









 模糊自适应PID控制结合了模糊控制的动态性和鲁棒性以及PID控制的精确性,常用于工业控制。它通过模糊规则调整PID参数,以适应系统变化。输入变量先模糊化,然后进行模糊推理得到输出,最后解模糊得到确定控制量。在实际应用中,如智能小车控制,会根据偏差和变化率调整比例、积分系数,以优化控制效果。MATLAB仿真可用于验证和优化控制策略。
模糊自适应PID控制结合了模糊控制的动态性和鲁棒性以及PID控制的精确性,常用于工业控制。它通过模糊规则调整PID参数,以适应系统变化。输入变量先模糊化,然后进行模糊推理得到输出,最后解模糊得到确定控制量。在实际应用中,如智能小车控制,会根据偏差和变化率调整比例、积分系数,以优化控制效果。MATLAB仿真可用于验证和优化控制策略。
专有名词
| 名词 | 解释 |
|---|---|
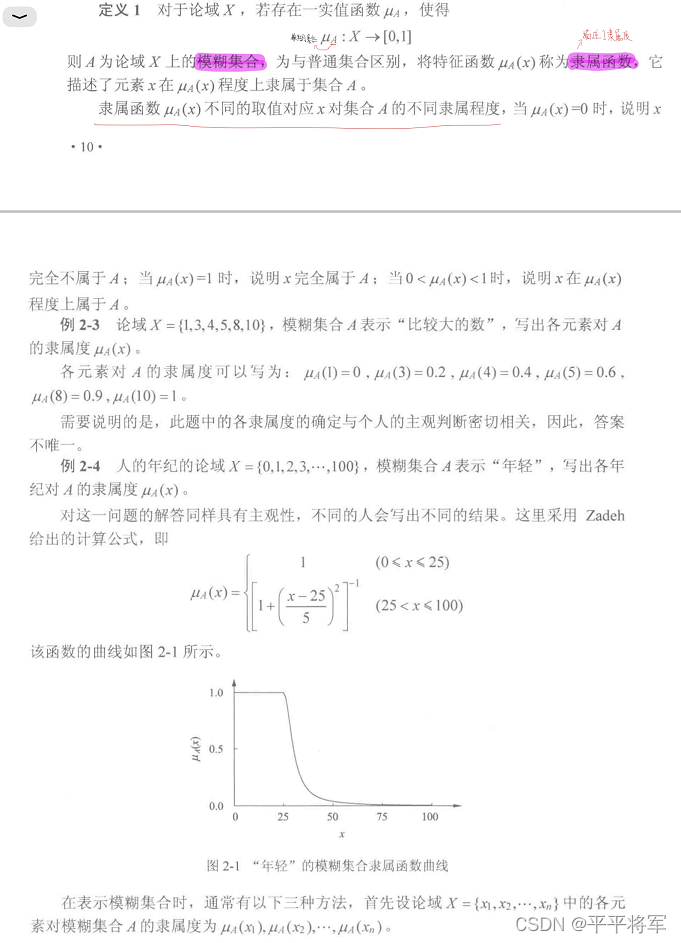
| 模糊控制 | 模糊控制概括来讲就是以人为控制经验作为规则,以模糊逻辑、模糊集合等作为算法基础的智能控制。模糊控制首先需要将输入变量模糊化,依据所建立的模糊规则进行模糊推理得到模糊输出,然后将模糊推理进行解模糊即得到确定的输出量。 |
| 论域 | 任何科学理论都有它的研究对象,这些对象构成一个不空的集合,称为论域。 |
| 模糊集合 | 模糊集合是用来表达模糊性概念的集合。 又称模糊集、模糊子集。普通的集合是指具有某种属性的对象的全体。比如说体重偏胖,这样的一个集合就是模糊集合 |
| 特征函数 | 完全定义了随机变量概率分布的函数。 |
模糊自适应PID控制原理
1、介绍
- 模糊PID控制具有多种形式:模糊自适应PID控制、引入积分因子的模糊PID控制和模糊PID开关切换控制等.其中通过建立模糊规则从而实现PID参数的自适应调整的方法称为模糊自适应PID控制,该方法结合了模湖控制的动态性和鲁棒性,并且兼具PID控制的精确性,因此广泛应用于工业控制中。
- 模糊控制概括来讲就是以人为控制经验作为规则,以模糊逻辑、模糊集合等作为算法基础的智能控制。
- 模糊控制首先需要将输入变量模糊化,依据所建立的模糊规则进行模糊推理得到模糊输出,然后将模糊推理进行解模糊即得到确定的输出量。
2、参数设置
- 当偏差e数值较大,而且和偏差变化率ec符号一致,说明系统误差还在增大,被控量正在远离给定值,为了加快系统响应速度,增强调节效果,应当增大比例系数,同时为了防止积分饱和引起较大超调,当偏差数值较大时应当减小积分作用,即降低积分系数,可以将设为0,如果同时设置积分系数初始值为0,此时相当于积分分离PI控制器。
- 当偏差和偏差变化率符号相异时,说明被控量向给定值靠近,此时可以适当减小以防止超调出现。当系统偏差数值较小时,为减小系统静差,要加大积分系数,并且为保持系统具有较好的带载能力,应适当选择一数值。根据直线电机伺服系统PI控制器的调节原则。模糊控制器为双输入,每个输入量有7个等级,输出和分别有49条规则,采用Mamdani推理算法,制定和模糊规则如表所示。解模糊(去模糊)方法采用加权平均法,也称为面积重心法。
例子1
模糊自适应的PID控制器——通俗易懂的解释
这是一个智能小车的例子,直线行驶。偏离中线值为E,这次与上次的偏差变化值EC(有的也用变化率,都可以)。
- 假设该区间为-240到240,即小车偏离中线的最大距离为240,正负即为左右。再假设中线偏差变化率的可行区间为-40到+40。
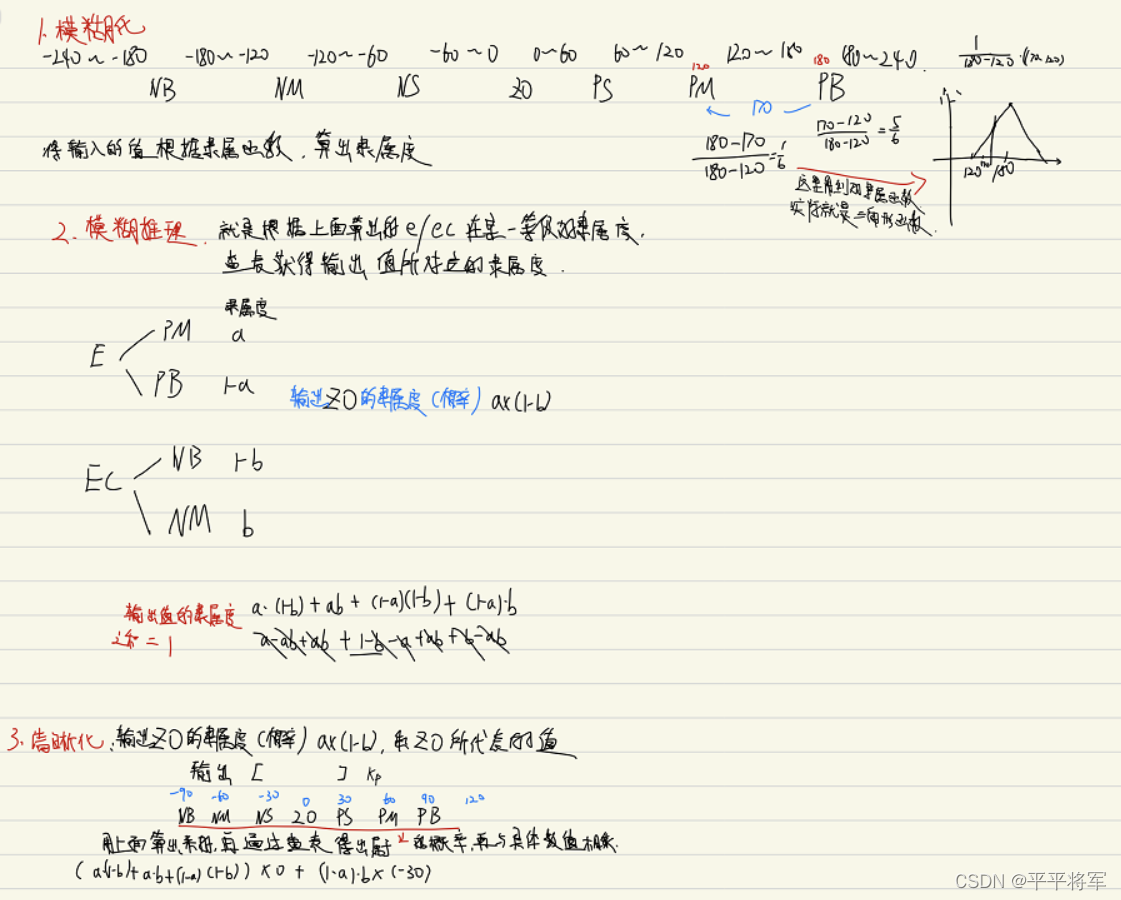
- 将-240到240,分为8个部分,-180,-120,-60,0,60,120,180分别用NB,NM,NS,ZO,PS,PM,PB表示(个人理解N为negative,P为positive,B为big,M为middle,S为small,ZO为zero)。
- 将输入值E(假设为170)进行模糊化,也就是隶属度计算。也就是其分别归属于PM和PB的程度(当为180时就是完全隶属与PB了)。
- 模糊推理:就是根据模糊化后出来的隶属度值,计算概率。比如ZO的概率就是ax(1-b)+ab+(1-a)x(1-b).
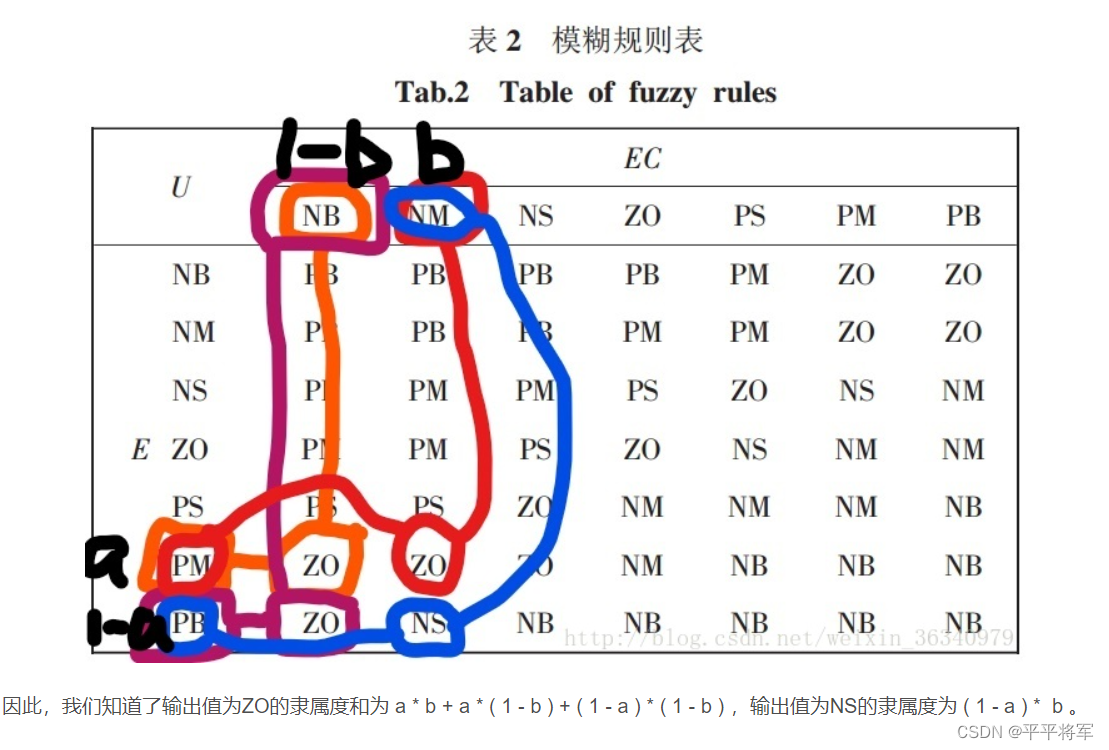
- 清晰化:对于输出值,我们同样采用给予隶属度的办法。例如,我们把输出值假设为[1000,1400](即舵机的摆角值范围)的区间同样划分为八个部分,即7个隶属值NB,NM,NS,ZO,PS,PM,PB。根据上一步所得出的结论,我们就可以用隶属度乘以相应的隶属值算出输出值的解,即 (a * b + a * ( 1 - b ) + ( 1 - a ) * ( 1 - b ) ) * ZO + ( 1 - a ) * b * NS。
- 到此为止,整个模糊过程就结束了。
MATLAB仿真
参考资料
模糊自适应的PID控制器——通俗易懂的解释
实际算法
[1]王利. 现代直线电机关键控制技术及其应用研究[D].浙江大学,2012.



















 674
674

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











