







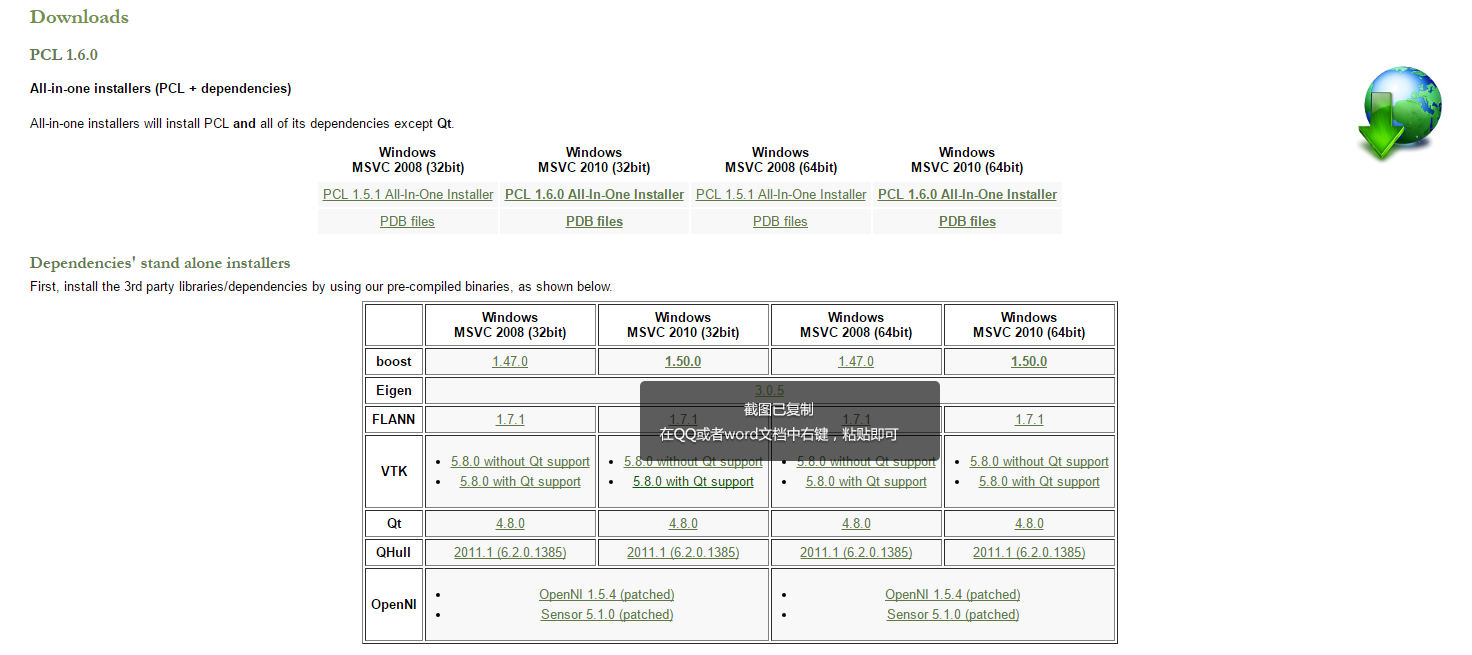
最近在使用pcl库,目前已知更新到pcl 1.7.2。但是官网还是挂着 pcl 1.6的版本。 由于我是用vs2013 所以用”PCL-1.7.2-ALLINOne-msvs2013-win32.exe”
但是在跑kdtree example时,总是出现在kdtree.setInputCloud(cloud)出现错误。
google了半天,原来是FLANN 1.7.1 有bug
“This is a known bug in FLANN 1.7.1: http://dev.pointclouds.org/issues/832. The fix is to upgrade to FLANN >= 1.8.0.”
地址:http://www.pcl-users.org/Kdtree-Radius-Search-Debug-Assertion-Failed-td4025503.html
解决方法:
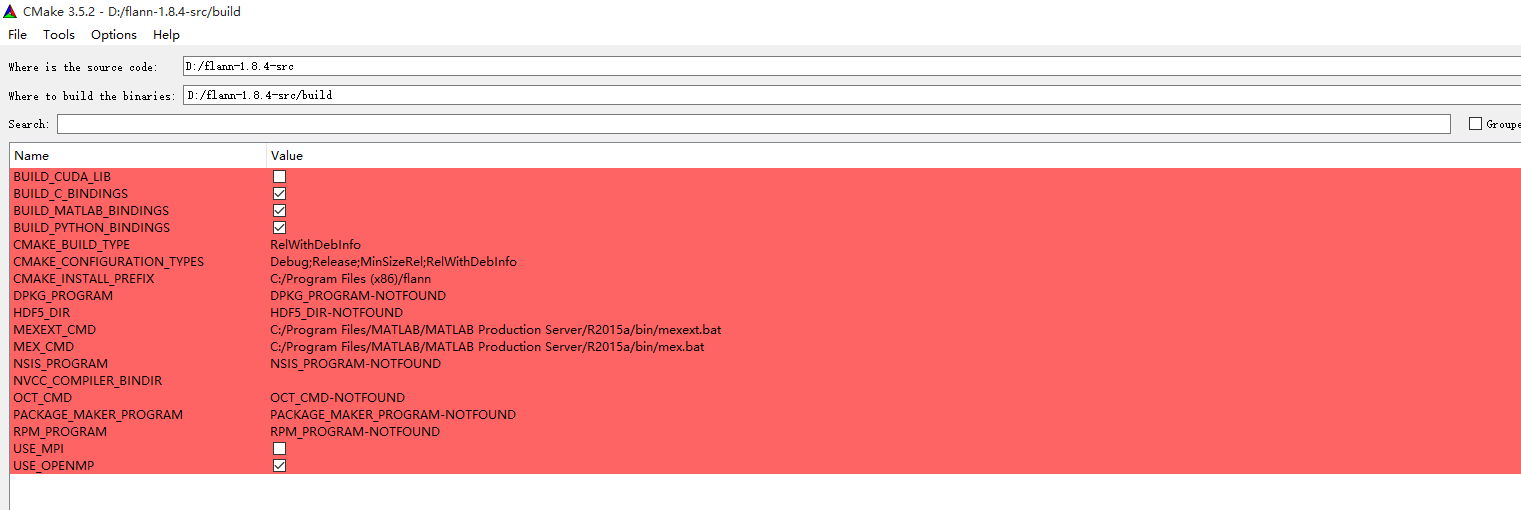
- 下载flann最新代码 http://www.cs.ubc.ca/research/flann/uploads/FLANN/flann-1.8.4-src.zip
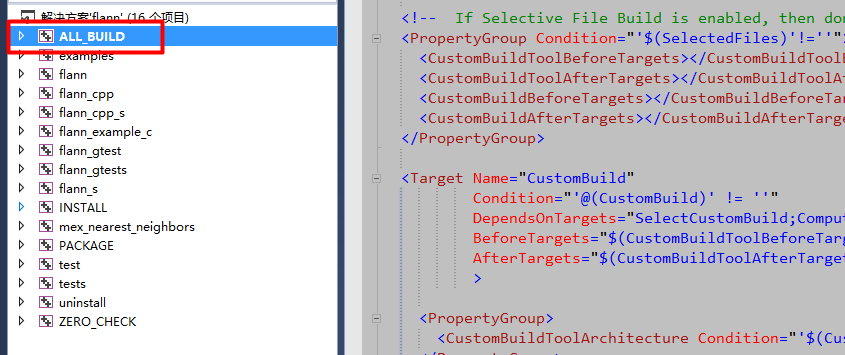
- cmake 构建得到lib
- 把构建得到的lib替换PCL 1.7.2 自带的lib

附上示例代码
QTime time;
time = QTime::currentTime();
qsrand(time.msec() + time.second() * 1000);
//srand(time(NULL));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
// Generate pointcloud data
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i = 0; i < cloud->points.size(); ++i)
{
//cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
//cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
//cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].x = (float)(qrand() % 1024);
cloud->points[i].y = (float)(qrand() % 1024);
cloud->points[i].z = (float)(qrand() % 1024);
}
//pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZ>());
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud);
pcl::PointXYZ searchPoint;
//searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
//searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
//searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.x = (float)(qrand() % 1024);
searchPoint.y = (float)(qrand() % 1024);
searchPoint.z = (float)(qrand() % 1024);














 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









