






 本文介绍了如何在Ubuntu系统中配置和使用Kinova的Gen2和Gen3机械臂的ROS包。针对Gen2,详细说明了SDK安装过程,提供了启动命令示例,并分享了遥控器使用和aruco码抓取的视频资源。对于Gen3,提到了环境配置中的conan版本问题和启动注意事项,还展示了与宇树B1机器狗的集成应用。
本文介绍了如何在Ubuntu系统中配置和使用Kinova的Gen2和Gen3机械臂的ROS包。针对Gen2,详细说明了SDK安装过程,提供了启动命令示例,并分享了遥控器使用和aruco码抓取的视频资源。对于Gen3,提到了环境配置中的conan版本问题和启动注意事项,还展示了与宇树B1机器狗的集成应用。
kinova国内使用较多产品为gen2,gen3
官网:Together in robotics | Kinova (kinovarobotics.com)
github(gen2):GitHub - Kinovarobotics/kinova-ros: ROS packages for Jaco2 and Mico robotic arms
github(gen3):
GitHub - Kinovarobotics/ros_kortex: ROS packages for KINOVA® KORTEX™ robotic arms
GitHub - Kinovarobotics/ros_kortex_vision: ROS package for KINOVA® KORTEX™ arms vision module
Gen2:
gen2为kinova早期产品,使用前需要安装SDK,包装箱中会有一个u盘,有window和Linux驱动,实测其Ubuntu16.04的sdk,在18.04也适用,可按照readme步骤安装。
支持版本:

配置步骤根据git上步骤来即可
主要注意机械臂型号不要写错即可(此处使用usb接口连接,网口连接控制后续再写)
示例启动命令:
roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2n6s300启动的是j2(jaco2机械臂)n(腕部关节类型)6(6轴)s3(3指夹爪)00
对应如果是圆形腕部7轴2指,则型号应该为j2s7s200,启动命令:
roslaunch kinova_bringup kinova_robot.launch kinova_robotType:=j2s7s200遥控使用视频:
kinova gen2 遥控使用说明_哔哩哔哩_bilibili
aruco码抓取视频:
kinova gen2 aruco码抓取记录_哔哩哔哩_bilibili
GEN3:
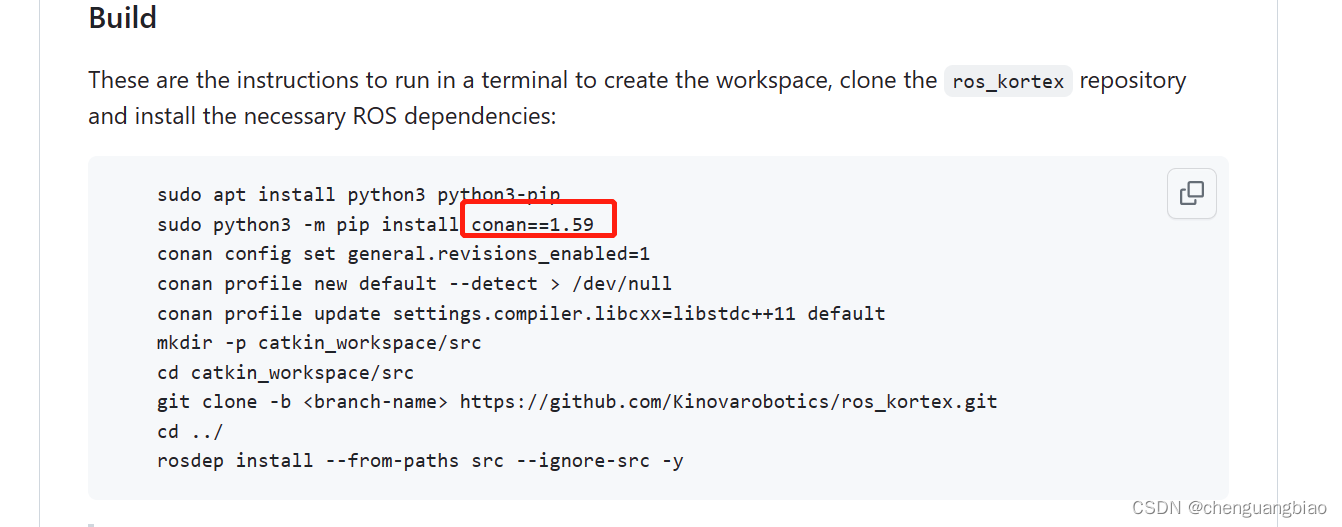
配置步骤根据git上步骤来即可,需要注意的是配置环境时,conan版本的问题,可能版本更替过后github更新不及时,导致环境配置错误。
启动命令位于二级目录kortex_driver下:

其次,使用GEN3时,需要注意的点是,按下电源键2-3秒后,电源指示灯会亮一下然后熄灭,此时已经上电,不要重复按开关,等待15s左右,机械臂会启动完成。因长按电源10s为复位,由此可能会有配置的ip重置,导致使用设置好的ip无法连接机械臂的问题。
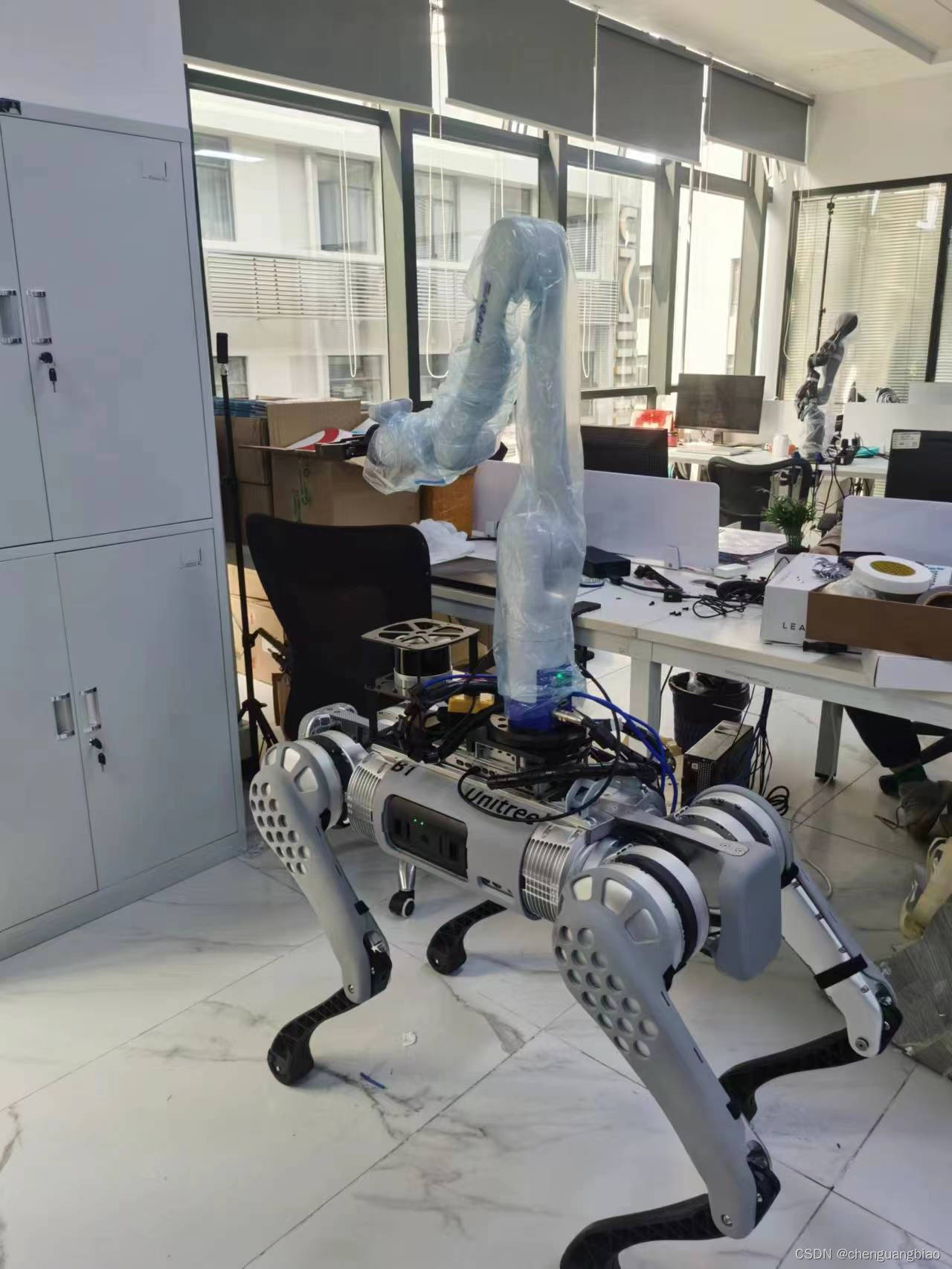
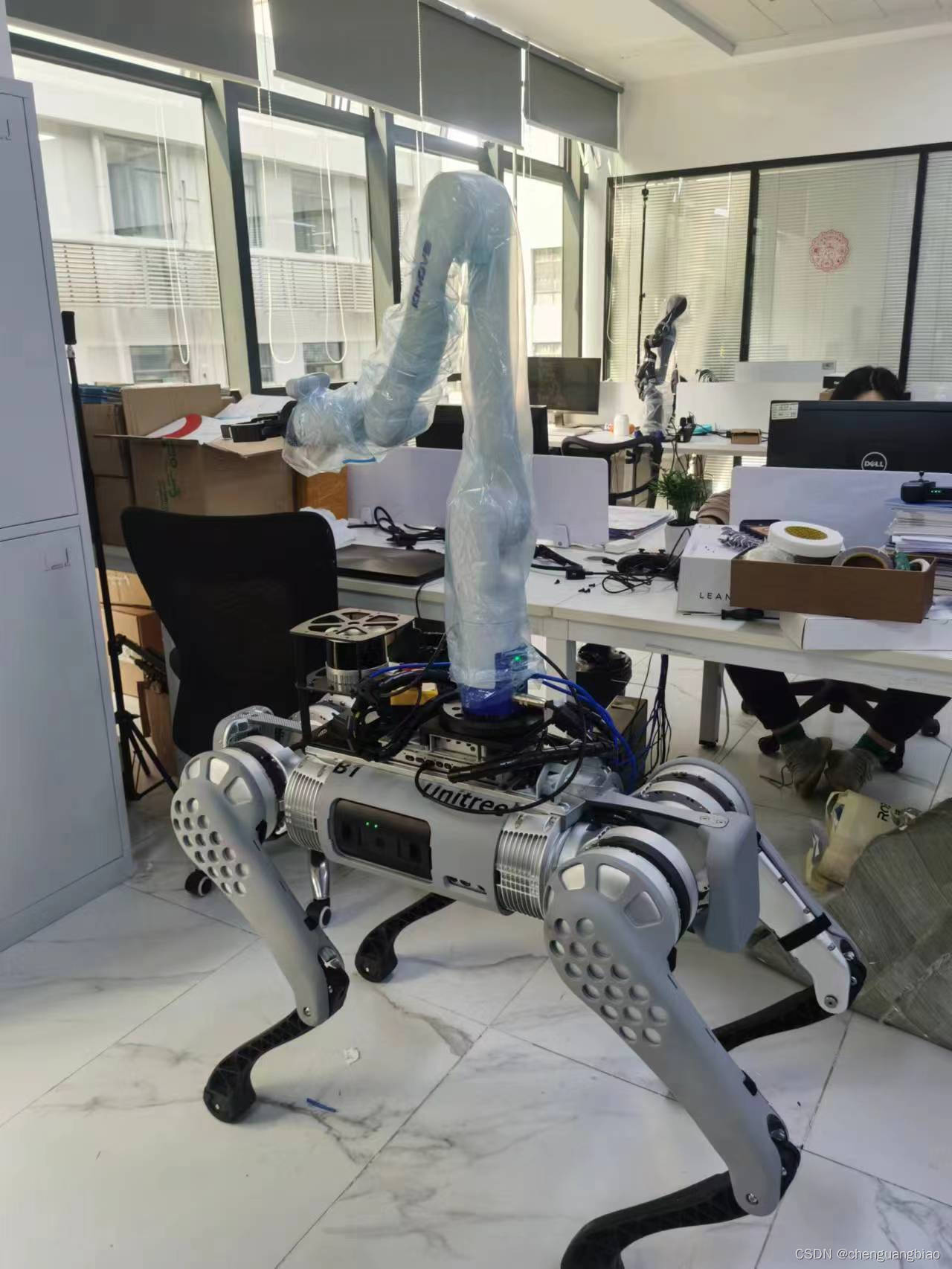
附一张使用宇树B1机器狗与Gen3的复合图:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









