







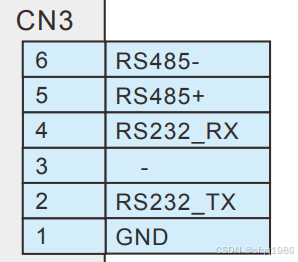
驱动器:
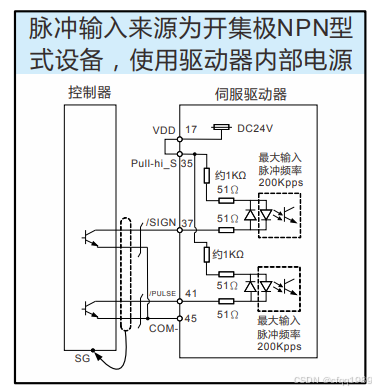
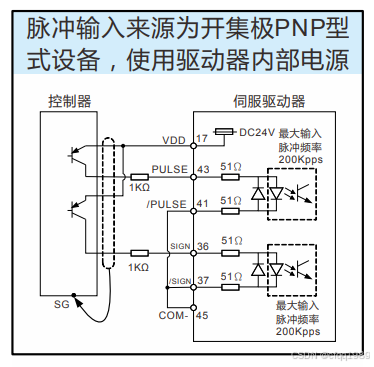
35【+24v】 37方向/ 41脉冲/
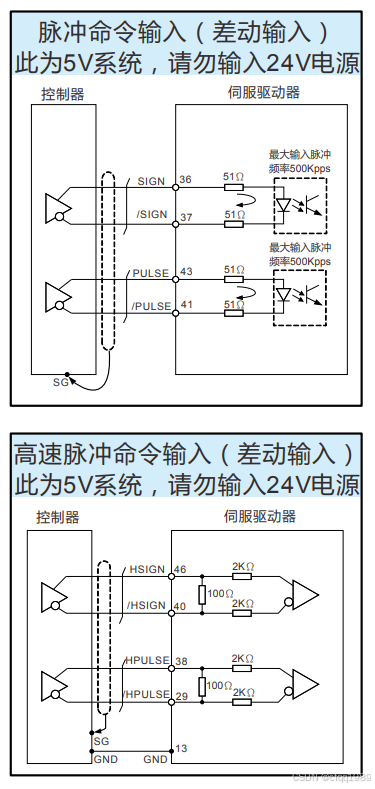
36【+5v 】 37方向/ 43【+5V】41脉冲/
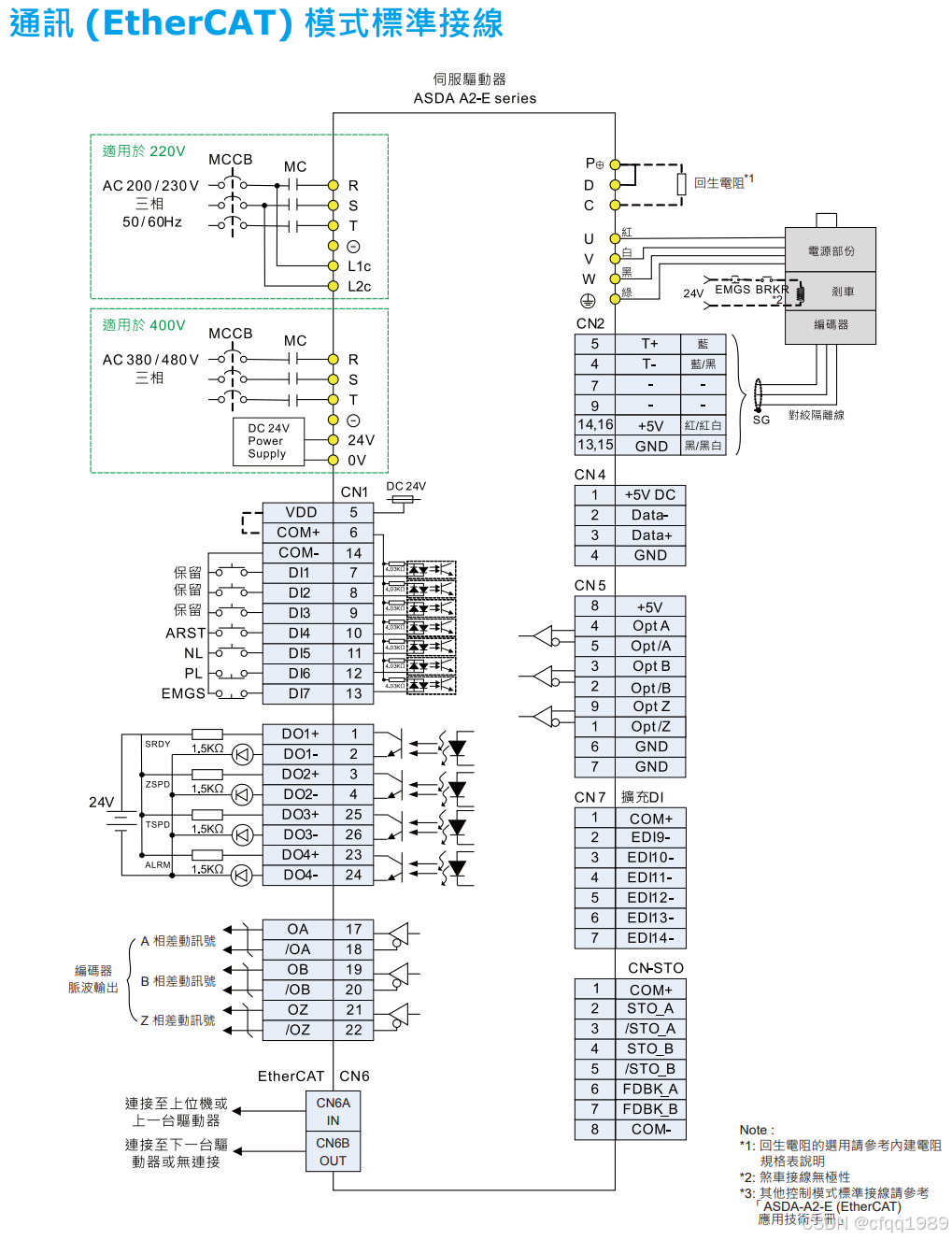
1. 使用外部回生电阻时,P ⊕、C 端接电阻,P ⊕、D 端开路
2. 使用内部回生电阻时,P ⊕、C 端开路,P ⊕、D 端需短路。
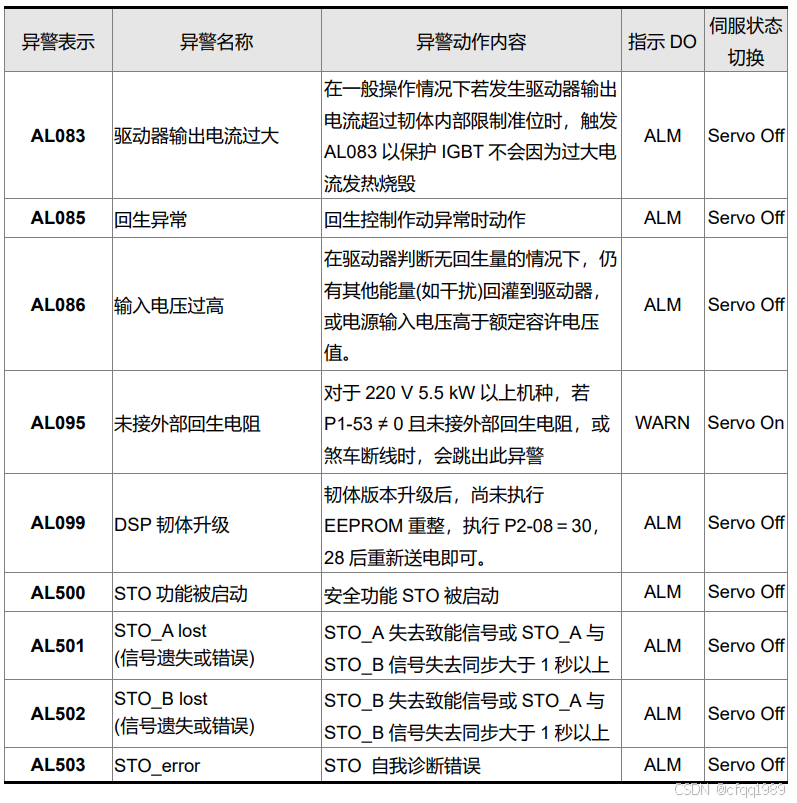
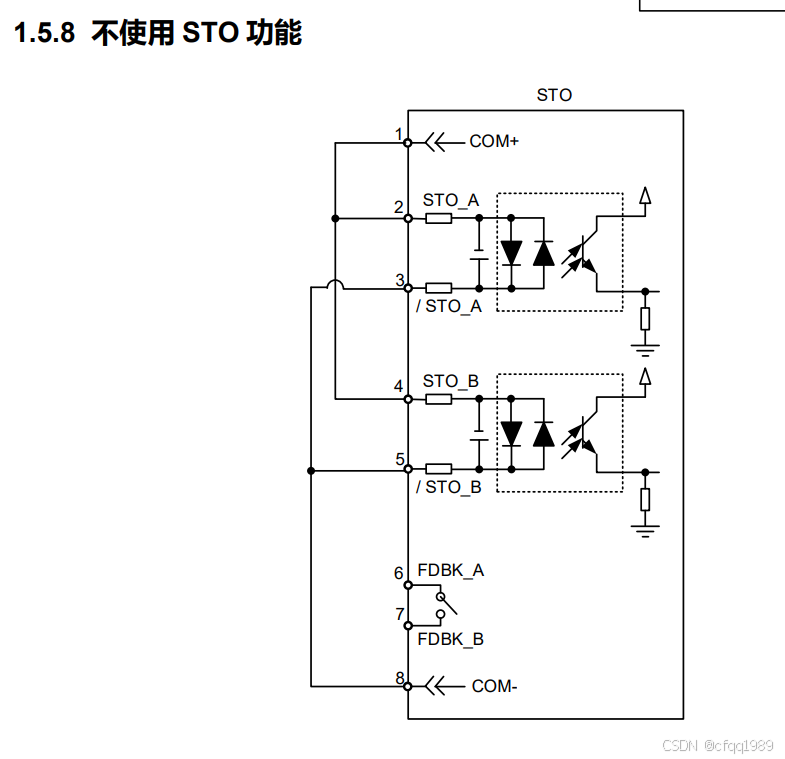
STO:124短接,358短接。
P1-44分母 P1-45分子
绝对位置重置:P2-08=271,P2-71=1
P2-69 0增量1绝对
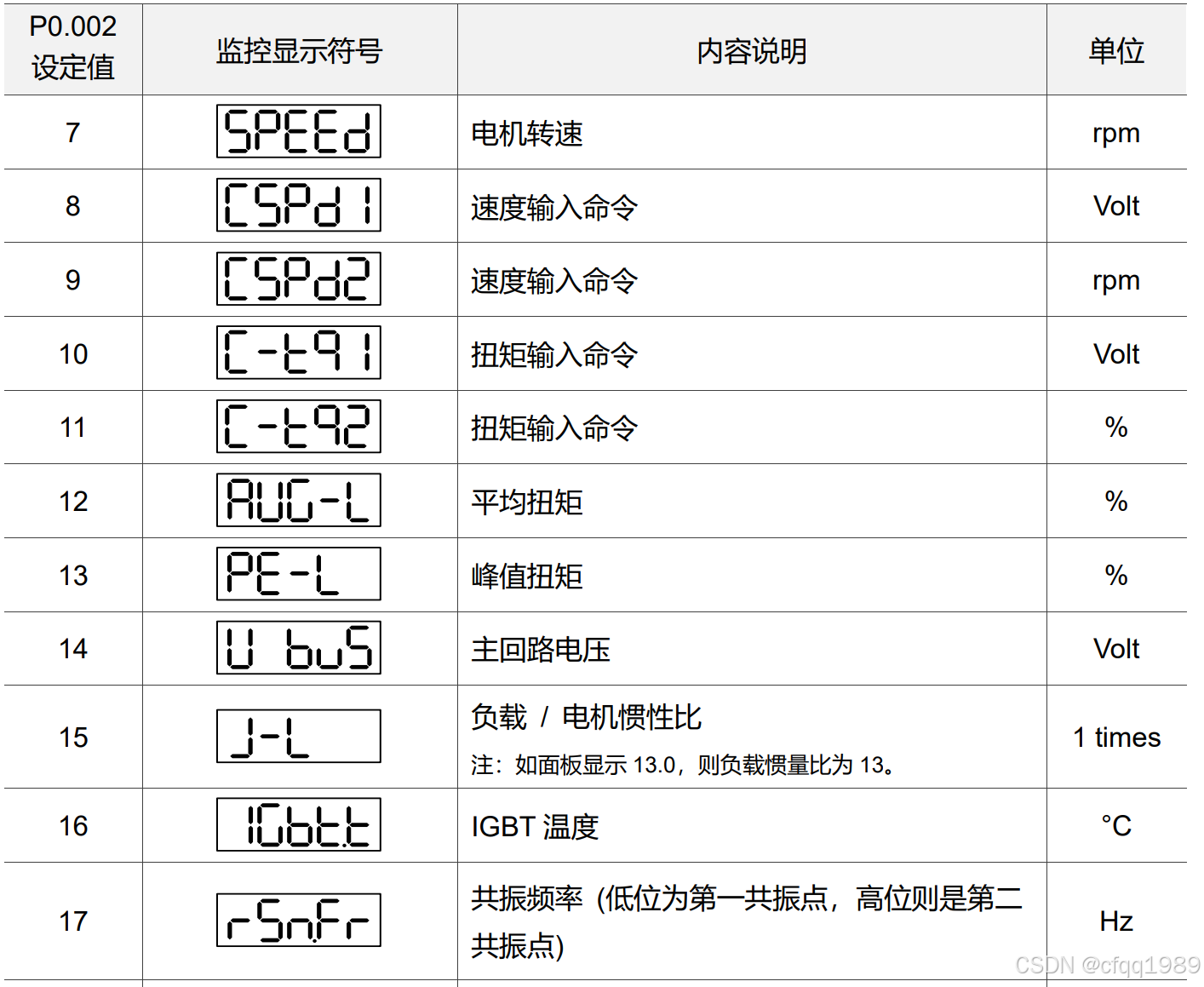
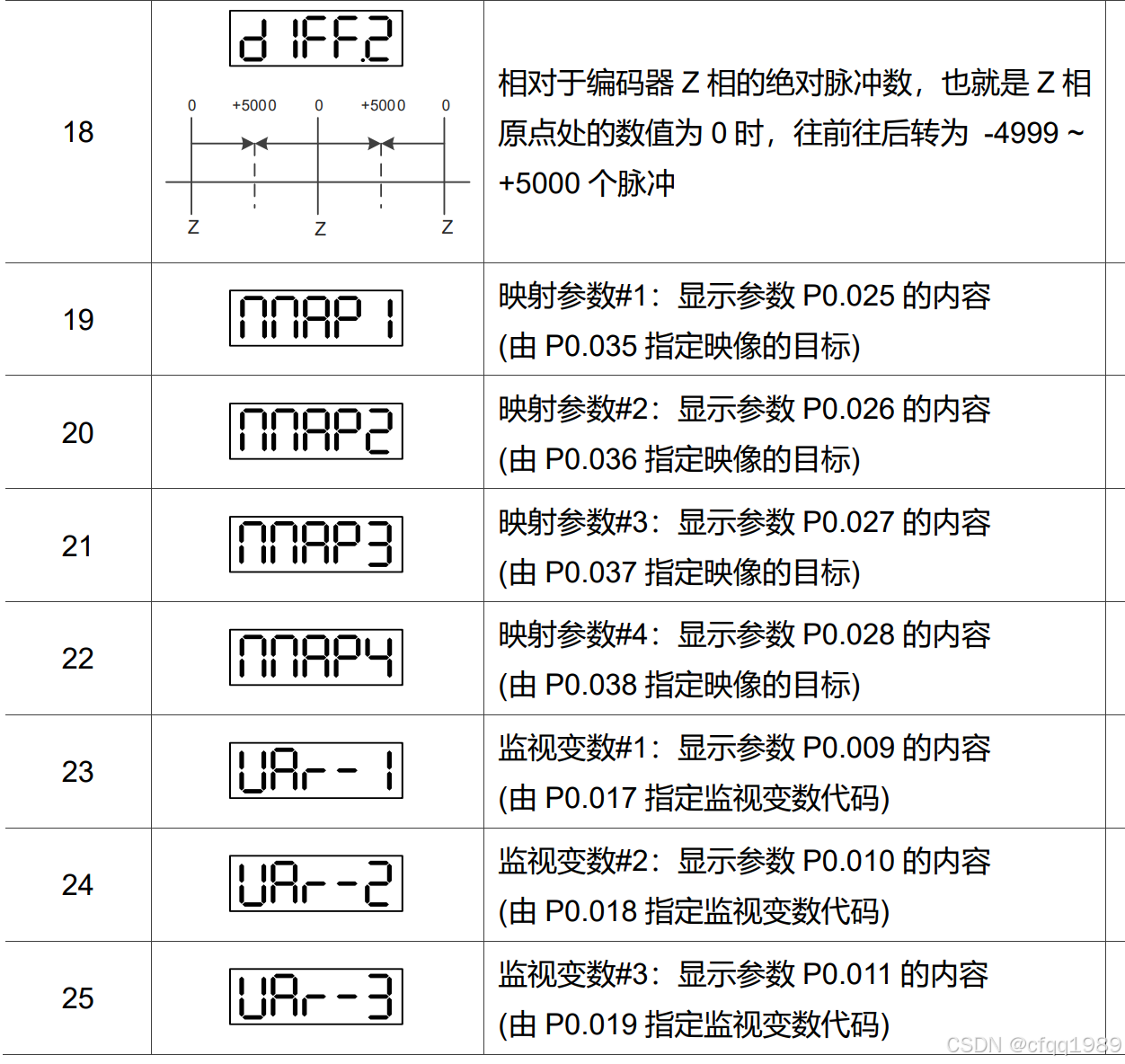
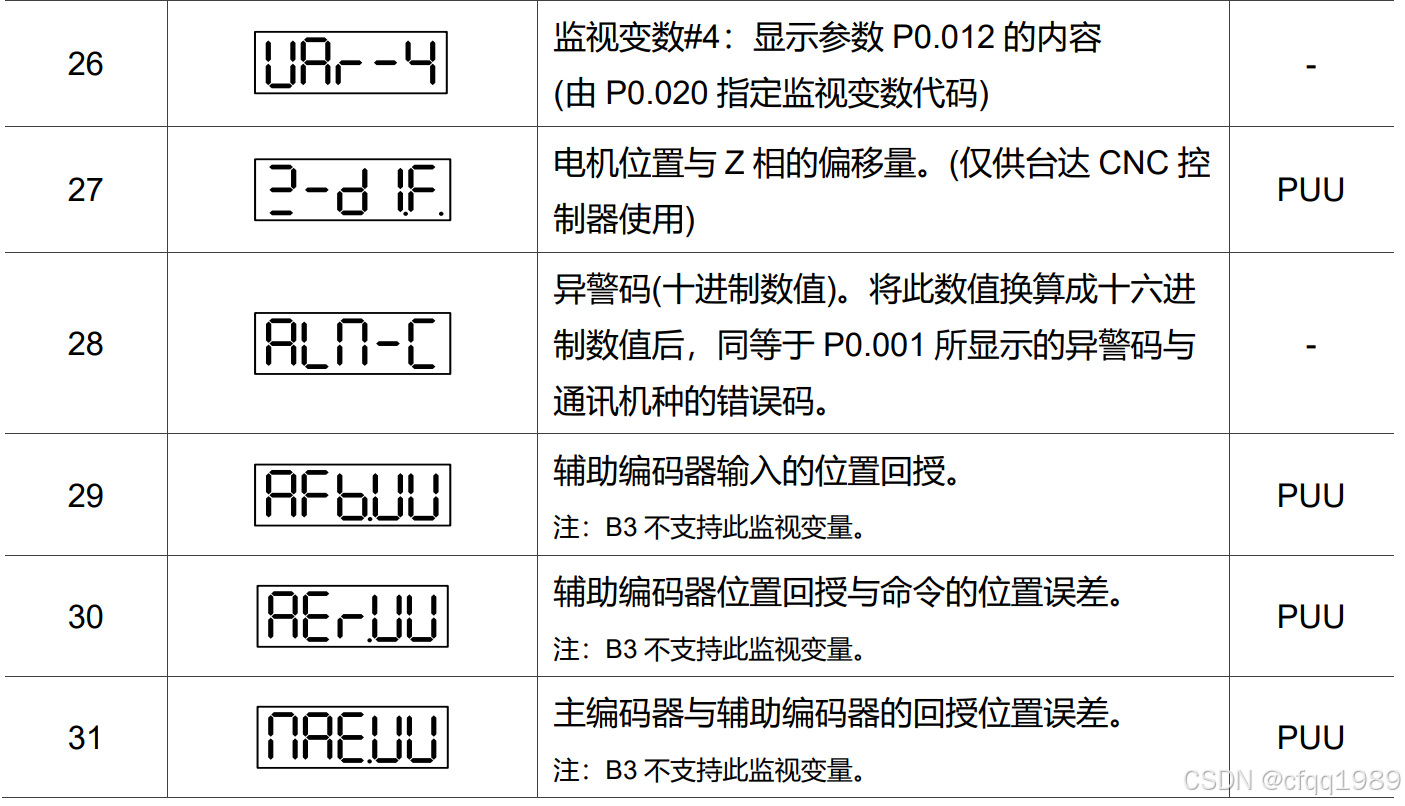
P0-02 LED监视对象
P5-07 PR命令呼叫
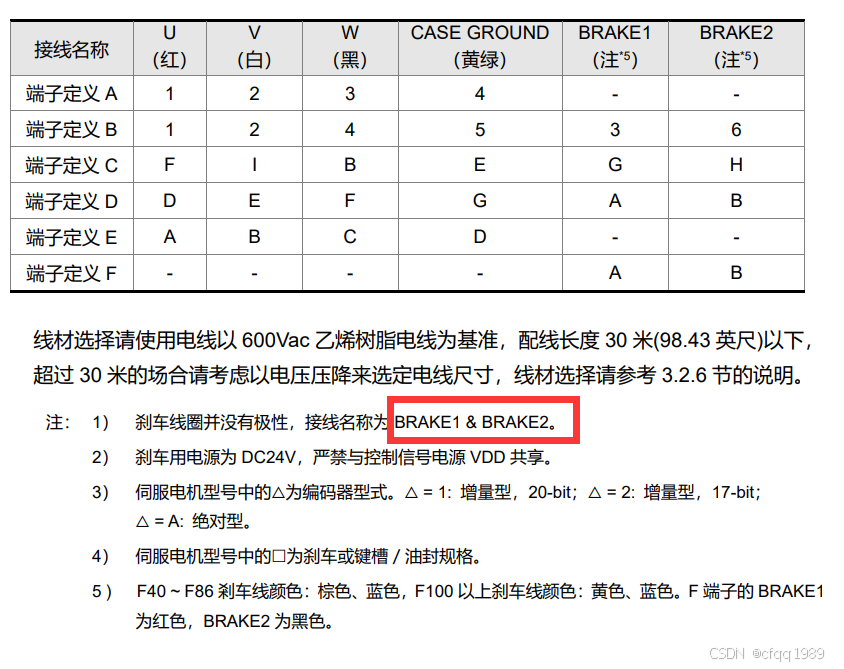
刹车:DO选BRKR功能;P1-42使能son后松刹车,P1-43失能后断刹车24v,P1-38零速
PUU:上位机脉冲数
换电机:P2-08先34后36
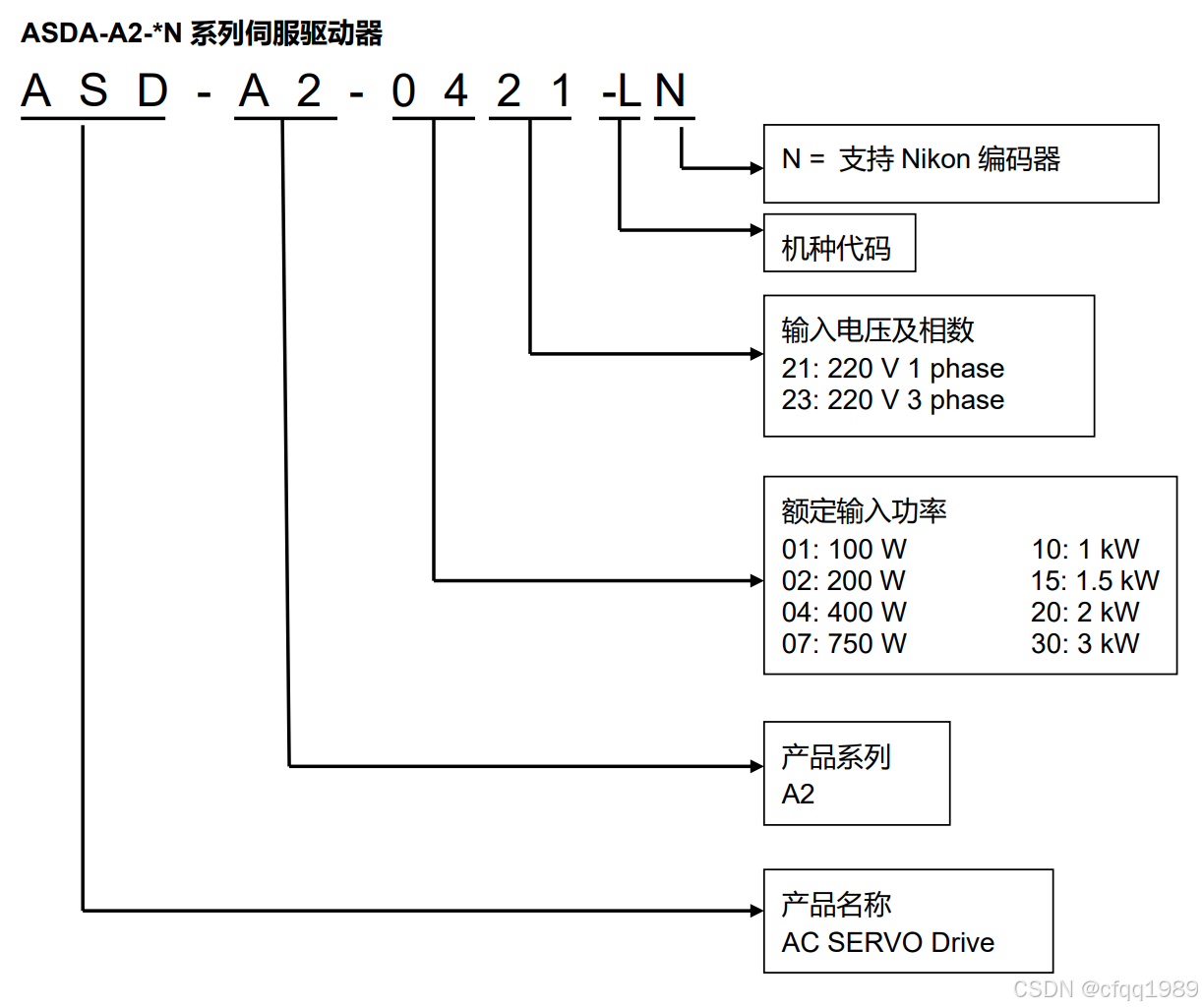
H1-01=【1-100w,2-200w,3-400w,4-700w,5-1kw,6-1.5kw】
刚性:P2-31 值越大,刚性越高
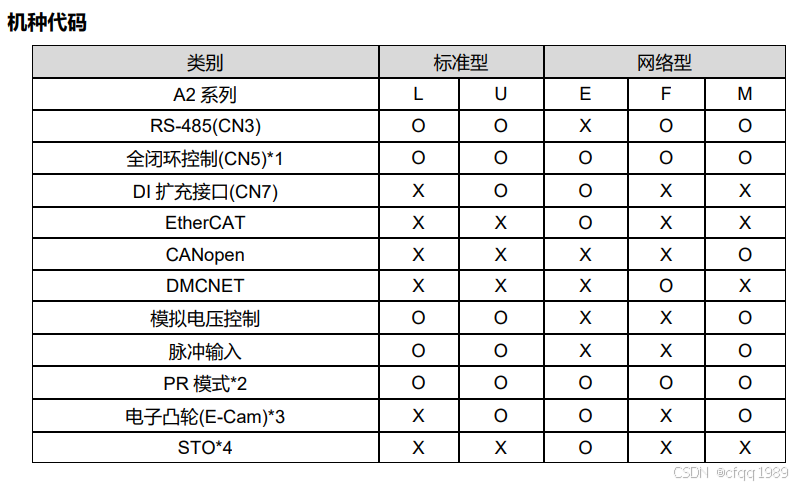
L 外接脉冲
U 在L的基础上增加DI
E ethercat总线 // EN 支持Nikon编码器
F 台达dmcnet
M CANopen总线
P0-08 总工作小时
al500 sto故障
al11 编码器线故障
al04 电机规格错误

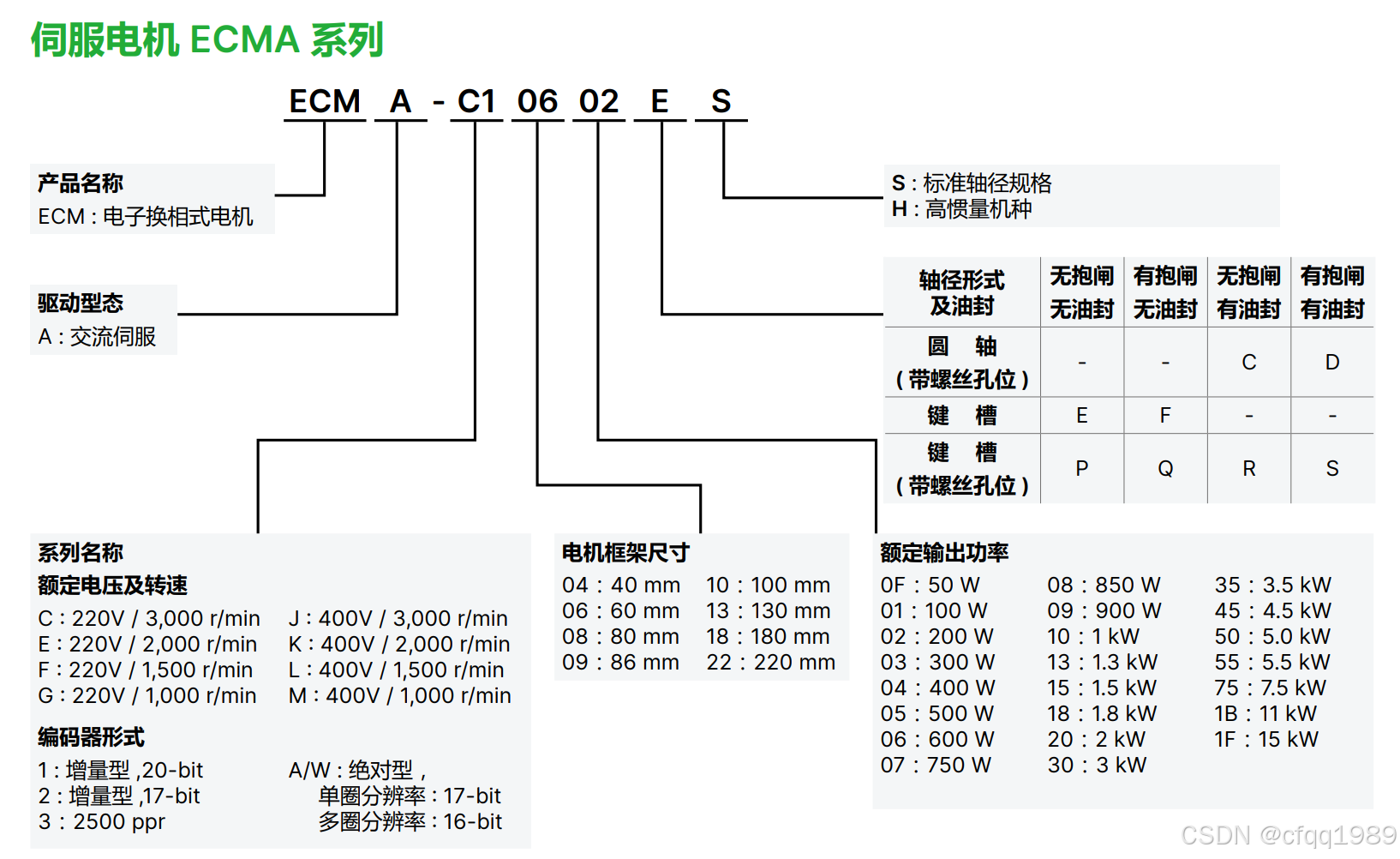
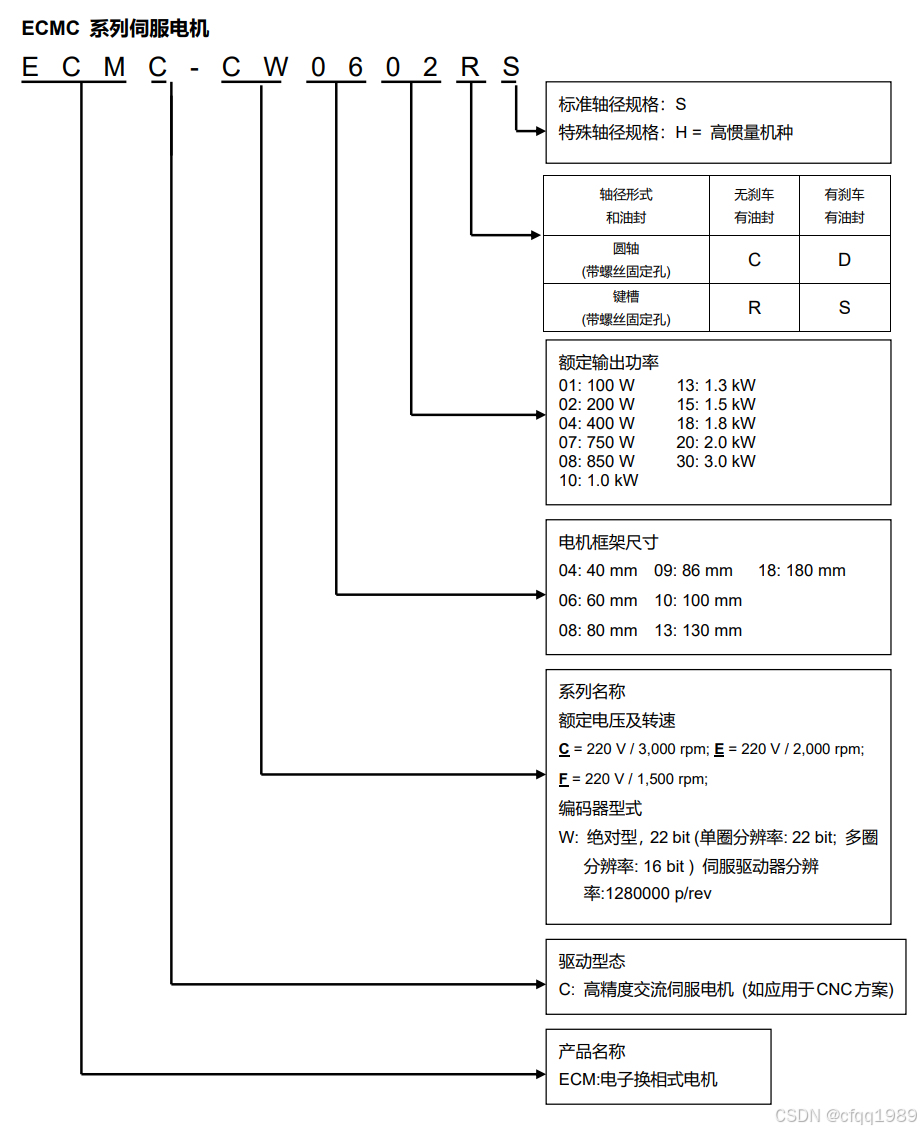
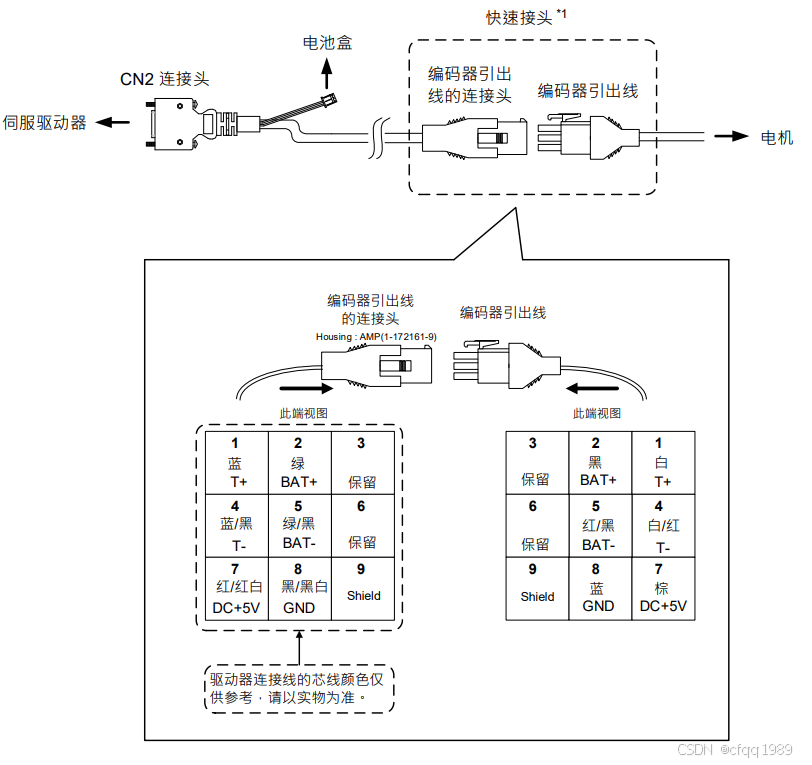
电机:
1 增量20bit
2 增量17bit
A 绝对值 单圈17bit多圈16bit
W 绝对值 单圈22bit多圈16bit
ECMC-CW 0604 SS //适用于CNC方案的电机
ECMA-C A 0604 SS
ECMA-C A 0910 SS
40框 50~100w 0.32N
60框 200~400w 1.27N 轴14mm
80框 400~750w 2.39N 轴19mm
86框 750~1000w 3.18N 轴16mm
100框 1~2kw 6.37N
130框 500~3kw 11.48N
180框 2~7.5kw 47.74N
220框 11~15kw 95.4N

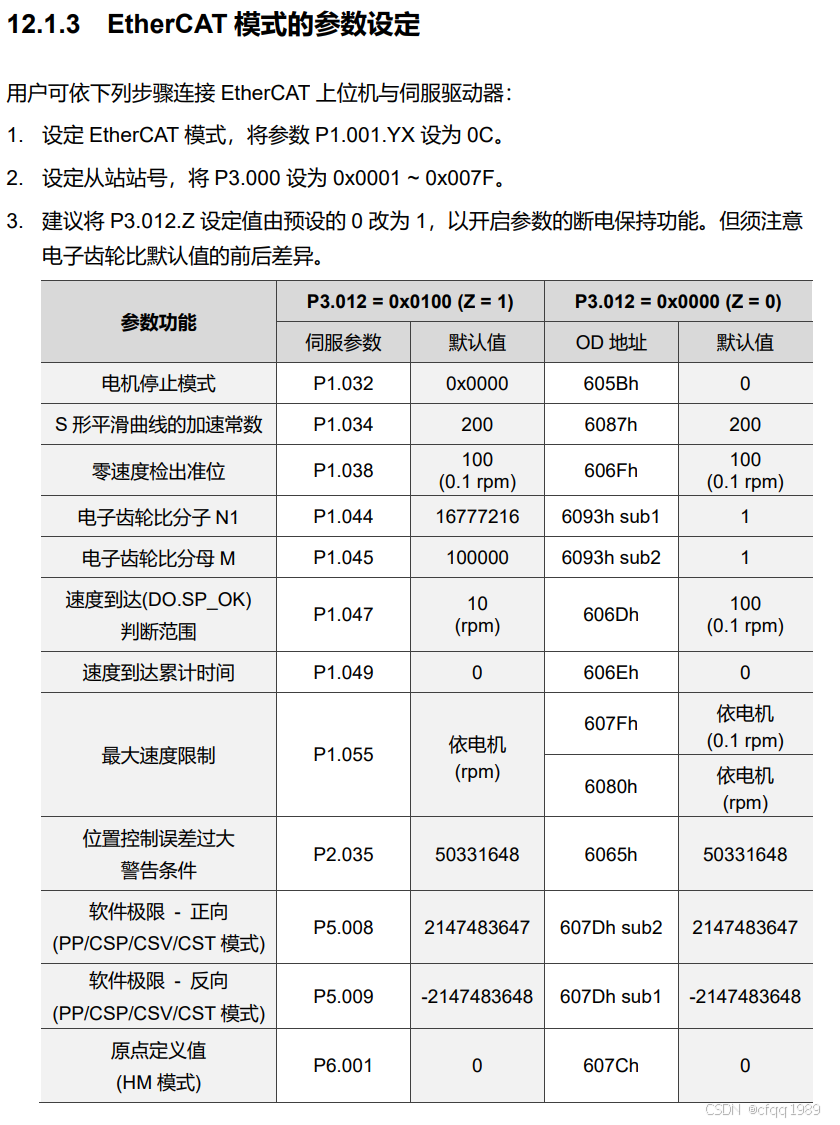
参数:
通讯:
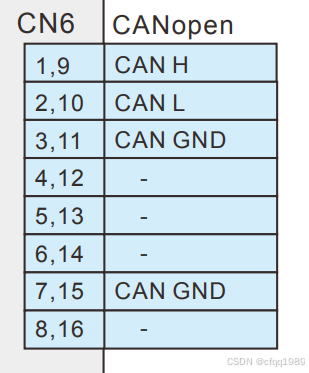
P3.00
P3.01
P3.02
精度:
一圈 128万
模式:
回零:
回零:
同步定位:
同步定位:
力矩:
力矩:
速度:
速度:
PR:内位置64个坐标点
P6-00 定义回零方式
P6-01 参考点偏置
P6-02 路径点1#【加速度】
P6-03 路径点1#【坐标点】
P4-07 DI呼叫PR坐标点
故障码:

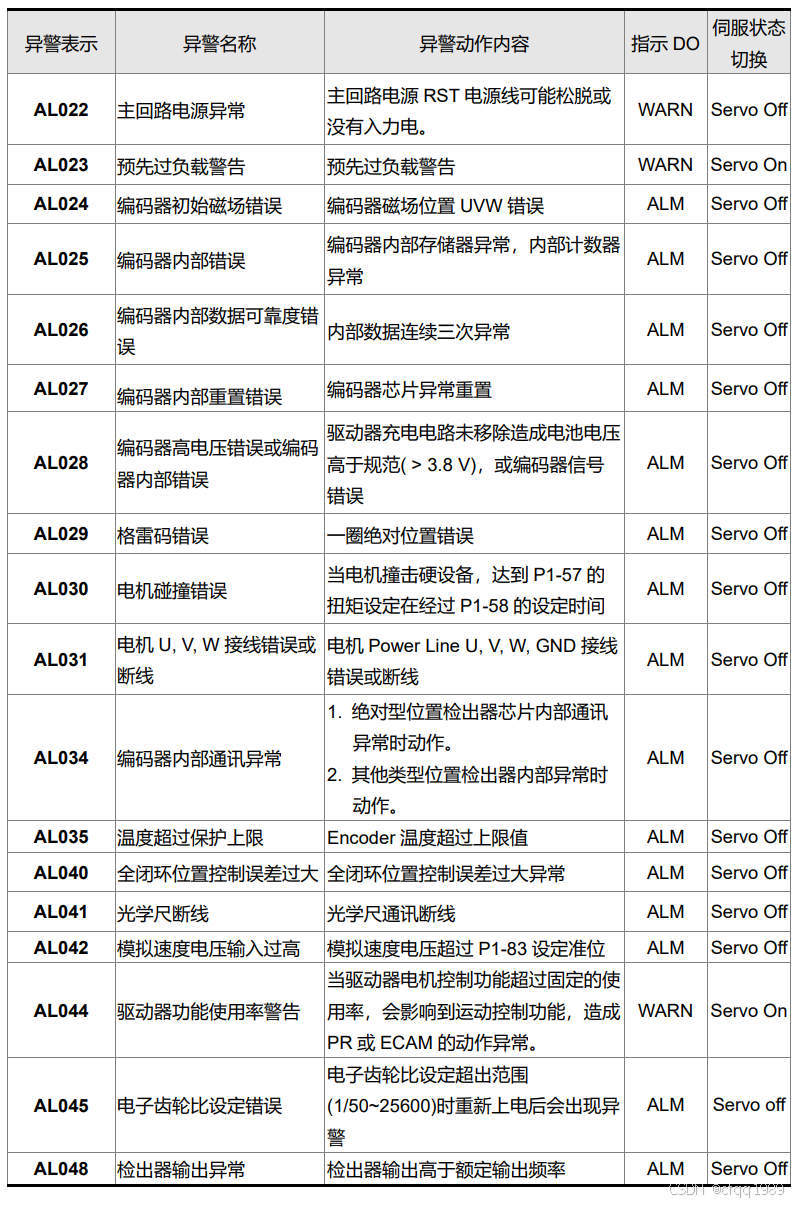
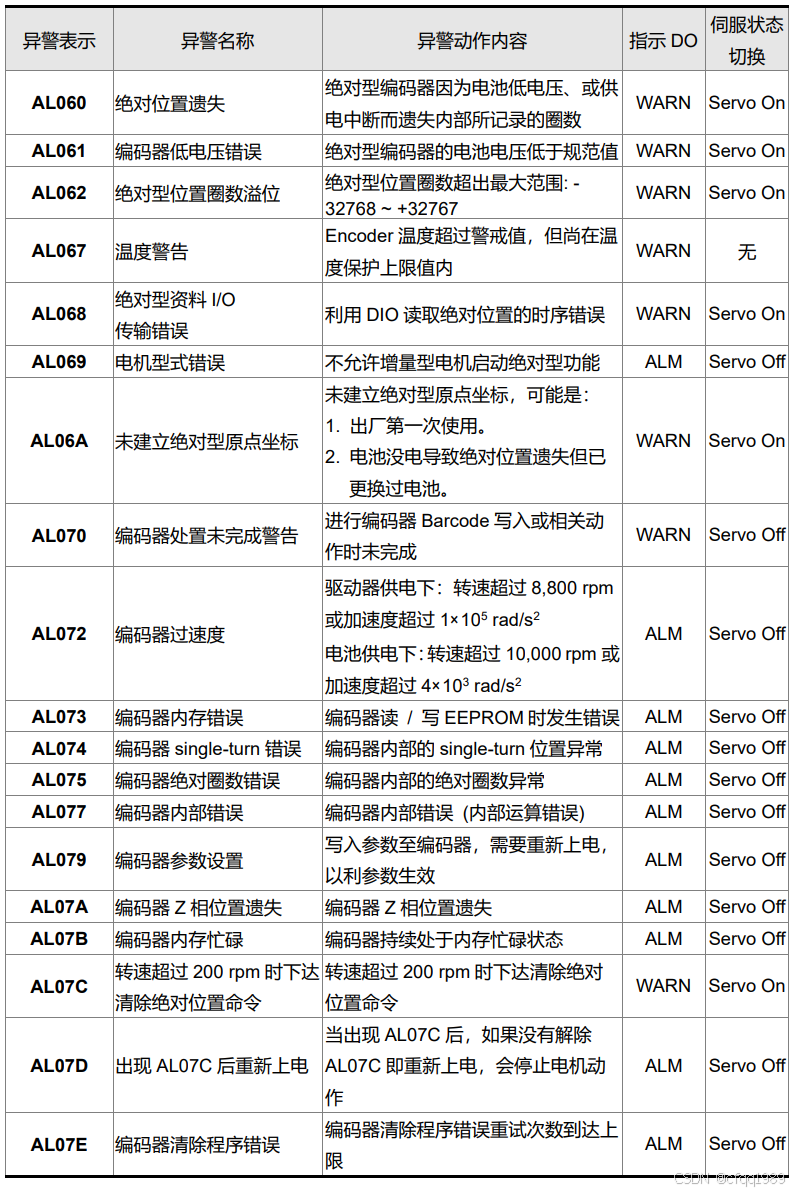
al069 若不使用绝对型功能,请将参数P2-69 设成0。
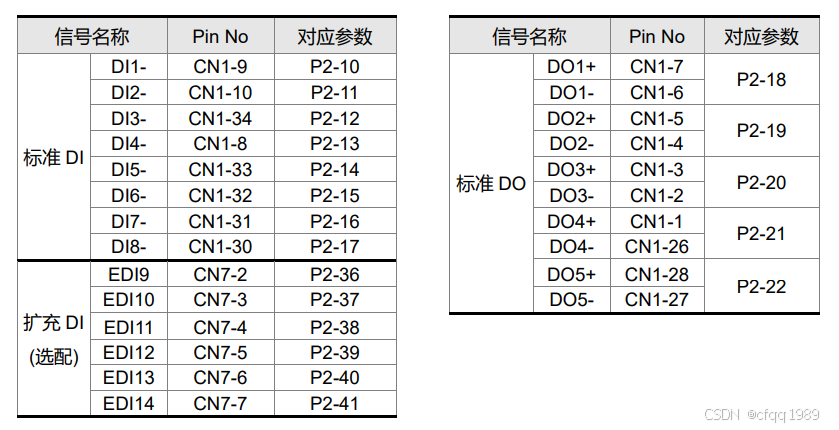
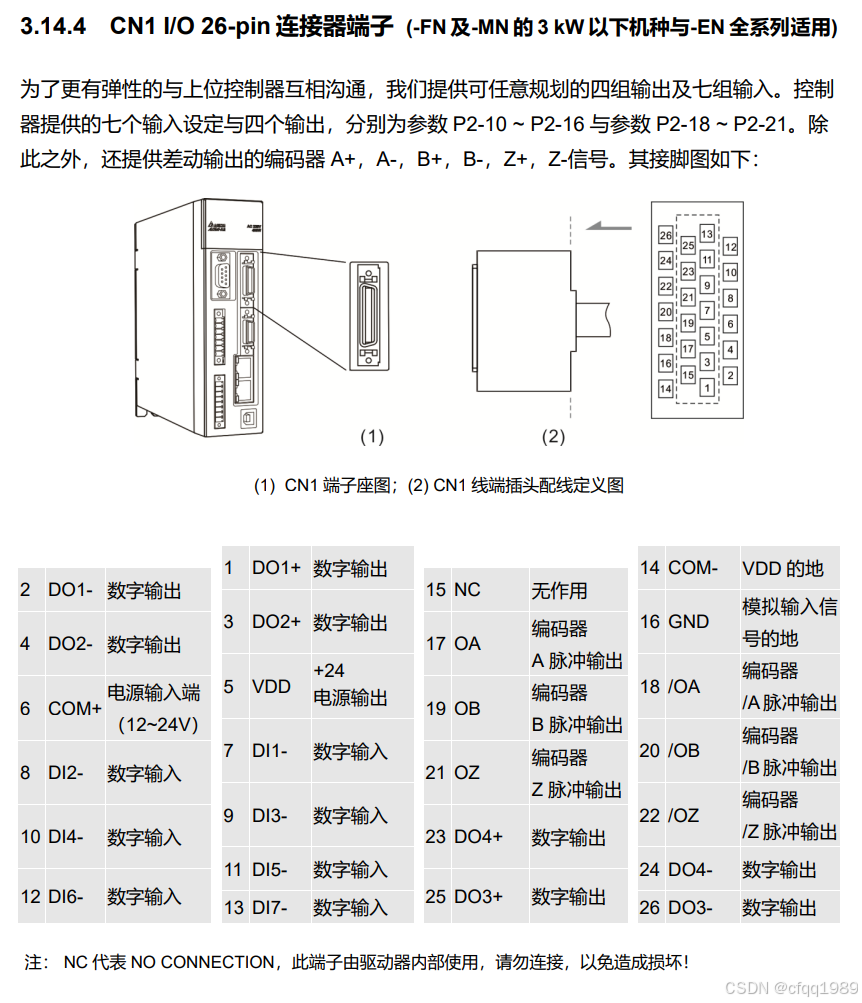
io:
P2-10 DI1 【0x100】常开 P4-07控制内部DI值,P3-06为DI来源
P2-13 DI4 【124】ORGP原点
P2-14 DI5 【122】反限位
P2-15 DI6 【123】正限位
P2-16 DI7 【121】急停 //[021]急停报警
P2-17 DI8
P2-36 DI9
P2-41 DI14
P2-18 DO1 【0x100】常开 P2-08=406强制输出,P4-06给值
P2-19 DO2
P2-22 DO5
P2-30=1 强制伺服使能 // P1-01不能是B【dmcnet】或C【ecat】,可以用A

LED显示:

ECAT:

















 1136
1136

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









