



以车辆主动悬架模糊控制仿真为研究对象,通过Matlab与Simulink联合仿真平台对车辆悬架系统进行建模与仿真分析,探讨主动悬架的控制策略和系统性能,主要研究内容如下:
(1)建立悬架系统动力模型及运动微分方程
本文从车辆动力学和振动力学相关理论出发,结合车辆悬架系统的动态响应,对其进行详细的受力分析。通过构建1/2车的数学模型,分析车辆悬架的受力情况并进行适当简化,分别建立被动悬架和主动悬架的动力学模型。基于模型推导出系统的运动微分方程,为后续的控制策略研究提供理论基础。
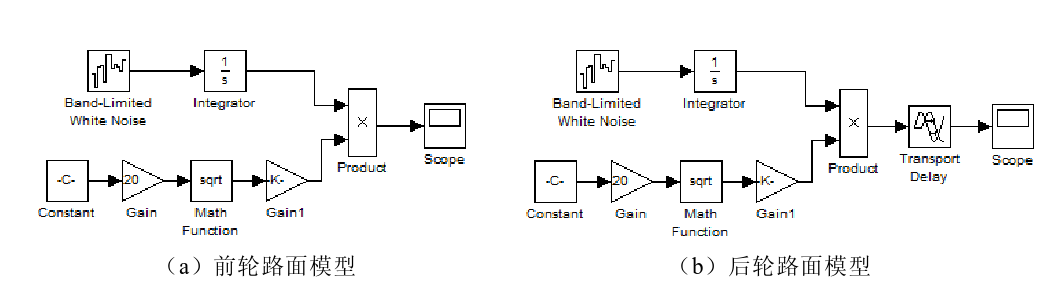
(2)建立随机路面输入模型
根据车辆乘坐舒适性和操纵稳定性的设计要求,确定悬架系统的性能指标,并考虑路面不平度对车辆动态响应的影响。本文基于积分白噪声法,构建了随机路面输入模型,并通过Simulink平台设计出相应的仿真模块,用以模拟真实的路面输入条件,确保车辆在不同路况下的仿真分析精度。
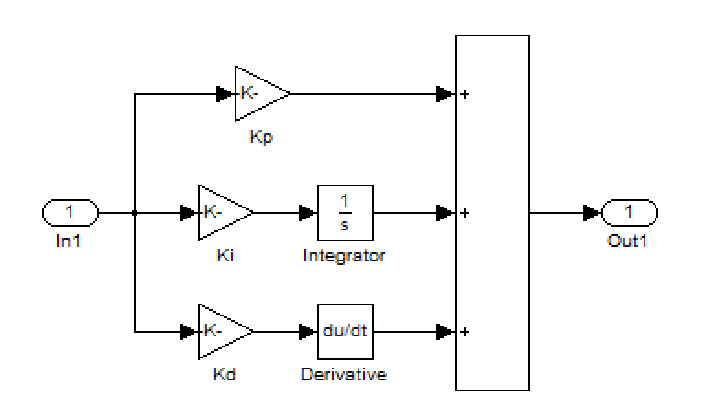
(3)主动悬架控制策略理论研究及控制器设计
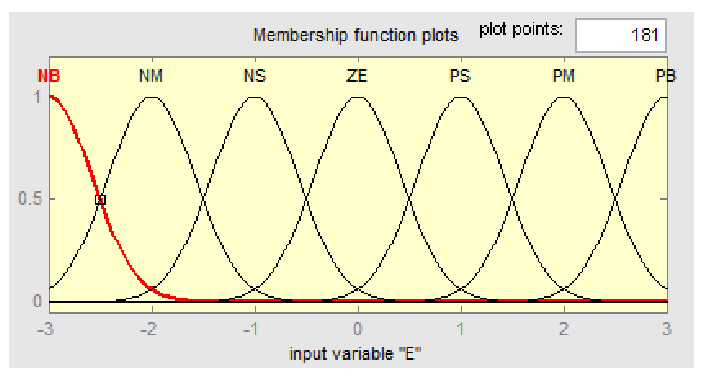
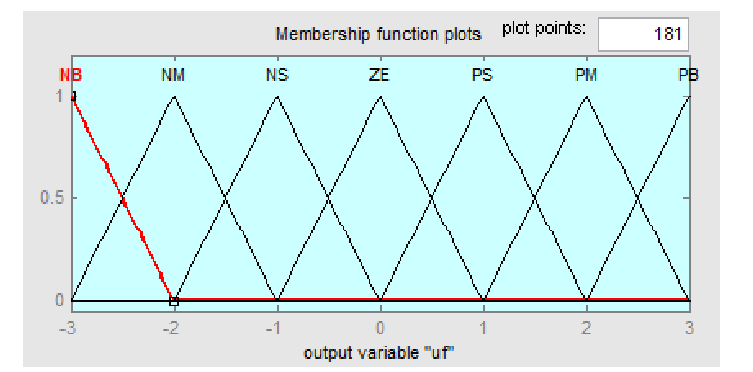
本文重点研究1/2车主动悬架的控制策略。通过对现代控制理论和经典控制理论的分析,分别研究了PID控制、模糊控制以及模糊PID控制的基础理论,并详细讨论了这些控制策略在悬架系统中的应用。为验证各控制策略的效果,本文在Matlab/Simulink中设计了三种控制器的仿真模块,并给出具体的实现方式。
(4)设计系统仿真模型
以四自由度1/2车模型为研究对象,本文基于随机路面输入信号,在Matlab/Simulink中搭建了被动悬架与主动悬架的仿真模块,并引入上述三种控制器,分别建立被动悬架和主动悬架的联合仿真模型,形成完整的悬架控制系统仿真环境,便于对比分析。
(5)仿真结果及分析
本文选取车身垂向振动速度、车身加速度、俯仰角加速度、前后悬架动变形及前后轮动载荷作为悬架系统的输出指标,分别对三种控制策略下的仿真结果进行对比分析。通过对比被动悬架和主动悬架在不同控制策略下的系统性能,总结出各控制策略的控制效果,分析其对乘坐舒适性和操纵稳定性的影响。
创新点:
- 采用模糊控制与传统PID控制相结合的策略,提出了一种改进的模糊PID控制算法,能够在不同路况下自适应调整悬架系统的控制参数,显著提升了车辆的舒适性和稳定性。
- 设计了基于随机路面输入的仿真模型,通过Matlab/Simulink平台构建完整的主动悬架系统仿真框架,综合分析了不同控制策略对车辆动力学性能的影响。
路面不平整度
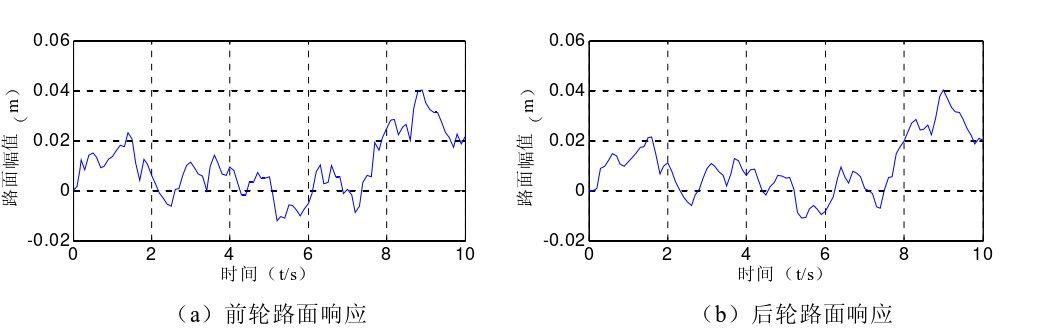
仿真结果:


















 160
160

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











