # engine file may lack embedded Ultralytics metadata
dla = metadata.get("dla", None)
if dla is not None:
runtime.DLA_core = int(dla)
model = runtime.deserialize_cuda_engine(f.read()) # read engine
# Model context
try:
context = model.create_execution_context()
except Exception as e: # model is None
LOGGER.error(f"ERROR: TensorRT model exported with a different version than {trt.__version__}\n")
raise e
bindings = OrderedDict()
output_names = []
fp16 = False # default updated below
dynamic = False
is_trt10 = not hasattr(model, "num_bindings")
num = range(model.num_io_tensors) if is_trt10 else range(model.num_bindings)
for i in num:
if is_trt10:
name = model.get_tensor_name(i)
dtype = trt.nptype(model.get_tensor_dtype(name))
is_input = model.get_tensor_mode(name) == trt.TensorIOMode.INPUT
if is_input:
if -1 in tuple(model.get_tensor_shape(name)):
dynamic = True
context.set_input_shape(name, tuple(model.get_tensor_profile_shape(name, 0)[1]))
if dtype == np.float16:
fp16 = True
else:
output_names.append(name)
shape = tuple(context.get_tensor_shape(name))
else: # TensorRT < 10.0
name = model.get_binding_name(i)
dtype = trt.nptype(model.get_binding_dtype(i))
is_input = model.binding_is_input(i)
if model.binding_is_input(i):
if -1 in tuple(model.get_binding_shape(i)): # dynamic
dynamic = True
context.set_binding_shape(i, tuple(model.get_profile_shape(0, i)[1]))
if dtype == np.float16:
fp16 = True
else:
output_names.append(name)
shape = tuple(context.get_binding_shape(i))
im = torch.from_numpy(np.empty(shape, dtype=dtype)).to(device)
bindings[name] = Binding(name, dtype, shape, im, int(im.data_ptr()))
binding_addrs = OrderedDict((n, d.ptr) for n, d in bindings.items())
batch_size = bindings["images"].shape[0] # if dynamic, this is instead max batch size
其中主要的修改是修改适配tensorrt 10的API:
is_trt10 = not hasattr(model, "num_bindings")
num = range(model.num_io_tensors) if is_trt10 else range(model.num_bindings)
for i in num:
if is_trt10:
name = model.get_tensor_name(i)
dtype = trt.nptype(model.get_tensor_dtype(name))
is_input = model.get_tensor_mode(name) == trt.TensorIOMode.INPUT
if is_input:
if -1 in tuple(model.get_tensor_shape(name)):
dynamic = True
context.set_input_shape(name, tuple(model.get_tensor_profile_shape(name, 0)[1]))
if dtype == np.float16:
fp16 = True
else:
output_names.append(name)
shape = tuple(context.get_tensor_shape(name))
else: # TensorRT < 10.0
name = model.get_binding_name(i)
dtype = trt.nptype(model.get_binding_dtype(i))
is_input = model.binding_is_input(i)
if model.binding_is_input(i):
if -1 in tuple(model.get_binding_shape(i)): # dynamic
dynamic = True
context.set_binding_shape(i, tuple(model.get_profile_shape(0, i)[1]))
if dtype == np.float16:
fp16 = True
三、编写可视化界面
可视化界面使用gradio来搭建。
app的代码如下:
import gradio as gr
import cv2
import tempfile
from ultralytics import YOLOv10
import gradio as gr
import cv2
# from gradio_webrtc import WebRTC
# from fastrtc import WebRTC
from twilio.rest import Client
import os
import numpy as np
import time
import PIL.Image as Image
from collections import deque
from dotenv import load_dotenv
load_dotenv() # 添加在代码开头
account_sid = os.environ.get("TWILIO_ACCOUNT_SID")
auth_token = os.environ.get("TWILIO_AUTH_TOKEN")
if account_sid and auth_token:
print('USE twilio')
client = Client(account_sid, auth_token)
token = client.tokens.create()
rtc_configuration = {
"iceServers": token.ice_servers,
"iceTransportPolicy": "relay",
}
else:
rtc_configuration = None
rtc_configuration = None
# FPS 计算类
class FPS:
def __init__(self, avg_frames=30):
self.timestamps = deque(maxlen=avg_frames) # 用于存储时间戳
def update(self):
self.timestamps.append(time.time()) # 添加当前时间戳
def get(self):
if len(self.timestamps) < 2:
return 0 # 如果时间戳不足,返回 0
# return len(self.timestamps) / (self.timestamps[-1] - self.timestamps[0]) # 计算平均 FPS
return round(len(self.timestamps) / (self.timestamps[-1] - self.timestamps[0]), 1) # 计算平均 FPS,保留一位小数
fps_counter = FPS() # 创建 FPS 计数器实例
from ultralytics import YOLOv10
# model = YOLOv10("runs/V10train/exp3/weights/best.pt")
# model = YOLOv10("./yolov10s.engine")
# print(f'{model = }')
# class ModelManager:
# def __init__(self):
# self.model_cache = {}
#
# def get_model(self, model_id):
# if model_id not in self.model_cache:
# print(f"Loading model: {model_id}")
# self.model_cache[model_id] = YOLOv10(f"./{model_id}.engine")
# return self.model_cache[model_id]
#
# model_manager = ModelManager() # 创建模型管理实例
def yolov10_inference_video(video_path):
fps_counter = FPS()
cap = cv2.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
# 更新 FPS 计数器
fps_counter.update()
# 模型推理
results = model.predict(source=frame, imgsz=640, conf=0.05)
r = results[0]
im_bgr = r.plot() # Ultralytics 默认输出 BGR numpy
# 计算 FPS
fps = fps_counter.get()
cv2.putText(im_bgr, f"FPS: {fps:.1f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
# 将帧返回给 Gradio
yield im_bgr # 使用 yield 逐帧返回推理结果
cap.release()
last_model_id = 'yolov10s' # 用于存储上一个模型 ID
model = YOLOv10("./yolov10s.engine")
print(f'{model = }')
def yolov10_inference(image,model_id):
global model
global last_model_id
if model_id != last_model_id:
last_model_id=model_id
model = YOLOv10(f"./{model_id}.engine")
print(f'\033[92mload model {model_id} success\033[0m')
fps_counter.update()
if 1:
results = model.predict(source=image, imgsz=640, conf=0.05, save=False) # 整个文件夹测试
for r in results:
im_array = r.plot()
im = Image.fromarray(im_array[..., ::-1])
# 计算 FPS
fps = fps_counter.get()
print(f"FPS: {fps:.1f}") # 在控制台打印 FPS
return im,fps
def app():
with gr.Blocks():
with gr.Tabs(): # 添加选项卡
with gr.TabItem("WebRTC Stream"): # WebRTC 输入选项卡
with gr.Row():
with gr.Column():
image = gr.Image(sources=["webcam"], type="pil", streaming=True)
with gr.Row():
model_id = gr.Dropdown(
label="Model",
choices=[
"yolov10n",
"yolov10s",
"yolov10m",
],
value="yolov10s",
)
fps_display = gr.Textbox(label="FPS", interactive=False) # 添加 FPS 显示框
image.stream(
fn=yolov10_inference, inputs=[image,model_id], outputs=[image,fps_display], stream_every=0.1
)
# image = WebRTC(label="Stream", rtc_configuration=rtc_configuration, height=640, width=640)
# image.stream(
# fn=yolov10_inference, inputs=[image], outputs=[image], time_limit=500
# )
with gr.TabItem("Image Upload"): # 图片输入选项卡
with gr.Row():
with gr.Column():
input_image = gr.Image(label="Upload Image", type="pil")
output_image = gr.Image(label="Output Image", type="pil")
input_image.change(
fn=yolov10_inference, inputs=[input_image], outputs=[output_image]
)
with gr.TabItem("Video Upload"):
with gr.Row():
with gr.Column():
video_input = gr.Video(label="Upload Video")
video_output = gr.Video(label="Output Video")
video_input.change(
fn=lambda video_path: list(yolov10_inference_video(video_path)), inputs=[video_input],
outputs=[video_output]
)
gradio_app = gr.Blocks()
with gradio_app:
gr.HTML(
"""
<h1 style='text-align: center'>
YOLOv10: Real-Time End-to-End Object Detection
</h1>
""")
gr.HTML(
"""
<h3 style='text-align: center'>
<a href='https://arxiv.org/abs/2405.14458' target='_blank'>arXiv</a> | <a href='https://github.com/THU-MIG/yolov10' target='_blank'>github</a>
</h3>
""")
with gr.Row():
with gr.Column():
app()
if __name__ == '__main__':
gradio_app.launch(server_name='0.0.0.0')
这段代码是一个基于 Gradio 的 Web 应用程序,用于运行 YOLOv10 模型进行实时目标检测。以下是代码的主要功能和结构的简要解释:
1. 依赖库和环境变量
- 导入了
gradio、cv2、tempfile、os等库,用于构建界面、处理图像/视频和管理文件。 - 使用
dotenv加载环境变量,支持 Twilio 的 WebRTC 配置(如果需要)。 - 定义了
FPS类,用于计算帧率。
2. YOLOv10 模型加载与推理
- 使用
ultralytics库加载 YOLOv10 模型。 - 定义了
yolov10_inference函数,用于对单张图像进行推理。 - 定义了
yolov10_inference_video函数,用于逐帧处理视频并返回推理结果。
3. Gradio 应用界面
- 使用 Gradio 的
Blocks构建了一个多选项卡界面,分为以下功能:- WebRTC Stream: 实时视频流推理,支持从摄像头获取图像并显示推理结果。
- Image Upload: 上传单张图片并进行推理。
- Video Upload: 上传视频文件并逐帧处理,返回推理后的视频。
4. 模型切换
- 支持动态切换 YOLOv10 模型(如
yolov10n、yolov10s等),通过Dropdown选择模型。 - 如果模型 ID 发生变化,会重新加载对应的模型。
5. FPS 显示
- 在实时视频流推理中,使用
FPS类计算帧率,并在推理结果中显示。
6. Gradio 应用启动
- 使用
gr.Blocks构建整个应用界面,并通过gradio_app.launch(server_name='0.0.0.0')启动服务,允许局域网内访问。
代码结构总结
- 推理逻辑: 处理图像和视频的推理函数。
- 界面逻辑: 使用 Gradio 构建多选项卡界面,支持多种输入类型。
- 模型管理: 支持动态加载和切换 YOLOv10 模型。
- 实时功能: 支持实时视频流推理和帧率显示。
这段代码的目标是提供一个用户友好的界面,方便用户在不同输入类型(图像、视频、实时流)上运行 YOLOv10 模型进行目标检测。
四、开箱即用方法
代码我已经都编辑好了,直接clone即可:https://github.com/borninfreedom/yolov10_tensorrt_usb_cam
环境我已经配置好了docker,开箱即用:docker pull wenyan5986/yolov10_tensorrt_usb_cam
启用docker image的命令:
sudo docker run --runtime nvidia --gpus all --net host --ipc host -it \
--device /dev/video0 --device /dev/video1 --name yolo_usb \
-v /home:/home -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix \
wenyan5986/yolov10_tensorrt_usb_cam:latest
以下是该 docker run 命令的解释:
-
sudo docker run:以超级用户权限运行一个 Docker 容器。 -
--runtime nvidia:指定使用 NVIDIA 容器运行时,以支持 GPU 加速。 -
--gpus all:将主机上的所有 GPU 分配给容器使用。 -
--net host:使用主机的网络模式,容器将共享主机的网络接口。 -
--ipc host:使用主机的进程间通信(IPC)命名空间,提升性能。 -
-it:以交互模式运行容器,并附加一个终端。 -
--device /dev/video0 --device /dev/video1:将主机的/dev/video0和/dev/video1设备(通常是 USB 摄像头)挂载到容器中,使容器可以访问这些设备。 -
--name yolo_usb:为容器指定名称为yolo_usb,方便后续管理。 -
-v /home:/home:将主机的/home目录挂载到容器的/home目录中,允许容器访问主机的/home目录。 -
-e DISPLAY=$DISPLAY:将主机的DISPLAY环境变量传递给容器,支持图形界面显示。 -
-v /tmp/.X11-unix:/tmp/.X11-unix:将主机的 X11 Unix 套接字挂载到容器中,允许容器中的 GUI 应用程序与主机的 X 服务器通信。 -
wenyan5986/yolov10_tensorrt_usb_cam:latest:指定要运行的 Docker 镜像为wenyan5986/yolov10_tensorrt_usb_cam,并使用其latest标签版本。
总结:
该命令用于启动一个基于 YOLOv10 的 Docker 容器,支持 GPU 加速、USB 摄像头输入以及图形界面显示,适合在主机上运行实时目标检测应用。

















 3395
3395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









