






- 首先我们需要下载
- sduo apt install libcurl3 libcurl4-openssl-dev
- sudo apt install libjsoncpp0 libjsoncpp-dev
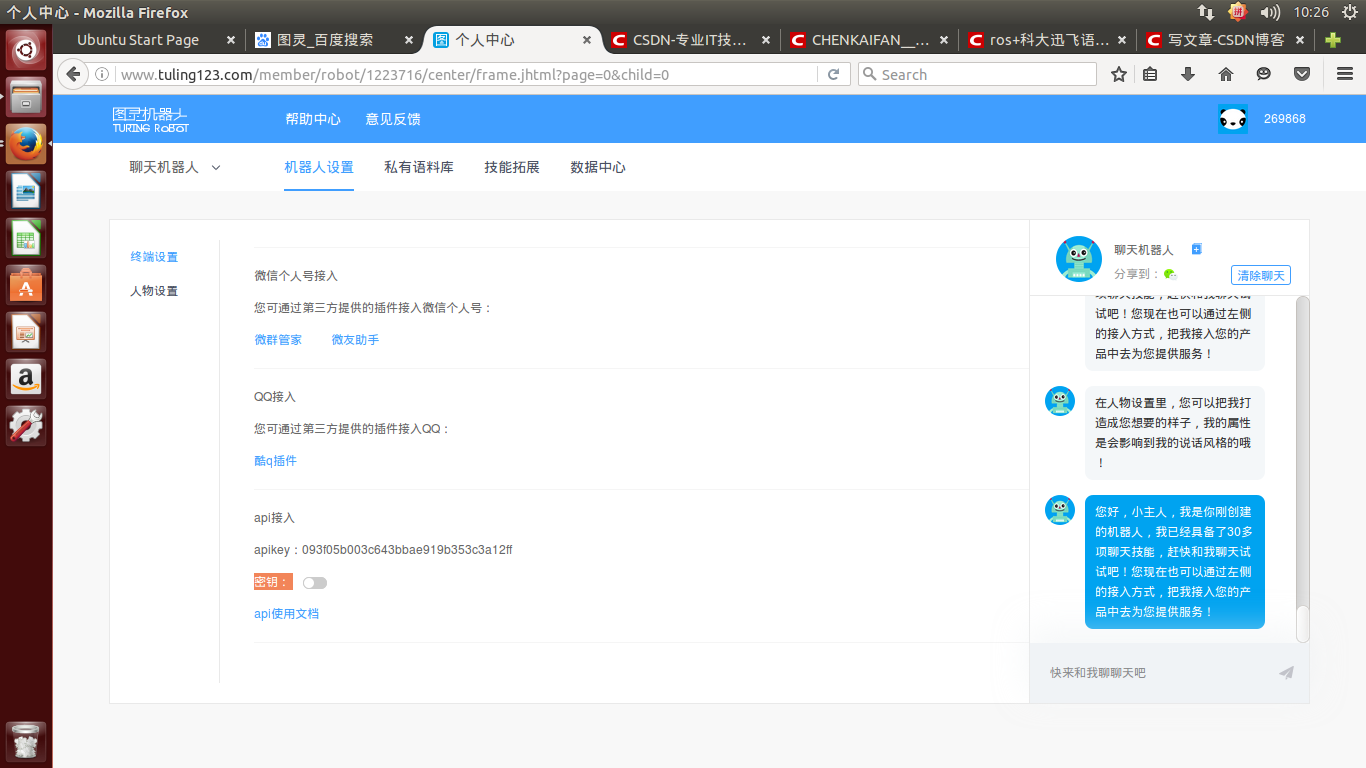
- 然后到图灵的官网(http://www.tuling123.com/)申请一个帐号 ,申请完后,需要创建一个机器人,我这里的机器人叫”聊天机器人“,创建好后你会获得一个密匙,我们需要把密匙后的开关关掉,不然等下会出错
- 在vioce_system 包中的src文件夹下创建一个tuling_nlu.cpp文件
- 以下是tuling_nlu.cpp的内容(注意,需要把代码中的key改为自己创建机器人的key,把 curl_easy_setopt(pCurl, CURLOPT_URL, "http://openapi.tuling123.com/openapi/api");
中的网址改为自己机器人的接口地址,这个地址可以在机器人的api文档中找到) #include<ros/ros.h> #include<std_msgs/String.h> #include<iostream> #include<sstream> #include<jsoncpp/json/json.h> #include<curl/curl.h> #include<string> #include<exception> using namespace std; int flag = 0; string result; int writer(char *data, size_t size, size_t nmemb, string *writerData) { unsigned long sizes = size * nmemb; if (writerData == NULL) return -1; writerData->append(data, sizes); return sizes; } int parseJsonResonse(string input) { Json::Value root; Json::Reader reader; bool parsingSuccessful = reader.parse(input, root); if(!parsingSuccessful) { std::cout<<"!!! Failed to parse the response data"<< std::endl; return -1; } const Json::Value code = root["code"]; const Json::Value text = root["text"]; result = text.asString(); flag = 1; std::cout<< "response code:" << code << std::endl; std::cout<< "response text:" << result << std::endl; return 0; } int HttpPostRequest(string input) { string buffer; std::string strJson = "{"; strJson += "\"key\" : \"093f05b003c643bbae919b353c3a12ff\","; //双引号前加/防转仪 strJson += "\"info\" : "; strJson += "\""; strJson += input; strJson += "\""; strJson += "}"; std::cout<<"post json string: " << strJson << std::endl; try { CURL *pCurl = NULL; CURLcode res; // In windows, this will init the winsock stuff curl_global_init(CURL_GLOBAL_ALL); // get a curl handle pCurl = curl_easy_init(); if (NULL != pCurl) { // 设置超时时间为10秒 curl_easy_setopt(pCurl, CURLOPT_TIMEOUT, 10); // First set the URL that is about to receive our POST. // This URL can just as well be a // https:// URL if that is what should receive the data. curl_easy_setopt(pCurl, CURLOPT_URL, "http://openapi.tuling123.com/openapi/api"); //curl_easy_setopt(pCurl, CURLOPT_URL, "http://192.168.0.2/posttest.cgi"); // 设置http发送的内容类型为JSON curl_slist *plist = curl_slist_append(NULL,"Content-Type:application/json;charset=UTF-8"); curl_easy_setopt(pCurl, CURLOPT_HTTPHEADER, plist); // 设置要POST的JSON数据 curl_easy_setopt(pCurl, CURLOPT_POSTFIELDS, strJson.c_str()); curl_easy_setopt(pCurl, CURLOPT_WRITEFUNCTION, writer); curl_easy_setopt(pCurl, CURLOPT_WRITEDATA, &buffer); // Perform the request, res will get the return code res = curl_easy_perform(pCurl); // Check for errors if (res != CURLE_OK) { printf("curl_easy_perform() failed:%s\n", curl_easy_strerror(res)); } // always cleanup curl_easy_cleanup(pCurl); } curl_global_cleanup(); } catch (std::exception &ex) { printf("curl exception %s.\n", ex.what()); } if(buffer.empty()) { std::cout<< "!!! ERROR The Tuling sever response NULL" << std::endl; } else { parseJsonResonse(buffer); } return 0; } void arvCallBack(const std_msgs::String::ConstPtr &msg) { std::cout<<"your quesion is: " << msg->data << std::endl; HttpPostRequest(msg->data); } int main(int argc, char **argv) { ros::init(argc, argv,"tuling_nlu_node"); ros::NodeHandle nd; ros::Subscriber sub = nd.subscribe("voice/tuling_nlu_topic", 10, arvCallBack); ros::Publisher pub = nd.advertise<std_msgs::String>("/voice/xf_tts_topic", 10); ros::Rate loop_rate(10); while(ros::ok()) { if(flag) { std_msgs::String msg; msg.data = result; pub.publish(msg); flag = 0; } ros::spinOnce(); loop_rate.sleep(); } }- 在CMakeList文件中加入
add_executable(tuling_nlu_node src/tuling_nlu.cpp) target_link_libraries(tuling_nlu_node ${catkin_LIBRARIES} -lcurl -ljsoncpp)- 修改好的CMakeList如下
cmake_minimum_required(VERSION 2.8.3) project(voice_system) find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs ) include_directories( include ${catkin_INCLUDE_DIRS} ) add_executable(xf_tts_node src/xf_tts.cpp) target_link_libraries(xf_tts_node ${catkin_LIBRARIES} -lmsc -lrt -ldl -lpthread) add_executable(tuling_nlu_node src/tuling_nlu.cpp) target_link_libraries(tuling_nlu_node ${catkin_LIBRARIES} -lcurl -ljsoncpp)- 在catkin_ws编译一下
- $ cd catkin_ws
- $ catkin_make
- 现在就可以和机器人对话了
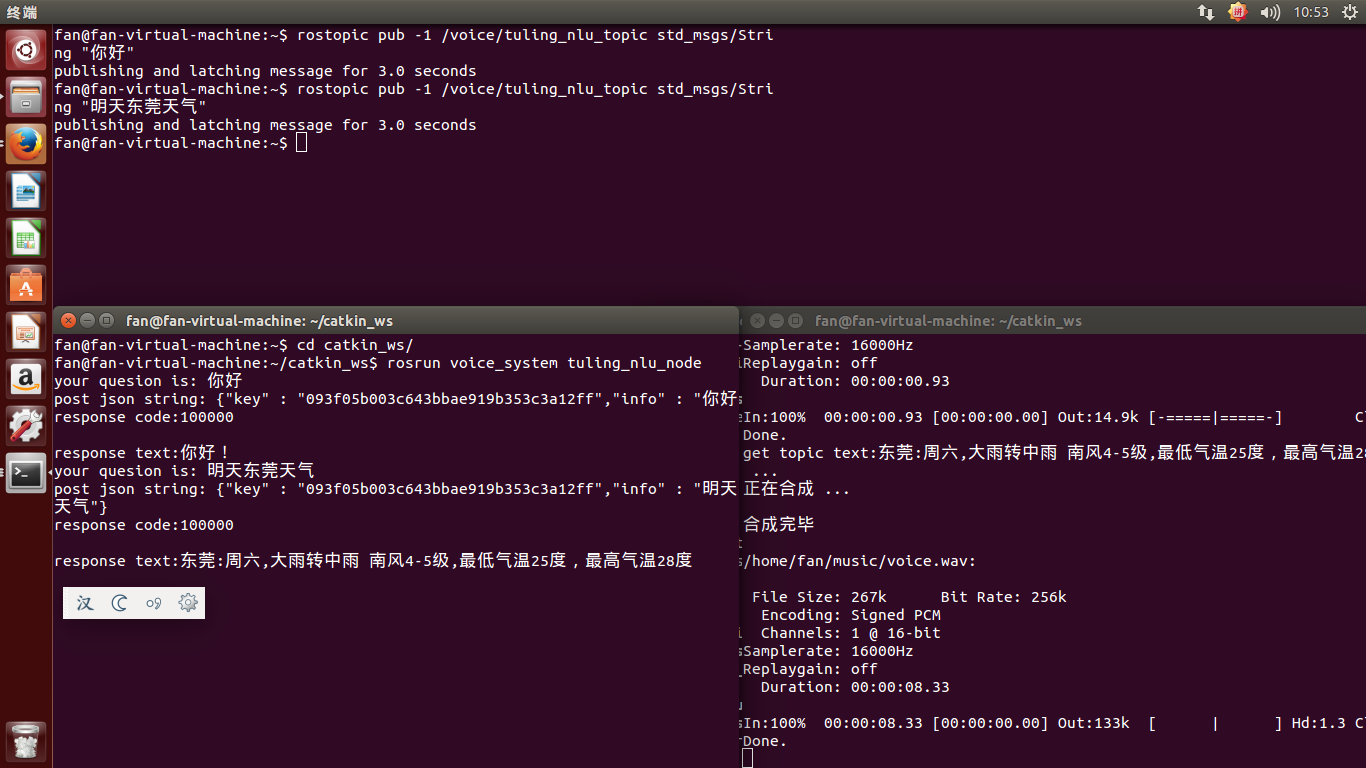
- 首先roscore一下,在catkin_ws下运行xf_tts_node节点和tuling_nlu_node节点
- $ rosrun voice_system xf_tts_node
- $ rosrun voice_system tuling_nlu_node
- $ rostopic pub -1 /voice/tuling_nlu_topic std_msgs/String "明天东莞天气"
- 在此,你便能听到图灵机器人的回复了
该文章主要是对自己学习的一些总结,方便以后学习,也对学习该方面的人提供一些帮助,如有问题请指出。
同时该文章也借鉴了ros小课堂的一些内容。














 1607
1607











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









