






udacity 无迹卡尔曼滤波(UKF)python版本。根据网上的C++版本改写,方便大家参考。
参考的文章:
(1)https://www.zhihu.com/people/lin-ming-33-56/posts?page=5
感谢作者的分享文章及代码。
一、引用的库
略。
二、定义矩阵类
略。
三、UKF滤波
(1)处理Radar数据
def Ukf(measurement, dt, x, p):
n_x = 5
n_aug = 7
lambda1 = 3 - n_aug
std_a = 1.6
std_yawdd = 0.6
Xsig_aug = matrix([[0] * 15 for _ in range(7)])
x_aug = matrix([[0] * 1 for _ in range(7)])
p_aug = matrix([[0] * 7 for _ in range(7)])
for row in range(n_x):
x_aug.value[row] = x.value[row]
for col in range(n_x):
for row in range(n_x):
p_aug.value[row][col] = p.value[row][col]
p_aug.value[5][5] = std_a * std_a
p_aug.value[6][6] = std_yawdd * std_yawdd
A = matrix([[0] * 7 for _ in range(7)])
A = p_aug.Cholesky()
A = A.transpose()
for row in range(n_aug):
Xsig_aug.value[row][0] = x_aug.value[row][0]
for col in range(n_aug):
for row in range(n_aug):
Xsig_aug.value[row][col + 1] = x_aug.value[row][0] + sqrt(3) * A.value[row][col]
Xsig_aug.value[row][col + 1 + n_aug] = x_aug.value[row][0] - sqrt(3) * A.value[row][col]
#SigmaPointPrediction()
Xsig_pred = matrix([[0] * 15 for _ in range(5)])
delta_t = dt
for col in range(15):
p_x = Xsig_aug.value[0][col]
p_y = Xsig_aug.value[1][col]
v = Xsig_aug.value[2][col]
yaw = Xsig_aug.value[3][col]
yawd = Xsig_aug.value[4][col]
v_a = Xsig_aug.value[5][col]
v_b = Xsig_aug.value[6][col]
if (fabs(yawd) > 0.001):
px_p = p_x + v / yawd * (sin(yaw + yawd * delta_t) - sin(yaw))
py_p = p_y + v / yawd * (cos(yaw) - cos(yaw + yawd * delta_t))
else:
px_p = p_x + v * delta_t * cos(yaw)
py_p = p_y + v * delta_t * sin(yaw)
v_p = v
yaw_p = yaw + yawd * delta_t
yawd_p = yawd
px_p = px_p + 0.5 * v_a * delta_t * delta_t * cos(yaw)
py_p = py_p + 0.5 * v_a * delta_t * delta_t * sin(yaw)
v_p = v_p + v_a * delta_t
yaw_p = yaw_p + 0.5 * v_b * delta_t * delta_t
yawd_p = yawd_p + v_b * delta_t
Xsig_pred.value[0][col] = px_p
Xsig_pred.value[1][col] = py_p
Xsig_pred.value[2][col] = v_p
Xsig_pred.value[3][col] = yaw_p
Xsig_pred.value[4][col] = yawd_p
#PredictMeanAndCovariance()
weights = matrix([[0] * 15 for _ in range(1)])
x = matrix([[0] * 1 for _ in range(5)])
p = matrix([[0] * 5 for _ in range(5)])
x_diff = matrix([[0] * 1 for _ in range(5)])
x_diff_w = matrix([[0] * 1 for _ in range(5)])
weights.value[0][0] = lambda1 / (lambda1 + n_aug)
weight = 0.5 / (lambda1 + n_aug)
for col in range(1, 15):
weights.value[0][col] = weight
for col in range(15):
for row in range(5):
x.value[row][0] = x.value[row][0] + weights.value[0][col] * Xsig_pred.value[row][col]
M_PI = 3.1415926
for col in range(15):
for row in range(5):
x_diff.value[row][0] = Xsig_pred.value[row][col] - x.value[row][0]
while (row == 3 and x_diff.value[row][0] > M_PI):
x_diff.value[row][0] = x_diff.value[row][0] - 2 * M_PI
while (row == 3 and x_diff.value[row][0] < -M_PI):
x_diff.value[row][0] = x_diff.value[row][0] + 2 * M_PI
x_diff_w.value[row][0] = weights.value[0][col] * x_diff.value[row][0]
p = p + x_diff_w.__mul__(x_diff.transpose())
#PredictRadarMeasurement():
n_z = 3
std_radr = 0.3
std_radphi = 0.03
std_radrd = 0.3
z_diff = matrix([[0] * 1 for _ in range(3)])
z_diff_w = matrix([[0] * 1 for _ in range(3)])
Zsig = matrix([[0] * 15 for _ in range(3)])
z_pred = matrix([[0] * 1 for _ in range(3)])
S = matrix([[0] * 3 for _ in range(3)])
R = matrix([[0] * 3 for _ in range(3)])
for col in range(15):
p_x = Xsig_pred.value[0][col]
p_y = Xsig_pred.value[1][col]
v = Xsig_pred.value[2][col]
yaw = Xsig_pred.value[3][col]
yawd = Xsig_pred.value[4][col]
th_2 = sqrt(p_x * p_x + p_y * p_y)
rho_z = th_2
yaw_z = atan2(p_y, p_x)
rhod_z = (p_x * cos(yaw) * v + p_y * sin(yaw) * v) / th_2
Zsig.value[0][col] = rho_z
Zsig.value[1][col] = yaw_z
Zsig.value[2][col] = rhod_z
for col in range(15):
for row in range(3):
z_pred.value[row][0] = z_pred.value[row][0] + weights.value[0][col] * Zsig.value[row][col]
for col in range(15):
for row in range(3):
z_diff.value[row][0] = Zsig.value[row][col] - z_pred.value[row][0]
while (row == 1 and z_diff.value[row][0] > M_PI):
z_diff.value[row][0] = z_diff.value[row][0] - 2 * M_PI
while (row == 1 and z_diff.value[row][0] < -M_PI):
z_diff.value[row][0] = z_diff.value[row][0] + 2 * M_PI
z_diff_w.value[row][0] = weights.value[0][col] * z_diff.value[row][0]
S = S + z_diff_w.__mul__(z_diff.transpose())
R = matrix([[std_radr * std_radr, 0, 0], [0, std_radphi * std_radphi, 0], [0, 0, std_radrd * std_radrd]])
S = S + R
#UpdateState():
Tc = matrix([[0] * n_z for _ in range(n_x)])
K = matrix([[3] * 1 for _ in range(5)])
z = measurement
for col in range(15):
for row1 in range(5):
x_diff.value[row1][0] = Xsig_pred.value[row1][col] - x.value[row1][0]
while (row1 == 3 and x_diff.value[row1][0] > M_PI):
x_diff.value[row1][0] = x_diff.value[row1][0] - 2 * M_PI
while (row1 == 3 and x_diff.value[row1][0] < -M_PI):
x_diff.value[row1][0] = x_diff.value[row1][0] + 2 * M_PI
x_diff_w.value[row1][0] = weights.value[0][col] * x_diff.value[row1][0]
for row2 in range(3):
z_diff.value[row2][0] = Zsig.value[row2][col] - z_pred.value[row2][0]
while (row2 == 1 and z_diff.value[row2][0] > M_PI):
z_diff.value[row2][0] = z_diff.value[row2][0] - 2 * M_PI
while (row2 == 1 and z_diff.value[row2][0] < -M_PI):
z_diff.value[row2][0] = z_diff.value[row2][0] + 2 * M_PI
Tc = Tc + x_diff_w.__mul__(z_diff.transpose())
K = Tc.__mul__(S.inverse())
z_diff = z - z_pred
while (z_diff.value[1][0] > M_PI):
z_diff.value[1][0] = z_diff.value[1][0] - 2 * M_PI
while (z_diff.value[1][0] < -M_PI):
z_diff.value[1][0] = z_diff.value[1][0] + 2 * M_PI
x = x + K.__mul__(z_diff)
KS = K.__mul__(S)
p = p - KS.__mul__(K.transpose())
return [x, p]
#end ukf()
(2)处理Lidar数据
#PredictRadarMeasurement():
n_z = 2
std_laspx_ = 0.15
std_laspy_ = 0.15
z_diff = matrix([[0] * 1 for _ in range(2)])
z_diff_w = matrix([[0] * 1 for _ in range(2)])
Zsig = matrix([[0] * 15 for _ in range(2)])
z_pred = matrix([[0] * 1 for _ in range(2)])
S = matrix([[0] * 2 for _ in range(2)])
R = matrix([[0] * 2 for _ in range(2)])
for col in range(15):
p_x = Xsig_pred.value[0][col]
p_y = Xsig_pred.value[1][col]
Zsig.value[0][col] = p_x
Zsig.value[1][col] = p_y
for col in range(15):
for row in range(2):
z_pred.value[row][0] = z_pred.value[row][0] + weights.value[0][col] * Zsig.value[row][col]
for col in range(15):
for row in range(2):
z_diff.value[row][0] = Zsig.value[row][col] - z_pred.value[row][0]
z_diff_w.value[row][0] = weights.value[0][col] * z_diff.value[row][0]
S = S + z_diff_w.__mul__(z_diff.transpose())
R = matrix([[std_laspx_ * std_laspx_, 0], [0, std_laspy_ * std_laspy_]])
S = S + R
#UpdateState():
Tc = matrix([[0] * n_z for _ in range(n_x)])
K = matrix([[2] * 1 for _ in range(5)])
z = measurement
for col in range(15):
for row1 in range(5):
x_diff.value[row1][0] = Xsig_pred.value[row1][col] - x.value[row1][0]
x_diff_w.value[row1][0] = weights.value[0][col] * x_diff.value[row1][0]
for row2 in range(2):
z_diff.value[row2][0] = Zsig.value[row2][col] - z_pred.value[row2][0]
Tc = Tc + x_diff_w.__mul__(z_diff.transpose())
K = Tc.__mul__(S.inverse())
z_diff = z - z_pred
x = x + K.__mul__(z_diff)
KS = K.__mul__(S)
p = p - KS.__mul__(K.transpose())
return [x, p]
#end ukf()
四、数据处理
(1)处理Radar数据
file1 = open('obj_pose-laser-radar-synthetic-input.txt', 'r')
file2 = open('obj_pose-laser-radar-synthetic-output-radar-ukf.txt', 'w+')
#input file format:
#L(for laser) meas_px meas_py timestamp gt_px gt_py gt_vx gt_vy
#R(for radar) meas_rho meas_phi meas_rho_dot timestamp gt_px gt_py gt_vx gt_vy
#Output file format:
#est_px est_py est_v gt_px gt_py
meas = matrix([[0] * 1 for _ in range(3)]) # initial measurement
x = matrix([[0] * 1 for _ in range(5)]) # state
p = matrix([[0] * 5 for _ in range(5)]) # covariance
b_init = 0
data = file1.readlines()
for line in data:
line = line.split('\t')
sensor = line[0]
if(sensor == 'R'):
meas.value[0][0] = float(line[1]) #rho
meas.value[1][0] = float(line[2]) #phi
meas.value[2][0] = float(line[3]) #rho-dot
time = float(line[4])
gt_px = float(line[5])
gt_py = float(line[6])
if(b_init == 0):
b_init = 1
pre_t = time
px = meas.value[0][0] * cos(meas.value[1][0])
py = meas.value[0][0] * sin(meas.value[1][0])
vx = meas.value[2][0] * cos(meas.value[1][0])
vy = meas.value[2][0] * sin(meas.value[1][0])
x.value[0][0] = px
x.value[1][0] = py
x.value[2][0] = 0.
x.value[3][0] = 0.
x.value[4][0] = 0.
p = matrix([[1, 0, 0, 0, 0],
[0, 1, 0, 0, 0],
[0, 0, 1, 0, 0],
[0, 0, 0, 1, 0],
[0, 0, 0, 0, 1]])
file2.write(str(x.value[0][0]) + ' ' + #px
str(x.value[1][0]) + ' ' + #py
str(x.value[2][0]) + ' ' + #v
str(gt_px) + ' ' + #gt_px
str(gt_py) +'\n') #gt_py
else:
dt = (time - pre_t) / 1000000.0
pre_t = time
[x, p] = Ukf(meas, dt, x, p)
file2.write(str(x.value[0][0]) + ' ' + # px
str(x.value[1][0]) + ' ' + # py
str(x.value[2][0]) + ' ' + # v
str(gt_px) + ' ' + # gt_px
str(gt_py) + '\n') # gt_py
file1.close()
file2.close()
(2)处理Lidar数据
#main
file1 = open('obj_pose-laser-radar-synthetic-input.txt', 'r')
file2 = open('obj_pose-laser-radar-synthetic-output-lidar-ukf.txt', 'w+')
#input file format:
#L(for laser) meas_px meas_py timestamp gt_px gt_py gt_vx gt_vy
#R(for radar) meas_rho meas_phi meas_rho_dot timestamp gt_px gt_py gt_vx gt_vy
#Output file format:
#est_px est_py gt_px gt_py
meas = matrix([[0] * 1 for _ in range(2)]) # initial measurement
x = matrix([[0] * 1 for _ in range(5)]) # state
p = matrix([[0] * 5 for _ in range(5)]) # covariance
b_init = 0
data = file1.readlines()
for line in data:
line = line.split('\t')
sensor = line[0]
if(sensor == 'L'):
meas.value[0][0] = float(line[1]) #meas_px
meas.value[1][0] = float(line[2]) #meas_py
time = float(line[3])
gt_px = float(line[4])
gt_py = float(line[5])
if(b_init == 0):
b_init = 1
pre_t = time
px = meas.value[0][0]
py = meas.value[1][0]
x.value[0][0] = px
x.value[1][0] = py
p = matrix([[1, 0, 0, 0, 0],
[0, 1, 0, 0, 0],
[0, 0, 1, 0, 0],
[0, 0, 0, 1, 0],
[0, 0, 0, 0, 1]])
file2.write(str(x.value[0][0]) + ' ' + #px
str(x.value[1][0]) + ' ' + #py
str(gt_px) + ' ' + #gt_px
str(gt_py) +'\n') #gt_py
else:
dt = (time - pre_t) / 1000000.0
pre_t = time
[x, p] = Ukf(meas, dt, x, p)
file2.write(str(x.value[0][0]) + ' ' + # px
str(x.value[1][0]) + ' ' + # py
str(gt_px) + ' ' + # gt_px
str(gt_py) + '\n') # gt_py
file1.close()
file2.close()
五、结果对比
(1)对于Radar数据,将ukf滤波获取的结果与真值以及ekf获取的结果进行对比,如下图示:
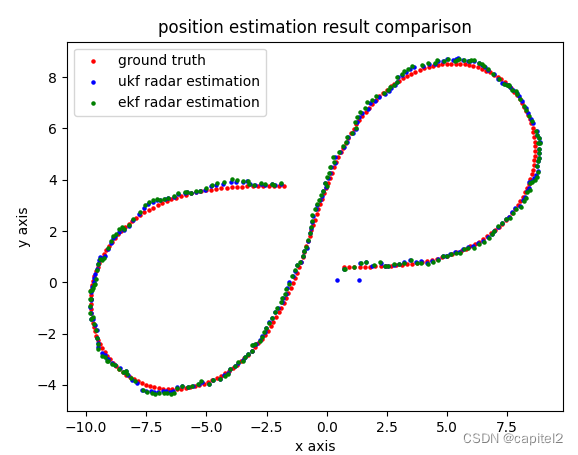
基本上ukf、ekf滤波结果差别不大。
(2)ukf滤波分别对Radar数据与Lidar数据处理,结果如下图示:
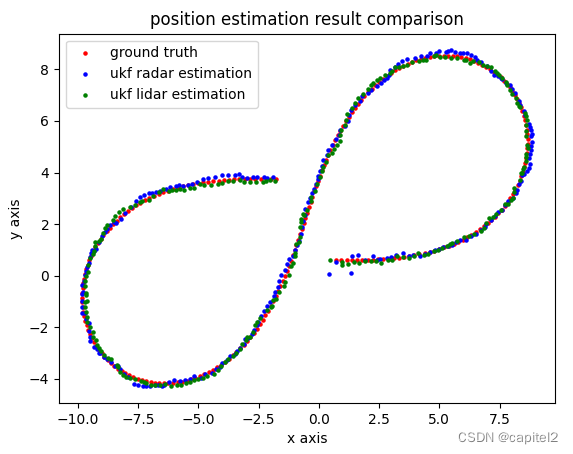
从图上看,同样是Ukf滤波,Lidar传感器的效果好于Radar传感器。
(3)Lidar数据,分别用Ukf滤波以及KF滤波进行处理,结果如下图示:
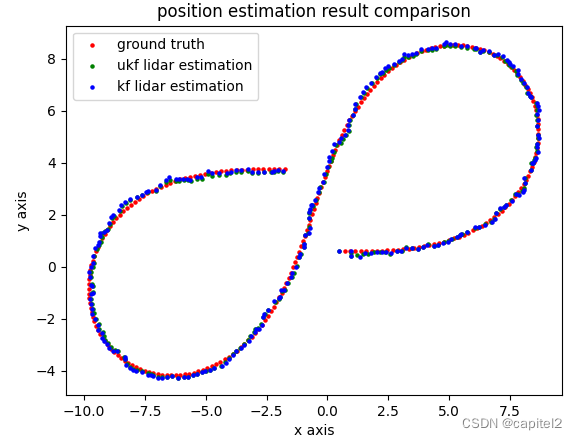
从图上看,对于Lidar传感器数据,采用ukf滤波与KF滤波效果差别不大。
六、关于cholesky分解
本程序中使用的cholesky分解函数对于某些矩阵会判定为非正定矩阵,报错;
本程序中尝试采用np.linalg.cholesky()进行分解,同样报错;
而c++程序中
有知道原因的网友解释一下,谢谢。















 978
978

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









