







✅ 博主简介:擅长数据搜集与处理、建模仿真、程序设计、仿真代码、论文写作与指导,毕业论文、期刊论文经验交流。
✅ 具体问题可以私信或扫描文章底部二维码。
(1)RFID技术与防碰撞问题概述 物联网的快速发展使得RFID射频识别技术成为其中的关键技术之一。RFID技术通过无线通信实现对物体的识别和数据传输,具有非接触式识别、快速读取、高容量存储等优点,广泛应用于物流、零售、医疗、交通等领域。然而,RFID系统在实际应用中面临诸多技术挑战,其中标签碰撞问题尤为突出。标签碰撞是指多个标签同时响应读写器的查询请求,导致信号冲突,使得读写器无法准确识别标签信息。碰撞问题不仅降低了系统的识别效率,还可能增加系统的能耗
。因此,研究有效的防碰撞算法对于提高RFID系统的性能至关重要。
(2)RFID多标签防碰撞算法研究 RFID系统中的防碰撞算法主要分为两大类:随机访问算法和确定性算法。随机访问算法以ALOHA算法为代表,包括纯ALOHA算法、时隙ALOHA算法和动态帧时隙ALOHA算法。这些算法通过随机分配时隙来减少标签之间的碰撞概率
。然而,随机访问算法在面对大量标签时,容易出现时隙浪费和吞吐量不稳定的问题。确定性算法则以二进制树搜索算法为代表,通过有序划分标签组,逐步缩小搜索范围,最终识别出所有标签。二进制树搜索算法是一种确定性算法,能够保证在有限步骤内识别所有标签,但其效率受到查询指令长度和搜索路径选择的影响
。
(3)改进的二进制树搜索防碰撞算法 本文提出了一种改进的二进制树搜索防碰撞算法,旨在提高RFID系统的识别效率和吞吐率。该算法基于退避式二叉树搜索,主要从两个方面进行改进:一是缩短每次发送的查询指令长度,二是根据碰撞位信息自适应选择搜索树路径。在传统二进制树搜索算法中,读写器需要发送完整的标签ID码来识别标签,这增加了数据传输量和查询时间
。本文提出的算法通过使用二进制编码表示碰撞位信息,减少了每次查询所需传输的数据量。此外,算法还引入了自适应机制,根据碰撞位的连续性动态选择二叉树或四叉树进行搜索。当碰撞位连续时,采用四叉树搜索可以更快地缩小搜索范围,减少查询次数;当碰撞位不连续时,采用二叉树搜索则更为稳健。通过这种方式,算法能够在不同场景下灵活调整搜索策略,显著提高系统的吞吐率
。
通过MATLAB软件仿真对改进后的算法进行了验证和分析。仿真结果表明,新算法在数据传输量、查询次数和系统吞吐率三个方面均优于现有的几种常见防碰撞算法
。具体来说,新算法通过减少查询指令长度和优化搜索路径,显著降低了数据传输量和查询次数,从而提高了系统的整体性能。此外,新算法的自适应机制使其能够更好地应对不同数量的标签碰撞情况,尤其在标签数量较多时,其优越性更为明显
% MATLAB代码:改进的二进制树搜索防碰撞算法仿真
% 初始化参数
num_tags = 100; % 标签数量
tag_ids = randi([1000, 9999], 1, num_tags); % 随机生成标签ID
query_length = 4; % 查询指令长度
tree_type = 'binary'; % 默认使用二叉树搜索
% 仿真过程
recognized_tags = []; % 已识别标签列表
remaining_tags = tag_ids; % 未识别标签列表
while ~isempty(remaining_tags)
% 发送查询指令
query_bits = remaining_tags(1, 1:query_length);
response_tags = remaining_tags(ismember(remaining_tags(1:query_length), query_bits, 'rows'), :);
% 检测碰撞
if length(response_tags) == 1
% 无碰撞,识别标签
recognized_tags = [recognized_tags, response_tags];
remaining_tags(ismember(remaining_tags, response_tags, 'rows'), :) = [];
else
% 发生碰撞,选择搜索树类型
if length(response_tags) > 10 && tree_type == 'binary'
tree_type = 'quaternary'; % 切换到四叉树搜索
elseif length(response_tags) <= 10 && tree_type == 'quaternary'
tree_type = 'binary'; % 切换回二叉树搜索
end
% 根据树类型继续搜索
if tree_type == 'binary'
% 二叉树搜索
remaining_tags = response_tags;
query_length = query_length + 1;
else
% 四叉树搜索
remaining_tags = response_tags;
query_length = query_length + 2;
end
end
end
% 输出结果
disp('所有标签已识别:');
disp(recognized_tags);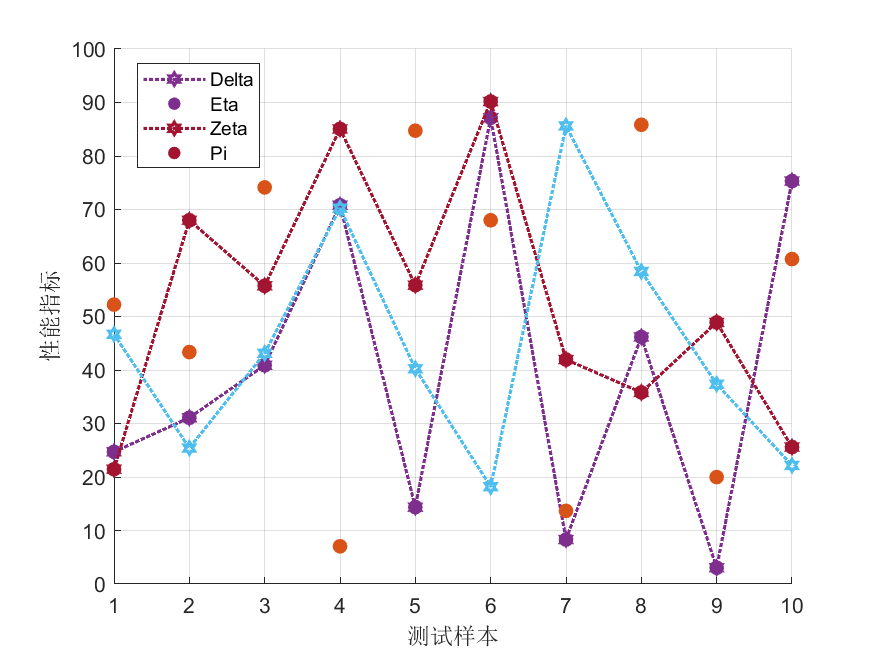


















 491
491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











