









1.软件版本
matlab2013b
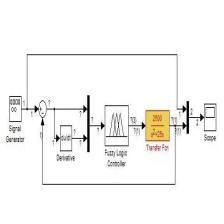
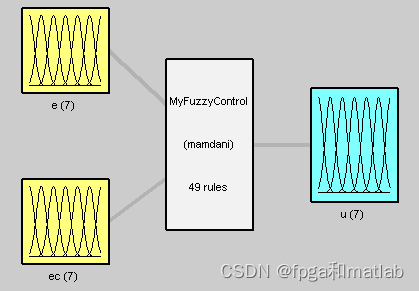
2.系统概述
·第一个模型:
 ;
;![]()
·第二个模型
 ;
;![]() ,U=13.012
,U=13.012
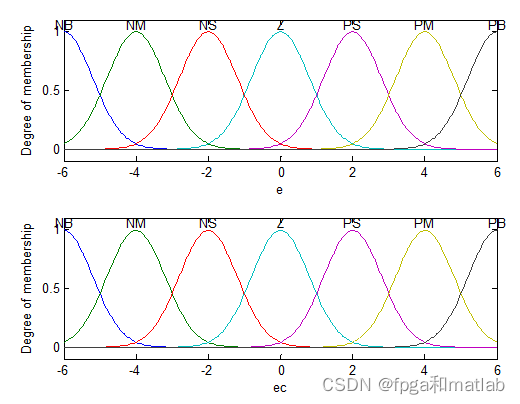
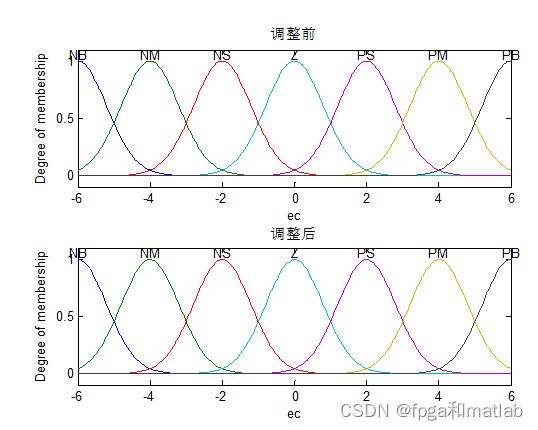
第一:隶属函数的设计

隶属函数的设计,可以通过模糊编辑器,也可以通过如上的代码进行设计。
第二:模糊规则的设计
通过输入模糊规则量化表进行设计,所得到的模糊规则如下所示:
1. If (e is NB) and (ec is NB) then (u is PB) (1)
2. If (e is NB) and (ec is NM) then (u is PB) (1)
3. If (e is NB) and (ec is NS) then (u is PM) (1)
4. If (e is NB) and (ec is Z) then (u is PM) (1)
5. If (e is NB) and (ec is PS) then (u is PS) (1)
6. If (e is NB) and (ec is PM) then (u is PS) (1)
7. If (e is NB) and (ec is PB) then (u is Z) (1)
8. If (e is NM) and (ec is NB) then (u is PB) (1)
9. If (e is NM) and (ec is NM) then (u is PM) (1)
10. If (e is NM) and (ec is NS) then (u is PM) (1)
11. If (e is NM) and (ec is Z) then (u is PS) (1)
12. If (e is NM) and (ec is PS) then (u is PS) (1)
13. If (e is NM) and (ec is PM) then (u is Z) (1)
14. If (e is NM) and (ec is PB) then (u is NS) (1)
15. If (e is NS) and (ec is NB) then (u is PM) (1)
16. If (e is NS) and (ec is NM) then (u is PM) (1)
17. If (e is NS) and (ec is NS) then (u is PS) (1)
18. If (e is NS) and (ec is Z) then (u is PS) (1)
19. If (e is NS) and (ec is PS) then (u is Z) (1)
20. If (e is NS) and (ec is PM) then (u is NS) (1)
21. If (e is NS) and (ec is PB) then (u is NS) (1)
22. If (e is Z) and (ec is NB) then (u is PM) (1)
23. If (e is Z) and (ec is NM) then (u is PS) (1)
24. If (e is Z) and (ec is NS) then (u is PS) (1)
25. If (e is Z) and (ec is Z) then (u is Z) (1)
26. If (e is Z) and (ec is PS) then (u is NS) (1)
27. If (e is Z) and (ec is PM) then (u is NS) (1)
28. If (e is Z) and (ec is PB) then (u is NM) (1)
29. If (e is PS) and (ec is NB) then (u is PS) (1)
30. If (e is PS) and (ec is NM) then (u is PS) (1)
31. If (e is PS) and (ec is NS) then (u is Z) (1)
32. If (e is PS) and (ec is Z) then (u is NS) (1)
33. If (e is PS) and (ec is PS) then (u is NS) (1)
34. If (e is PS) and (ec is PM) then (u is NM) (1)
35. If (e is PS) and (ec is PB) then (u is NM) (1)
36. If (e is PM) and (ec is NB) then (u is PS) (1)
37. If (e is PM) and (ec is NM) then (u is PS) (1)
38. If (e is PM) and (ec is NS) then (u is Z) (1)
39. If (e is PM) and (ec is Z) then (u is NS) (1)
40. If (e is PM) and (ec is PS) then (u is NM) (1)
41. If (e is PM) and (ec is PM) then (u is NM) (1)
42. If (e is PM) and (ec is PB) then (u is NB) (1)
43. If (e is PB) and (ec is NB) then (u is Z) (1)
44. If (e is PB) and (ec is NM) then (u is NS) (1)
45. If (e is PB) and (ec is NS) then (u is NS) (1)
46. If (e is PB) and (ec is Z) then (u is NM) (1)
47. If (e is PB) and (ec is PS) then (u is NM) (1)
48. If (e is PB) and (ec is PM) then (u is NB) (1)
49. If (e is PB) and (ec is PB) then (u is NB) (1)
第三:控制闭环的设计
通常,一个传统的模糊控制器的闭环结构如下所示:
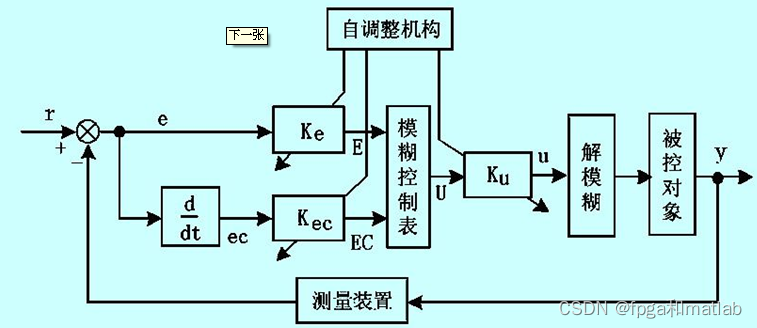
模糊控制器的基本结构:
3.部分源码
addpath 'func\'
title_function
%初始化
fnn_parameter;
%被控对象
a1 = 1.2;
b1 = 1;
b2 = 0.8;
b3 = 0;
ta = 40;
sys = tf(a1,[b1,b2,b3]);
dsys = c2d(sys,0.1,'z');
[num,den] = tfdata(dsys,'v');
ts = 0.1;%采样时间T=0.1
%闭环控制器
for k=1:SIM_times
k
time(k) = k*ts;
%定义输入信号
yd(k) = 2;
%定义输出信号
if k < ta
yn = 0;
else
yn = -den(2)*y1 - den(3)*y2 + num(2)*u1 + num(3)*u2;
end
y2 = y1;
y1 = yn;
y(k) = yn;
u2 = u1;
e2 = e1;
e1 = yd(k)-yn;
e(k) = e1;
ec =(e1-e2);
x1 =(1-exp(-10*e1))/(1+exp(-10*e1));
x2 =(1-exp(-ec))/(1+exp(-ec));
%第1层输出
for i=1:7
o11(i) = x1;
o12(i) = x2;
end
o1=[o11;o12];
%第2层输出
for i=1:2
for j=1:7
z1(i,j) =-((o1(i,j)-a(i,j))^2)/(b(i,j));
o2(i,j) = exp(z1(i,j));
end
end
%第3层输出
for j=1:7
for l=1:7
o3((j-1)*7+l)=o2(1,j)*o2(2,l);
end
end
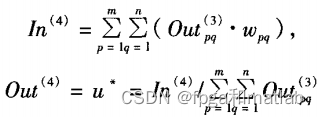
%第4层输出
I=0;
for i=1:49
I = I + o3(i)*Weight(i)/4;
end
o4 = I/(sum(o3));
u(k) = o4;
u1 = o4;
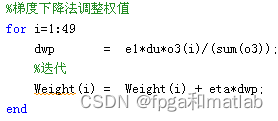
%梯度下降法调整权值
for i=1:49
dwp = e1*du*o3(i)/(sum(o3));
%迭代
Weight(i) = Weight(i) + eta*dwp;
end
%中心值更新
da11=zeros(1,7);
for j=1:7
for l=1:7
da11(j) = da11(j)+(o2(2,l)*((Weight((j-1)*7+l)*sum(o3))-I));
end
da12(1,j) = -e1*du*(2*(o1(1,j)-a(1,j))*(o2(1,j)))/((b(1,j)^2)*(sum(o3))^2);
da1(j) = (da12(1,j))*(da11(j));
end
da21 = zeros(1,7);
for j=1:7
for l=1:7
da21(j) = da21(j)+(o2(1,l)*((Weight((l-1)*7+j)*sum(o3))-I));
end
da22(2,j) = -e1*du*(2*(o1(2,j)-a(2,j))*(o2(2,j))/((b(2,j)^2)*(sum(o3))^2));
da2(j) = (da22(2,j))*(da21(j));
end
da=[da1;da2];
for i=1:2
for j=1:7
a(i,j)=a(i,j)-eta*da(i,j);
end
end
a_s(:,:,k) = a;
if k == 1
a_(:,:,k) = a_s(:,:,1);
else
for i = 1:2
for j = 1:7
dist_tmp(i,j) = (a_s(i,j,k) - a_(i,j))^2;
end
end
dist = sqrt(sum(sum(dist_tmp)));
if dist < 0.1
tmps(:,:,1) = a_(:,:,k-1);
tmps(:,:,2) = a_s(:,:,k);
a_(:,:,k) = mean(tmps(:,:,1:2),3);
else
a_(:,:,k) = a_(:,:,k-1);
end
end
a = a_(:,:,k);
%宽度更新
db11=zeros(1,7);
for j=1:7
for l=1:7
db11(j)=db11(j)+(o2(2,l)*((Weight((j-1)*7+l)*sum(o3))-I));
end
db12(1,j)=-e1*du*(2*(o1(1,j)-a(1,j))^2)*(o2(1,j))/((b(1,j)^3)*(sum(o3))^2);
db1(j)=(db12(1,j))*(db11(j));
end
db21=zeros(1,7);
for j=1:7
for l=1:7
db21(j)=db21(j)+(o2(1,l)*((Weight((l-1)*7+j)*sum(o3))-I));
end
db22(2,j)=-e1*du*(2*(o1(2,j)-a(2,j))^2)*(o2(2,j))/((b(2,j)^3)*(sum(o3))^2);
db2(j)=(db22(2,j))*(db21(j));
end
db=[db1;db2];
for i=1:2
for j=1:7
b(i,j)=b(i,j)-eta*db(i,j);
end
end
b_s(:,:,k) = b;
if k == 1
b_(:,:,k) = b_s(:,:,1);
else
for i = 1:2
for j = 1:7
dist_tmp(i,j) = (b_s(i,j,k) - b_(i,j))^2;
end
end
dist = sqrt(sum(sum(dist_tmp)));
if dist < 0.1
tmps(:,:,1) = b_(:,:,k-1);
tmps(:,:,2) = b_s(:,:,k);
b_(:,:,k) = mean(tmps(:,:,1:2),3);
else
b_(:,:,k) = b_(:,:,k-1);
end
end
b = b_(:,:,k);
%算法
s11 = y1;
s12 = y2;
s13 = u1;
s14 = u2;
s1 =[s11;s12;s13;s14];
for i=1:5
net2(i) = w2(i,:)*s1 + theta2(i);
s2(i) = (1-exp(-net2(i)))/(1+exp(-net2(i)));
end
net3 = w3*s2+theta3;
yg = am*(1-exp(-net3))/(1+exp(-net3));
for i=1:5
delta2(i)=0.5*(1-s2(i))*(1+s2(i));
end
delta3=0.5*am*(1-yg/am)*(1+yg/am);
for i=1:5
theta22(i) = theta2(i)-theta21(i);
theta21(i) = theta2(i);
theta2(i) = theta2(i)+eta1*(yn-yg)*delta3*w3(i)*delta2(i)+beta1*theta22(i);
end
theta32 = theta3-theta31;
theta31 = theta3;
theta3 = theta3+eta1*(yn-yg)*delta3+beta1*theta32;
for i=1:5
for j=1:4
w22(i,j) = w2(i,j)-w21(i,j);
w21(i,j) = w2(i,j);
w2(i,j) = w2(i,j)-eta1*(yn-yg)*delta3*w3(i)*delta2(i)*s1(j)+beta1*w22(i,j);
end
w32(i) = w3(i)-w31(i);
w31(i) = w3(i);
w3(i) = w3(i)-eta1*(yn-yg)*delta3*s2(i)+beta1*w32(i);
end
a2 = am-a1;
a1 = am;
am = am+eta1*(yn-yg)*yg/am+beta1*a2;
sum1 = 0;
for i=1:5
sum1 = sum1 + w3(i)*delta2(i)*w2(i,3);
end
du = delta3*sum1;
end
figure;
plot(time,y,'r', time,yd,'b');
grid on
figure;
subplot(121);
plot(a_s(1,:,SIM_times),a_s(2,:,SIM_times),'o');
grid on
axis square
subplot(122);
plot(b_s(1,:,SIM_times),b_s(2,:,SIM_times),'o');
grid on
axis square
save Simu_Results\fnn_result.mat time y
save Simu_Results\nfis.mat a b
这里重点介绍一下模糊神经网络控制器的设计,
第一:四层化神经网络层的结构设计:
第1层:
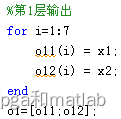
![]()
第2层:

![]()
第3层:

![]()
第4层:

第二:利用梯度下降法进行权值更新

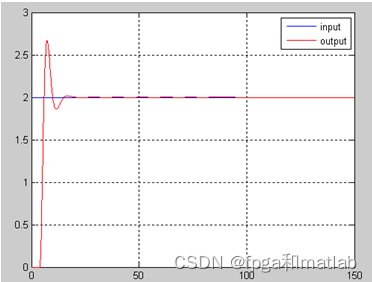
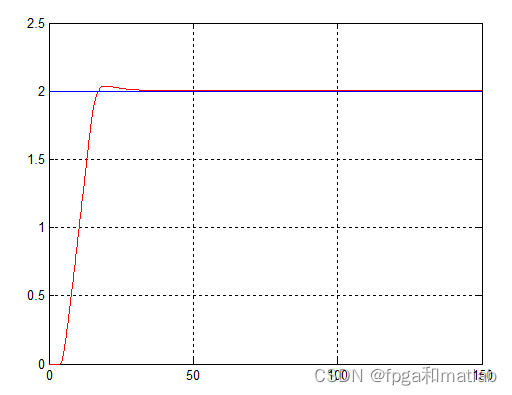
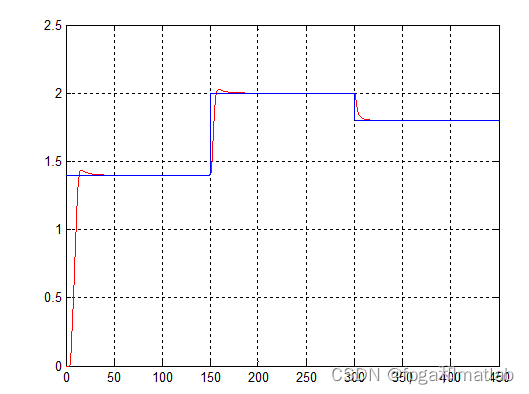
4.仿真结果
模糊控制效果图(模型一):
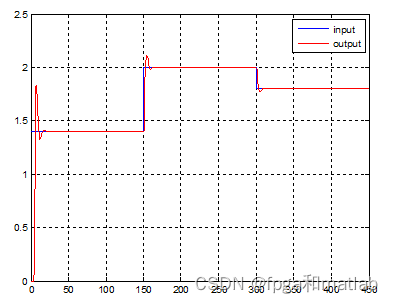
模糊控制效果图(模型二):
隶属函数如下所示:



A05-06
















 4633
4633











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











