






- 将以前下载的的语音包的 samples/iat_record/的iat_record.c speech_recognizer.c speech_recognizer.c 拷贝到工程src中,
linuxrec.h speech_recognizer.h formats.h文件拷贝到 工程的include中
- 下面修改iat_record.c文件为xf_asr.cpp
/* * xf_asr_node * xf_asr.cpp * 语音听写(iFly Auto Transform)技术能够实时地将语音转换成对应的文字。 */ #include<ros/ros.h> #include<std_msgs/String.h> #include<std_msgs/Int32.h> #include <stdlib.h> #include <stdio.h> #include <string.h> #include <unistd.h> #include "/home/fan/SoftWare/include/qisr.h" #include "/home/fan/SoftWare/include/msp_cmn.h" #include "/home/fan/SoftWare/include/msp_errors.h" #include "/home/fan/catkin_ws/src/voice_system/include/speech_recognizer.h" using namespace std; #define FRAME_LEN 640 #define BUFFER_SIZE 4096 #define ASRFLAG 1 using namespace std; bool flag = false; bool recorder_Flag = true; string result = ""; /* Upload User words */ static int upload_userwords() { char* userwords = NULL; size_t len = 0; size_t read_len = 0; FILE* fp = NULL; int ret = -1; fp = fopen("userwords.txt", "rb"); if (NULL == fp) { printf("\nopen [userwords.txt] failed! \n"); goto upload_exit; } fseek(fp, 0, SEEK_END); len = ftell(fp); fseek(fp, 0, SEEK_SET); userwords = (char*)malloc(len + 1); if (NULL == userwords) { printf("\nout of memory! \n"); goto upload_exit; } read_len = fread((void*)userwords, 1, len, fp); if (read_len != len) { printf("\nread [userwords.txt] failed!\n"); goto upload_exit; } userwords[len] = '\0'; MSPUploadData("userwords", userwords, len, "sub = uup, dtt = userword", &ret); //ÉÏ´«Óû§´Ê±í if (MSP_SUCCESS != ret) { printf("\nMSPUploadData failed ! errorCode: %d \n", ret); goto upload_exit; } upload_exit: if (NULL != fp) { fclose(fp); fp = NULL; } if (NULL != userwords) { free(userwords); userwords = NULL; } return ret; } static void show_result(char *str, char is_over) { printf("\rResult: [ %s ]", str); if(is_over) putchar('\n'); string s(str); result = s; flag = true; //设置发布话题为真 } static char *g_result = NULL; static unsigned int g_buffersize = BUFFER_SIZE; void on_result(const char *result, char is_last) { if (result) { size_t left = g_buffersize - 1 - strlen(g_result); size_t size = strlen(result); if (left < size) { g_result = (char*)realloc(g_result, g_buffersize + BUFFER_SIZE); if (g_result) g_buffersize += BUFFER_SIZE; else { printf("mem alloc failed\n"); return; } } strncat(g_result, result, size); show_result(g_result, is_last); } } void on_speech_begin() { if (g_result) { free(g_result); } g_result = (char*)malloc(BUFFER_SIZE); g_buffersize = BUFFER_SIZE; memset(g_result, 0, g_buffersize); printf("Start Listening...\n"); } void on_speech_end(int reason) { if (reason == END_REASON_VAD_DETECT) { printf("\nSpeaking done \n"); recorder_Flag = false; } else printf("\nRecognizer error %d\n", reason); } /* demo recognize the audio from microphone */ static void demo_mic(const char* session_begin_params) { int errcode; int i = 0; struct speech_rec iat; struct speech_rec_notifier recnotifier = { on_result, on_speech_begin, on_speech_end }; errcode = sr_init(&iat, session_begin_params, SR_MIC, &recnotifier); if (errcode) { printf("speech recognizer init failed\n"); return; } errcode = sr_start_listening(&iat); if (errcode) { printf("start listen failed %d\n", errcode); } /* demo 15 seconds recording */ while(recorder_Flag) { sleep(1); } errcode = sr_stop_listening(&iat); if (errcode) { printf("stop listening failed %d\n", errcode); } sr_uninit(&iat); } /* * 打开麦克风 录音 发送到服务器 */ void asrProcess() { int ret = MSP_SUCCESS; int upload_on = 1; /* whether upload the user word */ /* login params, please do keep the appid correct */ const char* login_params = "appid = 5b090780, work_dir = ."; /* * See "iFlytek MSC Reference Manual" */ const char* session_begin_params = "sub = iat, domain = iat, language = zh_cn, " "accent = mandarin, sample_rate = 16000, " "result_type = plain, result_encoding = utf8"; /* Login first. the 1st arg is username, the 2nd arg is password * just set them as NULL. the 3rd arg is login paramertes * */ ret = MSPLogin(NULL, NULL, login_params); if (MSP_SUCCESS != ret) { printf("MSPLogin failed , Error code %d.\n",ret); goto exit; // login fail, exit the program } /* if (upload_on) { printf("Uploading the user words ...\n"); ret = upload_userwords(); if (MSP_SUCCESS != ret) goto exit; printf("Uploaded successfully\n"); } */ demo_mic(session_begin_params); exit: MSPLogout(); // Logout... } /* * 根据发布的话题来修改录音标志 */ void asrCallBack(const std_msgs::Int32::ConstPtr &msg) { ROS_INFO_STREAM("Topic is Subscriber"); if(msg->data == ASRFLAG) { asrProcess(); } } /* main thread: start/stop record ; query the result of recgonization. * record thread: record callback(data write) * helper thread: ui(keystroke detection) */ int main(int argc, char* argv[]) { ros::init(argc, argv, "xf_asr_node"); ros::NodeHandle nd; ros::Subscriber sub = nd.subscribe("/voice/xf_asr_topic", 1, asrCallBack); ros::Publisher pub = nd.advertise<std_msgs::String>("/voice/tuling_nlu_topic", 3); ros::Rate loop_rate(10); while(ros::ok()) { if(flag) { std_msgs::String msg; msg.data = result; pub.publish(msg); flag = false; recorder_Flag = true; } ros::spinOnce(); loop_rate.sleep(); } return 0; }- 在CMakeLists中加入
add_executable(xf_asr_node src/xf_asr.cpp src/speech_recognizer.cpp src/linuxrec.cpp) target_link_libraries(xf_asr_node ${catkin_LIBRARIES} -lmsc -lrt -ldl -lpthread -lasound)- 修改完了的CMakeLists文件如下
cmake_minimum_required(VERSION 2.8.3) project(voice_system) find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs ) include_directories( include ${catkin_INCLUDE_DIRS} ) add_executable(xf_tts_node src/xf_tts.cpp) target_link_libraries(xf_tts_node ${catkin_LIBRARIES} -lmsc -lrt -ldl -lpthread) add_executable(tuling_nlu_node src/tuling_nlu.cpp) target_link_libraries(tuling_nlu_node ${catkin_LIBRARIES} -lcurl -ljsoncpp) add_executable(xf_asr_node src/xf_asr.cpp src/speech_recognizer.cpp src/linuxrec.cpp) target_link_libraries(xf_asr_node ${catkin_LIBRARIES} -lmsc -lrt -ldl -lpthread -lasound)修改linuxrec.cpp,修改完如下所示
/* @file @brief record demo for linux @author taozhang9 @date 2016/05/27 */ #include <stdio.h> #include <stdlib.h> #include <fcntl.h> #include <alsa/asoundlib.h> #include <signal.h> #include <sys/stat.h> #include <pthread.h> #include "/home/fan/catkin_ws/src/voice_system/include/formats.h" #include "/home/fan/catkin_ws/src/voice_system/include/linuxrec.h" #define DBG_ON 1 #if DBG_ON #define dbg printf #else #define dbg #endif /* Do not change the sequence */ enum { RECORD_STATE_CREATED, /* Init */ RECORD_STATE_CLOSING, RECORD_STATE_READY, /* Opened */ RECORD_STATE_STOPPING, /* During Stop */ RECORD_STATE_RECORDING, /* Started */ }; #define SAMPLE_RATE 16000 #define SAMPLE_BIT_SIZE 16 #define FRAME_CNT 10 //#define BUF_COUNT 1 #define DEF_BUFF_TIME 500000 #define DEF_PERIOD_TIME 100000 #define DEFAULT_FORMAT \ {\ WAVE_FORMAT_PCM, \ 1, \ 16000, \ 32000, \ 2, \ 16, \ sizeof(WAVEFORMATEX) \ } #if 0 struct bufinfo { char *data; unsigned int bufsize; }; #endif static int show_xrun = 1; static int start_record_internal(snd_pcm_t *pcm) { return snd_pcm_start(pcm); } static int stop_record_internal(snd_pcm_t *pcm) { return snd_pcm_drop(pcm); } static int is_stopped_internal(struct recorder *rec) { snd_pcm_state_t state; state = snd_pcm_state((snd_pcm_t *)rec->wavein_hdl); switch (state) { case SND_PCM_STATE_RUNNING: case SND_PCM_STATE_DRAINING: return 0; default: break; } return 1; } static int format_ms_to_alsa(const WAVEFORMATEX * wavfmt, snd_pcm_format_t * format) { snd_pcm_format_t tmp; tmp = snd_pcm_build_linear_format(wavfmt->wBitsPerSample, wavfmt->wBitsPerSample, wavfmt->wBitsPerSample == 8 ? 1 : 0, 0); if ( tmp == SND_PCM_FORMAT_UNKNOWN ) return -EINVAL; *format = tmp; return 0; } /* set hardware and software params */ static int set_hwparams(struct recorder * rec, const WAVEFORMATEX *wavfmt, unsigned int buffertime, unsigned int periodtime) { snd_pcm_hw_params_t *params; int err; unsigned int rate; snd_pcm_format_t format; snd_pcm_uframes_t size; snd_pcm_t *handle = (snd_pcm_t *)rec->wavein_hdl; rec->buffer_time = buffertime; rec->period_time = periodtime; snd_pcm_hw_params_alloca(¶ms); err = snd_pcm_hw_params_any(handle, params); if (err < 0) { dbg("Broken configuration for this PCM"); return err; } err = snd_pcm_hw_params_set_access(handle, params, SND_PCM_ACCESS_RW_INTERLEAVED); if (err < 0) { dbg("Access type not available"); return err; } err = format_ms_to_alsa(wavfmt, &format); if (err) { dbg("Invalid format"); return - EINVAL; } err = snd_pcm_hw_params_set_format(handle, params, format); if (err < 0) { dbg("Sample format non available"); return err; } err = snd_pcm_hw_params_set_channels(handle, params, wavfmt->nChannels); if (err < 0) { dbg("Channels count non available"); return err; } rate = wavfmt->nSamplesPerSec; err = snd_pcm_hw_params_set_rate_near(handle, params, &rate, 0); if (err < 0) { dbg("Set rate failed"); return err; } if(rate != wavfmt->nSamplesPerSec) { dbg("Rate mismatch"); return -EINVAL; } if (rec->buffer_time == 0 || rec->period_time == 0) { err = snd_pcm_hw_params_get_buffer_time_max(params, &rec->buffer_time, 0); assert(err >= 0); if (rec->buffer_time > 500000) rec->buffer_time = 500000; rec->period_time = rec->buffer_time / 4; } err = snd_pcm_hw_params_set_period_time_near(handle, params, &rec->period_time, 0); if (err < 0) { dbg("set period time fail"); return err; } err = snd_pcm_hw_params_set_buffer_time_near(handle, params, &rec->buffer_time, 0); if (err < 0) { dbg("set buffer time failed"); return err; } err = snd_pcm_hw_params_get_period_size(params, &size, 0); if (err < 0) { dbg("get period size fail"); return err; } rec->period_frames = size; err = snd_pcm_hw_params_get_buffer_size(params, &size); if (size == rec->period_frames) { dbg("Can't use period equal to buffer size (%lu == %lu)", size, rec->period_frames); return -EINVAL; } rec->buffer_frames = size; rec->bits_per_frame = wavfmt->wBitsPerSample; /* set to driver */ err = snd_pcm_hw_params(handle, params); if (err < 0) { dbg("Unable to install hw params:"); return err; } return 0; } static int set_swparams(struct recorder * rec) { int err; snd_pcm_sw_params_t *swparams; snd_pcm_t * handle = (snd_pcm_t*)(rec->wavein_hdl); /* sw para */ snd_pcm_sw_params_alloca(&swparams); err = snd_pcm_sw_params_current(handle, swparams); if (err < 0) { dbg("get current sw para fail"); return err; } err = snd_pcm_sw_params_set_avail_min(handle, swparams, rec->period_frames); if (err < 0) { dbg("set avail min failed"); return err; } /* set a value bigger than the buffer frames to prevent the auto start. * we use the snd_pcm_start to explicit start the pcm */ err = snd_pcm_sw_params_set_start_threshold(handle, swparams, rec->buffer_frames * 2); if (err < 0) { dbg("set start threshold fail"); return err; } if ( (err = snd_pcm_sw_params(handle, swparams)) < 0) { dbg("unable to install sw params:"); return err; } return 0; } static int set_params(struct recorder *rec, WAVEFORMATEX *fmt, unsigned int buffertime, unsigned int periodtime) { int err; WAVEFORMATEX defmt = DEFAULT_FORMAT; if (fmt == NULL) { fmt = &defmt; } err = set_hwparams(rec, fmt, buffertime, periodtime); if (err) return err; err = set_swparams(rec); if (err) return err; return 0; } /* * Underrun and suspend recovery */ static int xrun_recovery(snd_pcm_t *handle, int err) { if (err == -EPIPE) { /* over-run */ if (show_xrun) printf("!!!!!!overrun happend!!!!!!"); err = snd_pcm_prepare(handle); if (err < 0) { if (show_xrun) printf("Can't recovery from overrun," "prepare failed: %s\n", snd_strerror(err)); return err; } return 0; } else if (err == -ESTRPIPE) { while ((err = snd_pcm_resume(handle)) == -EAGAIN) usleep(200000); /* wait until the suspend flag is released */ if (err < 0) { err = snd_pcm_prepare(handle); if (err < 0) { if (show_xrun) printf("Can't recovery from suspend," "prepare failed: %s\n", snd_strerror(err)); return err; } } return 0; } return err; } static ssize_t pcm_read(struct recorder *rec, size_t rcount) { ssize_t r; size_t count = rcount; char *data; snd_pcm_t *handle = (snd_pcm_t *)rec->wavein_hdl; if(!handle) return -EINVAL; data = rec->audiobuf; while (count > 0) { r = snd_pcm_readi(handle, data, count); if (r == -EAGAIN || (r >= 0 && (size_t)r < count)) { snd_pcm_wait(handle, 100); } else if (r < 0) { if(xrun_recovery(handle, r) < 0) { return -1; } } if (r > 0) { count -= r; data += r * rec->bits_per_frame / 8; } } return rcount; } static void * record_thread_proc(void * para) { struct recorder * rec = (struct recorder *) para; size_t frames, bytes; sigset_t mask, oldmask; sigemptyset(&mask); sigaddset(&mask, SIGINT); sigaddset(&mask, SIGTERM); pthread_sigmask(SIG_BLOCK, &mask, &oldmask); while(1) { frames = rec->period_frames; bytes = frames * rec->bits_per_frame / 8; /* closing, exit the thread */ if (rec->state == RECORD_STATE_CLOSING) break; if(rec->state < RECORD_STATE_RECORDING) usleep(100000); if (pcm_read(rec, frames) != frames) { return NULL; } if (rec->on_data_ind) rec->on_data_ind(rec->audiobuf, bytes, rec->user_cb_para); } return rec; } static int create_record_thread(void * para, pthread_t * tidp) { int err; err = pthread_create(tidp, NULL, record_thread_proc, (void *)para); if (err != 0) return err; return 0; } #if 0 /* don't use it now... cuz only one buffer supported */ static void free_rec_buffer(struct recorder * rec) { if (rec->bufheader) { unsigned int i; struct bufinfo *info = (struct bufinfo *) rec->bufheader; assert(rec->bufcount > 0); for (i = 0; i < rec->bufcount; ++i) { if (info->data) { free(info->data); info->data = NULL; info->bufsize = 0; info->audio_bytes = 0; } info++; } free(rec->bufheader); rec->bufheader = NULL; } rec->bufcount = 0; } static int prepare_rec_buffer(struct recorder * rec ) { struct bufinfo *buffers; unsigned int i; int err; size_t sz; /* the read and QISRWrite is blocked, currently only support one buffer, * if overrun too much, need more buffer and another new thread * to write the audio to network */ rec->bufcount = 1; sz = sizeof(struct bufinfo)*rec->bufcount; buffers=(struct bufinfo*)malloc(sz); if (!buffers) { rec->bufcount = 0; goto fail; } memset(buffers, 0, sz); rec->bufheader = buffers; for (i = 0; i < rec->bufcount; ++i) { buffers[i].bufsize = (rec->period_frames * rec->bits_per_frame / 8); buffers[i].data = (char *)malloc(buffers[i].bufsize); if (!buffers[i].data) { buffers[i].bufsize = 0; goto fail; } buffers[i].audio_bytes = 0; } return 0; fail: free_rec_buffer(rec); return -ENOMEM; } #else static void free_rec_buffer(struct recorder * rec) { if (rec->audiobuf) { free(rec->audiobuf); rec->audiobuf = NULL; } } static int prepare_rec_buffer(struct recorder * rec ) { /* the read and QISRWrite is blocked, currently only support one buffer, * if overrun too much, need more buffer and another new thread * to write the audio to network */ size_t sz = (rec->period_frames * rec->bits_per_frame / 8); rec->audiobuf = (char *)malloc(sz); if(!rec->audiobuf) return -ENOMEM; return 0; } #endif static int open_recorder_internal(struct recorder * rec, record_dev_id dev, WAVEFORMATEX * fmt) { int err = 0; err = snd_pcm_open((snd_pcm_t **)&rec->wavein_hdl, dev.u.name, SND_PCM_STREAM_CAPTURE, 0); if(err < 0) goto fail; err = set_params(rec, fmt, DEF_BUFF_TIME, DEF_PERIOD_TIME); if(err) goto fail; assert(rec->bufheader == NULL); err = prepare_rec_buffer(rec); if(err) goto fail; err = create_record_thread((void*)rec, &rec->rec_thread); if(err) goto fail; return 0; fail: if(rec->wavein_hdl) snd_pcm_close((snd_pcm_t *) rec->wavein_hdl); rec->wavein_hdl = NULL; free_rec_buffer(rec); return err; } static void close_recorder_internal(struct recorder *rec) { snd_pcm_t * handle; handle = (snd_pcm_t *) rec->wavein_hdl; /* may be the thread is blocked at read, cancel it */ pthread_cancel(rec->rec_thread); /* wait for the pcm thread quit first */ pthread_join(rec->rec_thread, NULL); if(handle) { snd_pcm_close(handle); rec->wavein_hdl = NULL; } free_rec_buffer(rec); } /* return the count of pcm device */ /* list all cards */ static int get_pcm_device_cnt(snd_pcm_stream_t stream) { void **hints, **n; char *io, *filter, *name; int cnt = 0; if (snd_device_name_hint(-1, "pcm", &hints) < 0) return 0; n = hints; filter =(char*)(stream == SND_PCM_STREAM_CAPTURE ? "Input" : "Output"); while (*n != NULL) { io = snd_device_name_get_hint(*n, "IOID"); name = snd_device_name_get_hint(*n, "NAME"); if (name && (io == NULL || strcmp(io, filter) == 0)) cnt ++; if (io != NULL) free(io); if (name != NULL) free(name); n++; } snd_device_name_free_hint(hints); return cnt; } static void free_name_desc(char **name_or_desc) { char **ss; ss = name_or_desc; if(NULL == name_or_desc) return; while(*name_or_desc) { free(*name_or_desc); *name_or_desc = NULL; name_or_desc++; } free(ss); } /* return success: total count, need free the name and desc buffer * fail: -1 , *name_out and *desc_out will be NULL */ static int list_pcm(snd_pcm_stream_t stream, char**name_out, char ** desc_out) { void **hints, **n; char **name, **descr; char *io; const char *filter; int cnt = 0; int i = 0; if (snd_device_name_hint(-1, "pcm", &hints) < 0) return 0; n = hints; cnt = get_pcm_device_cnt(stream); if(!cnt) { goto fail; } *name_out = (char*)(calloc(sizeof(char *) , (1+cnt))); if (*name_out == NULL) goto fail; *desc_out = (char*)(calloc(sizeof(char *) , (1 + cnt))); if (*desc_out == NULL) goto fail; /* the last one is a flag, NULL */ name_out[cnt] = NULL; desc_out[cnt] = NULL; name = name_out; descr = desc_out; filter = (char*)(stream == SND_PCM_STREAM_CAPTURE ? "Input" : "Output"); while (*n != NULL && i < cnt) { *name = snd_device_name_get_hint(*n, "NAME"); *descr = snd_device_name_get_hint(*n, "DESC"); io = snd_device_name_get_hint(*n, "IOID"); if (name == NULL || (io != NULL && strcmp(io, filter) != 0) ){ if (*name) free(*name); if (*descr) free(*descr); } else { if (*descr == NULL) { *descr = (char*)malloc(4); memset(*descr, 0, 4); } name++; descr++; i++; } if (io != NULL) free(io); n++; } snd_device_name_free_hint(hints); return cnt; fail: free_name_desc(name_out); free_name_desc(desc_out); snd_device_name_free_hint(hints); return -1; } /* ------------------------------------- * Interfaces --------------------------------------*/ /* the device id is a pcm string name in linux */ record_dev_id get_default_input_dev() { record_dev_id id; id.u.name = (char*)"default"; return id; } record_dev_id * list_input_device() { // TODO: unimplemented return NULL; } int get_input_dev_num() { return get_pcm_device_cnt(SND_PCM_STREAM_CAPTURE); } /* callback will be run on a new thread */ int create_recorder(struct recorder ** out_rec, void (*on_data_ind)(char *data, unsigned long len, void *user_cb_para), void* user_cb_para) { struct recorder * myrec; myrec = (struct recorder *)malloc(sizeof(struct recorder)); if(!myrec) return -RECORD_ERR_MEMFAIL; memset(myrec, 0, sizeof(struct recorder)); myrec->on_data_ind = on_data_ind; myrec->user_cb_para = user_cb_para; myrec->state = RECORD_STATE_CREATED; *out_rec = myrec; return 0; } void destroy_recorder(struct recorder *rec) { if(!rec) return; free(rec); } int open_recorder(struct recorder * rec, record_dev_id dev, WAVEFORMATEX * fmt) { int ret = 0; if(!rec ) return -RECORD_ERR_INVAL; if(rec->state >= RECORD_STATE_READY) return 0; ret = open_recorder_internal(rec, dev, fmt); if(ret == 0) rec->state = RECORD_STATE_READY; return 0; } void close_recorder(struct recorder *rec) { if(rec == NULL || rec->state < RECORD_STATE_READY) return; if(rec->state == RECORD_STATE_RECORDING) stop_record(rec); rec->state = RECORD_STATE_CLOSING; close_recorder_internal(rec); rec->state = RECORD_STATE_CREATED; } int start_record(struct recorder * rec) { int ret; if(rec == NULL) return -RECORD_ERR_INVAL; if( rec->state < RECORD_STATE_READY) return -RECORD_ERR_NOT_READY; if( rec->state == RECORD_STATE_RECORDING) return 0; ret = start_record_internal((snd_pcm_t *)rec->wavein_hdl); if(ret == 0) rec->state = RECORD_STATE_RECORDING; return ret; } int stop_record(struct recorder * rec) { int ret; if(rec == NULL) return -RECORD_ERR_INVAL; if( rec->state < RECORD_STATE_RECORDING) return 0; rec->state = RECORD_STATE_STOPPING; ret = stop_record_internal((snd_pcm_t *)rec->wavein_hdl); if(ret == 0) { rec->state = RECORD_STATE_READY; } return ret; } int is_record_stopped(struct recorder *rec) { if(rec->state == RECORD_STATE_RECORDING) return 0; return is_stopped_internal(rec); }- 在catkin_ws编译一下
- $ cd catkin_ws
- $ catkin_make
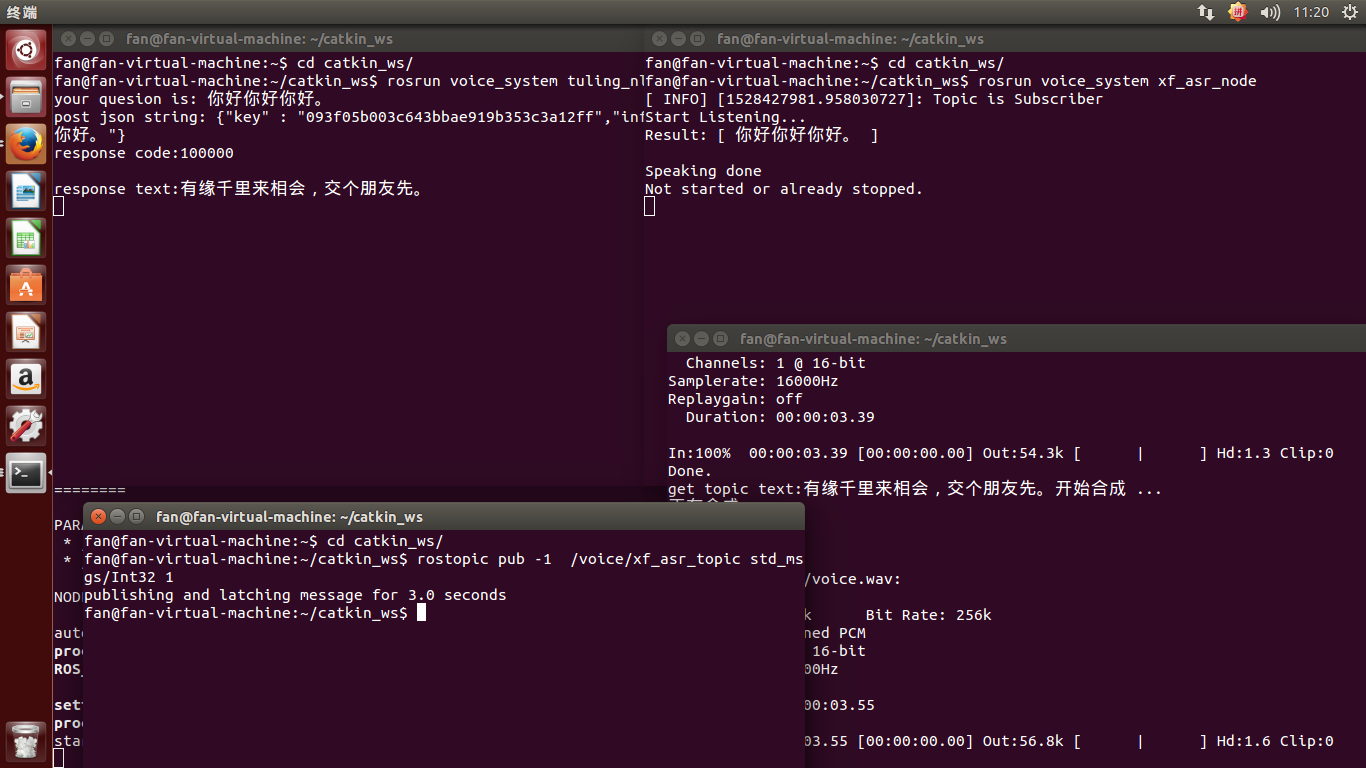
- 现在就可以和机器人对话了
- 首先roscore一下,在catkin_ws下运行xf_tts_node节点、tuling_nlu_node和xf_asr_node节点
- $ rosrun voice_system xf_tts_node
- $ rosrun voice_system tuling_nlu_node
- $ rosrun voice_system xf_asr_node
- $ rostopic pub -1 /voice/xf_asr_topic std_msgs/Int32 1
该文章主要是对自己学习的一些总结,方便以后学习,也对学习该方面的人提供一些帮助,如有问题请指出。
同时该文章也借鉴了ros小课堂的一些内容。














 6724
6724











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









