







 这是例程的结果: 1:例程多目标跟踪:一系列标识基于相对位置关系,当至少一个标识可见可以计算出其他标识在相机坐标系中的位置。 基于simple.c实现的程序: 1):在init函数中,导入多目标配置文件,这个标识文件包含一系列标识和他们在一个固定的坐标系统中确切的位置(包含标识的角点,一系列标识平面的中心,一个任意位置) 这个文件可以从一个全局位置计算出所有标识的转换矩阵。而arMult
这是例程的结果: 1:例程多目标跟踪:一系列标识基于相对位置关系,当至少一个标识可见可以计算出其他标识在相机坐标系中的位置。 基于simple.c实现的程序: 1):在init函数中,导入多目标配置文件,这个标识文件包含一系列标识和他们在一个固定的坐标系统中确切的位置(包含标识的角点,一系列标识平面的中心,一个任意位置) 这个文件可以从一个全局位置计算出所有标识的转换矩阵。而arMult
这是例程的结果:
1:例程多目标跟踪:一系列标识基于相对位置关系,当至少一个标识可见可以计算出其他标识在相机坐标系中的位置。
基于simple.c实现的程序:
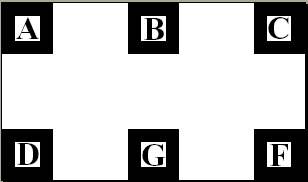
1):在init函数中,导入多目标配置文件,这个标识文件包含一系列标识和他们在一个固定的坐标系统中确切的位置(包含标识的角点,一系列标识平面的中心,一个任意位置)
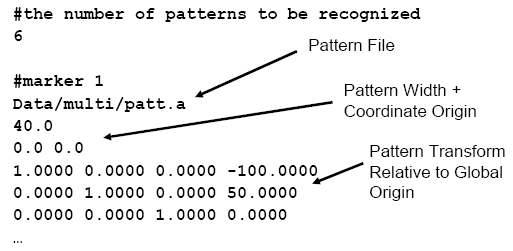
这个文件可以从一个全局位置计算出所有标识的转换矩阵。而arMultiGetTransMat(marker_info, marker_num, config)) 不给出每个标识在相机坐标系统中的位置,但是给出在相机坐标系统中一个固定坐标系统的位置,和每一个标识相对于这个固定坐标系统的位置。所以即时不检测到标识,也可以显示在那个标识上的三维目标。
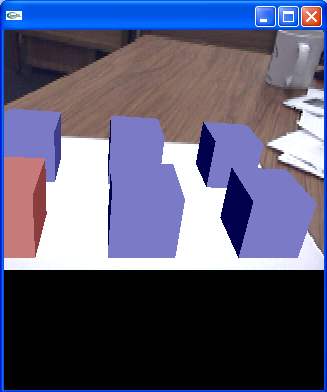
2:在绘制函数中,使用计算出的固定坐标系和标识的位置显示立方体。检测到标识是visible就显示为蓝色,否则,显示为红色。
3:在多标识中,一个重要的结构体:ARMultiM
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1341
1341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









