







 研究对比了基于势场的无人机群模型与非线性模型预测控制(NMPC)模型在复杂环境中的性能。NMPC模型在保持群体一致性、速度和安全性方面表现出优越性,尤其在处理障碍物和适应不同环境条件时。实验证明,NMPC模型能够实现更快的任务完成时间,更有序的飞行,并且对障碍物密度和速度变化具有更好的可扩展性。
研究对比了基于势场的无人机群模型与非线性模型预测控制(NMPC)模型在复杂环境中的性能。NMPC模型在保持群体一致性、速度和安全性方面表现出优越性,尤其在处理障碍物和适应不同环境条件时。实验证明,NMPC模型能够实现更快的任务完成时间,更有序的飞行,并且对障碍物密度和速度变化具有更好的可扩展性。
【刊物】 nature子刊:machine intelligence
【年份】2020
本文重点研究swarm,提出一种NMPC模型来描述集群,比PF模型具有更好的集群指标,类似于vicsek的那篇science robotics文章。
摘要:经典的空中蜂群模型通常将全球协同运动描述为发生在个体水平上的局部相互作用的组合。从数学上讲,这些相互作用用势场表示。尽管这些模型的解释很成功,但当空中机器人群应用于在现实世界的混乱环境中飞行的时,它们并不能保证快速和安全的集群运动。此外,这些模型需要与部署场景紧密耦合,以诱导一致的群体行为。在这里,我们提出了一个预测模型,该模型将势场模型的局部原则合并到一个目标函数中,并在agent的动力学和环境的知识下优化这些原则。结果表明,该方法提高了群的速度、order和安全性,与环境布局无关,在群速度和agent间距离上具有可扩展性。我们的模型由五个四旋翼验证,它们可以在充满障碍物的真实室内环境中成功导航。
1.引言和相关工作
从椋鸟群流畅的波浪状运动到蜂群快速的转弯动作,大自然展示了许多协调飞行的例子。空中机器人技术的最新进展导致了智能无人机以智能手机[8]的价格出现,但部署能够自动协调其本地轨迹的无人机群仍然是一个挑战。无人机群可以提供比单个无人机更大的区域覆盖范围,用于监测和探索任务[9、10],它们可以通过配置一系列不同的传感器[11]来收集多种传感器数据。自动空中蜂群还可以实现单无人机无法实现的功能,如大型物体的协同运输和空中施工[12,13]。Intel[14]、EHang[15]和Verity Studios[16]等公司已经在空中灯光秀中部署了数百架无人机,但在这种情况下,每架无人机都由中央计算机单独控制,以遵循预先计算的轨迹。相反,生物群的协调、同步运动是一种自组织行为,来自局部信息[4-6]、[17-19],因此可以应对不可预见的情况,如穿越森林或城市环境。
早期的工作表明,生物群的集体运动可以通过同步施加到所有agent上的三个行为规则的组合来描述[20]。这些规则包括: (1) 内聚力,使每个agent更接近其邻居; (2) 排斥,使每个agent远离其邻居以避免冲突; (3) 对齐,使每个agent朝向其邻居的平均航向。在有目标导向的飞行中,对齐规则被迁移规则替代,指引每个agent的方向[21、22]。为了在有障碍物的环境中导航,需要增加第四条规则,即碰撞避免,以引导agent绕开obstacles[20、23、24]。尽管这些规则是在本地定义的,也就是说,每一个agent都针对一组有限的邻居agent来调节其飞行,但事实证明它们产生了全局协同的运动。在数学上,这些规则可以由agent施加在它们的邻居上的虚拟力来建模,并且与势场 (PFs) 相关联,即描述力如何在空间中的不同位置处作用的向量场。
PFS编码群体的期望行为。它们以与弹簧-质量系统类似的方式调节邻居个体之间的机间距离,速度,使agent朝向共同方向并调节agent与obstacles的距离[23]。
PF swarm模型的优点是它们纯粹是被动的,这意味着它们的决策完全基于当前的感知信息,因此计算复杂度较低[20,23]。因此,PF模型便于在真实的机器人系统上实现,无论是在自由环境[21、25]具有凸障碍[24]的环境中。在后一种情况下,可以通过定义沿障碍物边界的虚拟排斥agent(称为shill-agent)来避免碰撞。然而,当蜂群接近障碍时,这些shill-agent带来了减慢蜂群速度的缺点[20,26]。这种效应在障碍物密度高的环境中变得显著,在这些环境中,PF蜂群会显著减速。这种减速可以通过削弱排斥力来减弱,尽管这是以牺牲群体安全为代价的,因为一些agent可能会发生碰撞。此外,考虑到现实世界的特殊性,这些模型通常包含大量具有复杂相互依赖关系的参数[2,24]。因此,它们通常需要采用优化技术,如进化算法,以确定参数的可行实例化,每个实例化都特定于集群的首选速度和agent间距离,以及环境布局[21、24、27]。
本文提出了一种基于预测控制的群集控制方法。具体地说,在保证在杂乱环境中安全导航的同时,预测控制的航群显示更快的飞行,能够适应不同的障碍物密度,并且可以扩展到智能体间距离和群速度的变化。最近,有人主张,某种形式的预测控制,以它们共同行为的内部模型的形式,也可以被生物群所利用,在生物群中,诸如一群八哥或一群鱼等协调动作的明显同步不能用纯生物反应系统来解释。在这一假设的启发下,本文提出了一种基于非线性模型预测控制(NMPC)的群体行为模型。
模型预测控制(MPC)是计算系统的控制动作作为约束优化问题[28,29]的解决方案。 MPC利用系统的数学表示来预测和优化其在迭代过程中的未来行为。与PF控制不同,MPC可以明确地处理诸如物理限制的约束(例如,无人机的飞行速度和加速度)[30-32]和环境限制(例如,无飞行区域)[32-34]。然而,受限优化问题的迭代在线解决方案与更高的计算成本相关,因此机器人中的预测控制器的仅采用了最近的[35]。
MPC在多机系统仿真中显示了良好的效果。实例包括在无障碍物环境[36-37]中、在存在obstacles[33]的情况下以及在已知目标位置[38–40]的为情况下多机系统生成无碰撞轨迹中。NMPC是MPC的一种变体,可以处理系统和其约束的非线性[29]。这种优势是以更高的计算要求为代价的。在仿真中,在无障碍情况下利用NMPC控制leader-follower编队,在凸障碍34的情况下控制二维四旋翼编队。
在使用多台真实无人机的MPC方面所做的工作较少,这主要是由于实时实验的困难。在leader-follower配置中,线性MPC能被用于在存在虚拟障碍物的情况下进行轨迹规划,其中无人机(follower者)必须与虚拟agent(leader)保持恒定的距离[42]。然而,在leader-follower方法中,领导者具有群体轨迹的额外知识,这是预先编程的或由外部来源提供的。此方面引入了agent角色的不平等性,并在swarm中添加了单点故障的可能性。MPC用于在具有障碍物的环境中在线生成一组无人机的无碰撞轨迹,其中每个无人机被单独分配初始位置和目标位置[32]。相反,本文提出的模型旨在将群体导航作为一个独特的实体进行协调,并保证内部秩序,而不是单独生成轨迹。同时,我们避免了对群体施加刚性的编队或固定的拓扑结构,这可能会影响个体运动的自由和流动性。最后,在实际的多无人机系统中, NMPC能够处理非凸避碰约束,当Agent被分配相交路径时,尽管它们在空环境中飞行[44]。
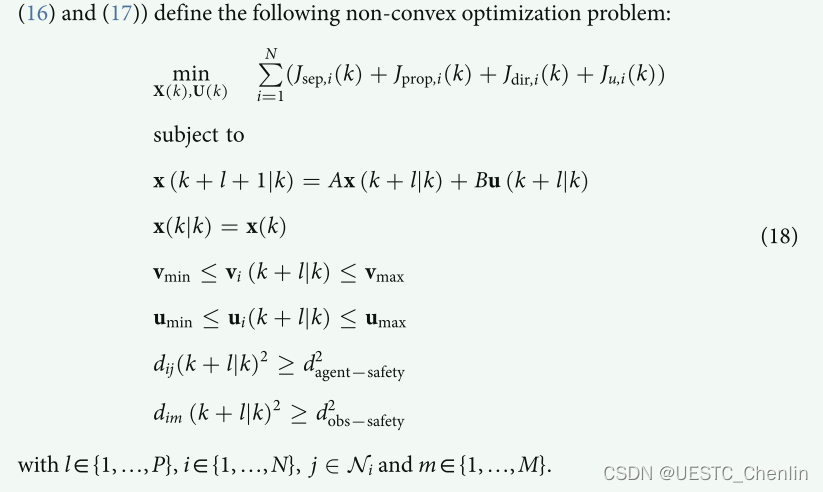
在所提出的NMPC模型中,待优化的目标函数由来自PF群模型的三个组件制成:(1)分离,其将agent间距离驱动到优选的值,(2)推进,其推动agent优选的速度值和(3)方向,其沿着优选方向操纵群。分离包含内聚力和排斥在单个规则中的影响,使得相邻agent之间的距离显示为显式参数。在NMPC群模型中一起组合在一起的推进和方向在PF群模型中复制了迁移项的效果。然而,用两个独立参数保持两个术语允许单独调整其相对强度。 (4)作为第四条规则,增加了control effort,以最大限度地减少agent的加速度,从而平滑飞行轨迹并提高能效。根据其邻居的知识及其自己的状态,每个无人机都调整了其飞行,并通过线性化动态模型预测其自己的轨迹和邻居的轨迹。无人机邻居在拓扑范围内被选中;也就是说,对于每个无人机,只有恒定数量的最近邻居被考虑[3,7]。
提出的 NMPC 模型集成了一组约束,以确保无人机之间和障碍物之间的安全距离。 我们实现了 NMPC 模型的集中式版本,并将仿真结果与 PF 模型进行了比较。 我们表明,预测控制器可以在杂乱的环境中安全地飞行蜂群,同时显着提高蜂群的飞行速度和同步性。 此外,我们表明,与 PF 模型不同,所提出的 NMPC 模型的性能与障碍物密度和环境布局无关。 此外,我们测试了所提出模型的可扩展性,以适应所需的机间距离和群体速度的变化。 我们在模拟中进行了系统的实验,并用一组五个手掌大小的四旋翼飞行器验证了结果。
2.结果
为了评估群体模型的性能,我们建立了一个林状环境,该环境由一个填充有圆柱形障碍物的矩形飞行区域组成。(图1a) 。在实验开始时,我们在区域一侧的预定起始区域内随机放置五架无人机(图1 a,红色区域)并让蜂群沿着迁移方向飞过该区域(图1 a,橙色箭头)。当所有无人机通过到达的飞机时,任务就完成了。(图1 a,橙色平面)。
我们考虑了八种不同的指标来评估空中蜂群的飞行质量。任务完成时间T测量蜂群穿越该区域所需的时间。agent间距离误差测量agent与首选距离
的偏差,agent间距离范围
,测量agent间距离变化的范围(由随时间变化的最小和最大agent间距离定义)。速度误差
测量agent速度与首选迁移速度
的偏差,以及agent速度变化的速度范围
。
测量
、
和
的值大于或等于0(理想情况)。我们通过计算智能体运动的方向相关性来确定群的同步水平,用所谓的顺序
表示。
的值介于−1(完全紊乱)和1(完美秩序)之间。最后,机间安全
评估swarm的agent避免相互碰撞的能力,agent–障碍物安全
评估agent避免与障碍物碰撞的能力。
和
取0(完全不安全)和1(完全安全,即零碰撞)之间的值(补充表1提供了数学公式)。为了评估任务期间swarm的整体性能,我们计算了这些指标的平均值和标准差。对于随时间变化的群的瞬时评估,我们还绘制了agent间的距离和速度,以及到障碍物的距离,从中我们可以了解它们各自的误差和范围,以及碰撞的发生情况。
我们在仿真中对提出的NMPC swarm模型进行了广泛测试,并将其与最近在30架真实无人机[24]上描述和验证的反应性PF模型进行了比较。除了排斥和避障规则外,PF模型还包括一个摩擦规则,以减少速度振荡。为了确保在开放环境中有连贯性的目标导向飞行,我们在PF模型中添加了连贯性和迁移规则。与之前的工作[21、24、27]一样,我们使用进化优化来搜索PF swarm模型的大参数空间,并偏好具有高度有序飞行 以及少量的agent-agent和agent-obstacle
(补充表3)。NMPC群集和PF群集的实验比较旨在强调所提出的NMPC群集模型的行为差异和性能优势。然而,对于物理无人机部署的群模型的选择也应该考虑计算资源,这对于NMPC蜂群来说是相当大的。
本文提出了三组仿真实验: (1) 比较了两种模型在相同环境条件下的性能指标, (2) 研究了PF群模型和NMPC群模型对不同障碍物密度环境的适应性, (3) 研究了NMPC群模型在不同优选速度和无人机间距下的可扩展性。最后,我们用五架手掌大小的无人机对NMPC群模型进行了实验验证(图1 c) 穿过一个带有圆柱形障碍物的房间(图1b) 。

图1: 无人机群飞行在杂乱环境中的实验设置。a,实验设置和环境配置的说明。配备无线电发射机的地面控制站,计算并向无人机发送运行时控制命令。蜂群飞在室内飞行竞技场的三维空间。无人机从预定起始区域(红色区域)内的初始随机位置起飞。无人机沿着优选的迁移方向(橙色箭头)聚集。当所有无人机通过到达的飞机时,任务就完成了。图1 a) 在区域的另一侧。b,室内测试环境填充有圆柱形障碍物。c,用于硬件实验的无人机的组件。
PF和NMPC空中蜂群的比较。PF和NMPC群在没有碰撞的情况下绕过障碍物(图2e),但NMPC群完成任务的速度比PF群快57%。任务时间缩短是由于NMPC群能够更一致地跟踪首选速度Vref(Ev = 0.02 ± 0.02,Rv = 0.08 ± 0.07)比PF swarm(Ev = 0.39 ± 0.15,Rv = 0.47 ± 0.15; 图2c)。NMPC群还产生了较小的agent间距离误差(Ed) = 0.11 ± 0.02)和范围(Rd = 0.55 ± 0.18)比PF swarm(Ed = 0.26 ± 路0.15号 = 0.90 ± 0.26)(图2b)。NMPC模型在整个飞行过程中生成了几乎完美有序的飞行操纵(Φ顺序) = 0.98 ± 0.02),而PF模型显示了更低和更多的变量顺序(Φ顺序) = 0.78 ± 0.17; 图2d)。NMPC 和 PF 群两者都不是呈现agent-agent或agent-障碍物碰撞(Φagent-safety = 1 ± 0,Φobs-safety = 1 ± 0;图 2e)。 尽管优化了群体的目标,但 NMPC 模型将与障碍物的最小距离降低到 0.03 m。 相比之下,PF swarm 与障碍物的最小距离为 0.14 m。 这种差异是由于在 PF 模型中,障碍物对靠近的主体施加排斥力,而在 NMPC 模型中,接近障碍物没有惩罚。 因此,在现实世界的群体中实施 NMPC 模型时,用户应谨慎选择安全裕度。
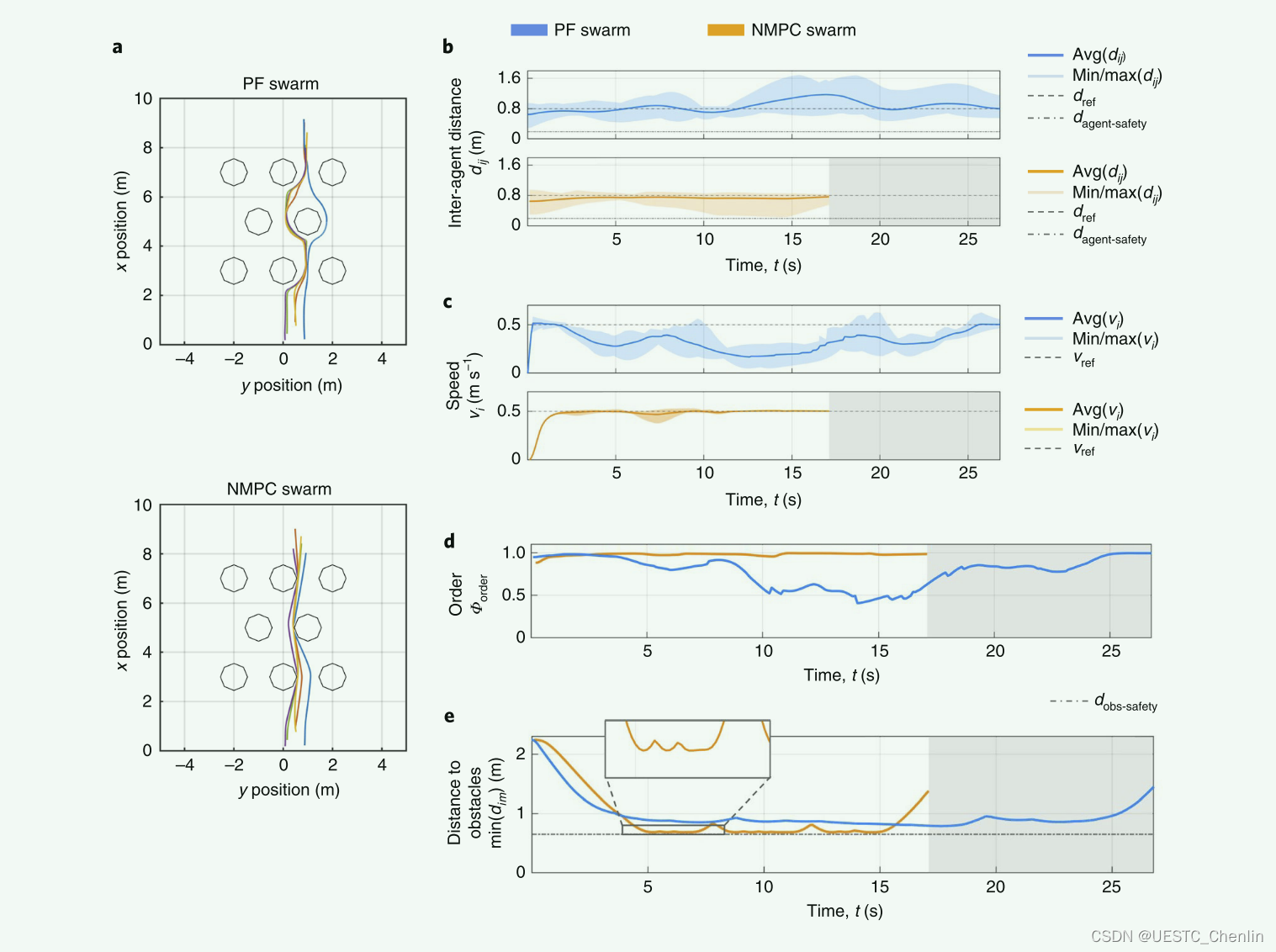
图2:仿真实验中PF和NMPC空中蜂群的比较。a、 五架无人机在杂乱环境中飞行的3D轨迹俯视图,带有PF(上图)和NMPC(下图)模型(补充视频1)。地图上的圆形物体对应于圆柱形障碍物。b、 agent间距离平均值(实线)和范围(阴影区域)。顶部的曲线(蓝色)表示PF群,底部的曲线(橙色)表示NMPC群。从NMPC swarm完成飞行任务的那一刻起,这些图以灰色阴影显示。c、 群速度平均值(实线)和范围(阴影区域)。d、 顺序指标。e、 到障碍物的距离,min(dim),表示为群agent和障碍物集之间的最小距离。
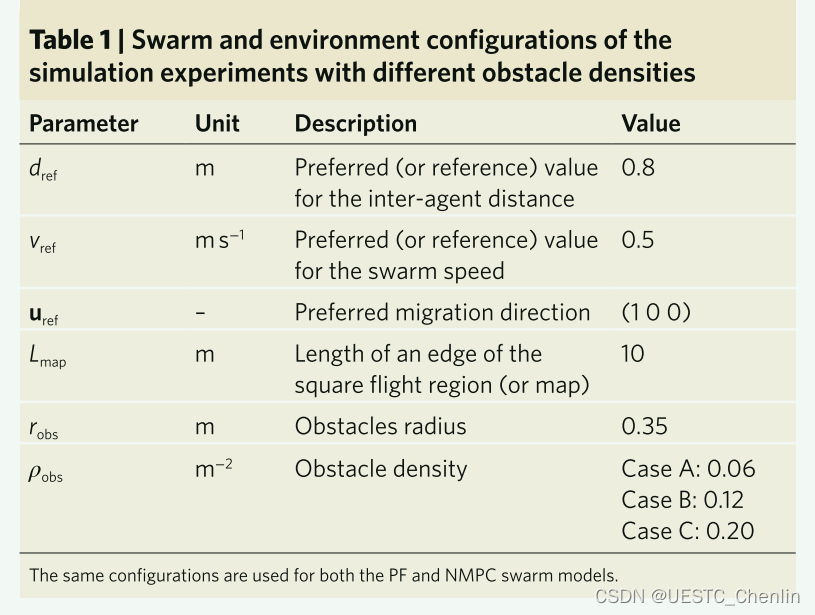
不同障碍物密度的环境。我们测试了三种不同障碍物密度(案例A,0.06;案例B,0.12;案例C,0.20)下的PF和NMPC群模型,以量化对群性能的影响(表1)。障碍物在地图上占据随机位置,但分布均匀(图3a,d)。无人机的初始位置是随机的。在图3中,我们展示了具有最高障碍物密度的场景(案例C)和两种模型的agent间距离和速度的演变。结果表明,使用NMPC群集(Ed)时,agent间距离误差较小 = 0.11 ± 0.02)比PF蜂群(Ed = 0.27 ± 0.12),并且NMPC群(Rd)的agent间距离范围较短 = 0.56 ±0.18 比PF蜂群短(Rd = 0.90 ± 0.26)(图3b,e)。NMPC蜂群比 PF蜂群更精确地追踪优先速度 Vref (Ev = 0.03 ± 0.02) ,速度范围较短(Rv = 0.08 ± 0.07)和0.47 ± 0.15,分别)(图3c,f)。 NMPC 集群的更快速度导致任务完成时间比 PF 集群更快(T = 21.5 s 和 34.1 s,分别)。
为了评估结果的可重复性,我们对三个障碍密度和两个群模型分别进行了10次随机仿真,并在此报告了聚合性能结果(图3g)。虽然对于所有的障碍密度(案例 a,ev = 0.01 ± 0.01; 案例 b,0.01 ± 0.01; 案例 c,0.01 ± 0.01) ,nmpc 群的速度误差较小,且在 pf 群中随着障碍密度的增大而增大(案例 a,ev = 0.08 ± 0.07; 案例 b,0.21 ± 0.11; 案例 c,0.25 ± 0.11)。因此,当障碍物密度增加时,pf 群的任务完成时间增加(案例 a,t = 21.56 ± 0.81 s; 案例 b,25.35 ± 2.64 s; 案例 c,27.48 ± 2.34 s) ,而 nmpc 群的任务完成时间较短,在不同密度下几乎保持不变(案例 a,t = 20.47 ± 0.22 s; 案例 b,20.54 ± 0.21 s; 案例 c,20.72 ± 0.28 s)。另外,当障碍物密度增加时,pf 群体的顺序也随之恶化(案例 a,φorder = 0.98 ± 0.03; 案例 b,0.92 ± 0.08; 案例 c,0.81 ± 0.08) ,但对于 nmpc 群体,它几乎保持不变(案例 a,φorder = 0.99 ± 0.01;
汇总的性能结果总结在补充表 5 中。
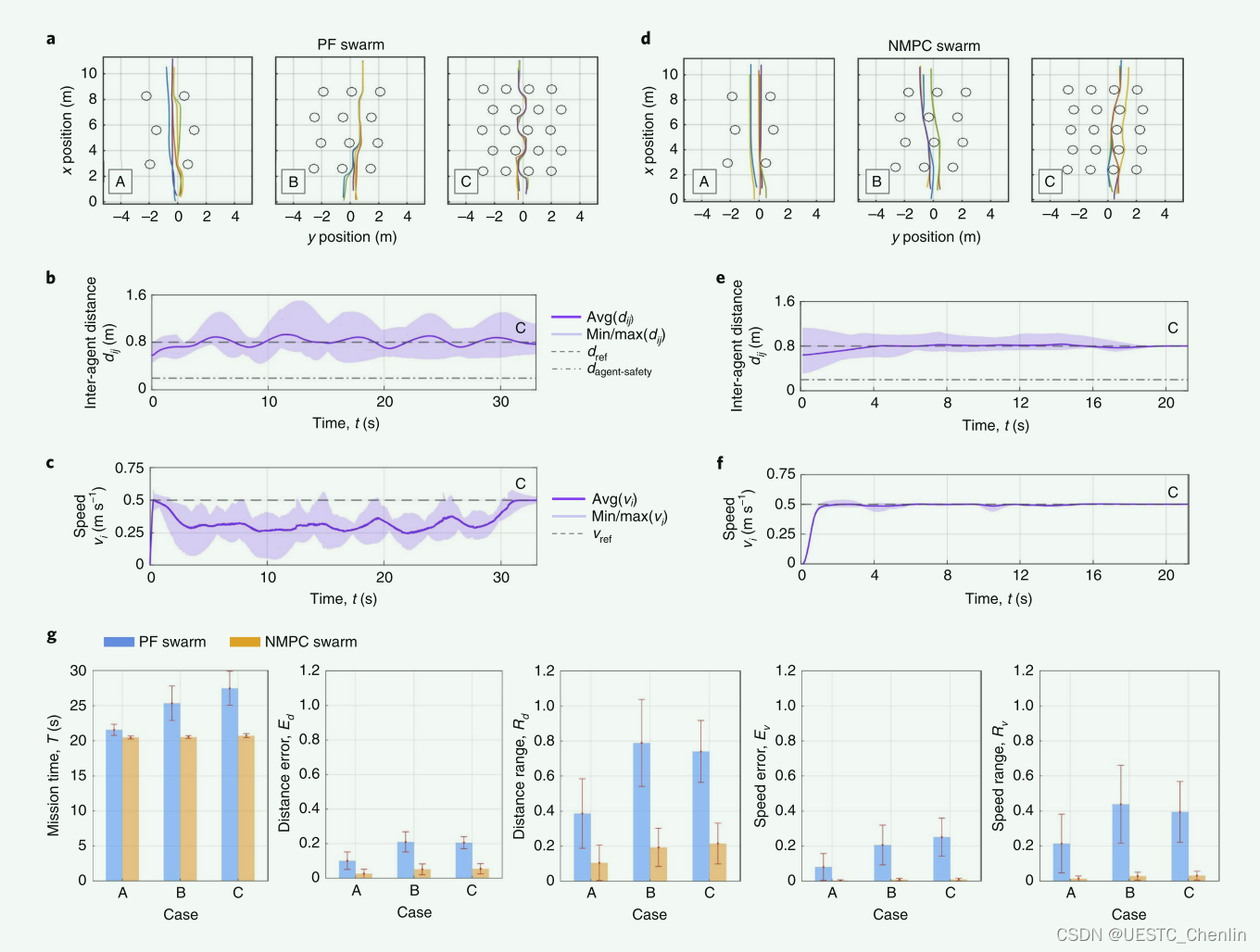
图3:不同障碍物密度环境中 PF 和 NMPC 集群部署的比较。 a,d, PF (a) 和 NMPC (d) 群在具有三种不同障碍物密度的环境中的 3D 模拟轨迹的俯视图。 密度从左到右增加(案例 A,0.06;案例 B,0.12;案例 C,0.20)(补充视频 1)。 b,c, 情况 C. e, f, 情况 C. g 中 NMPC 群的agent间距离 (b) 和速度 (c), 在案例 A、B 和 C 中 PF(蓝色)和 NMPC(橙色)群模型的 10 次随机模拟的汇总结果(平均值和标准偏差)。
可扩展到不同的agent间距离和速度。我们评估了建议的NMPC模型对不同首选agent间距离值的可伸缩性(案例A,dref) = 0.5 M案例B,1.0 M案例C,1.5 M图4a-c)和速度(情况A,vref = 0.5 M s−1.案例B,1.0 M s−1.案例C,1.5 M s−1.图4d–f)在相同的环境条件下。我们分析了swarm的agent间距离和速度,并量化了它们各自的误差和范围。结果表明,在不同的agent间距离水平下,群agent间距离收敛到具有可比误差的首选值(案例A,Ed) = 0.05 ± 0.06; 案例B,0.01 ± 0.02; 案例C,0.02 ± 0.03; 图4b)。在这三种情况下,swarm的速度误差几乎为零(图4c),并导致了类似的任务时间(情况A、T) = 20 s案例B,21岁 s案例C,21.2 s) 。我们没有观察到碰撞。对于速度可扩展性的实验,在三种情况下(图4e),速度误差Ev接近于零,而任务时间随着速度的增加而减少(情况A,T) = 20.2 s案例B,10.5 s,案例 C,75 秒)。 然而,情况 C 中agent间距离的可变性(Rd = 0.46 ± 0.05)高于情况 A(Rd = 0.13 ± 0.11)和 B(Rd = 0.19 ± 0.03)(图 4f)。 事实上,当智能体绕过场景中间的障碍物时,它们会重新排列并增加距离。 在这些实验中,我们也没有观察到碰撞。 PF 群的比较结果显示在补充图 1 中。补充图 2 中提供了每个优选的agent间距离和速度值以及 PF 和 NMPC 模型的随机模拟的汇总结果 以及补充表 6 和 7。
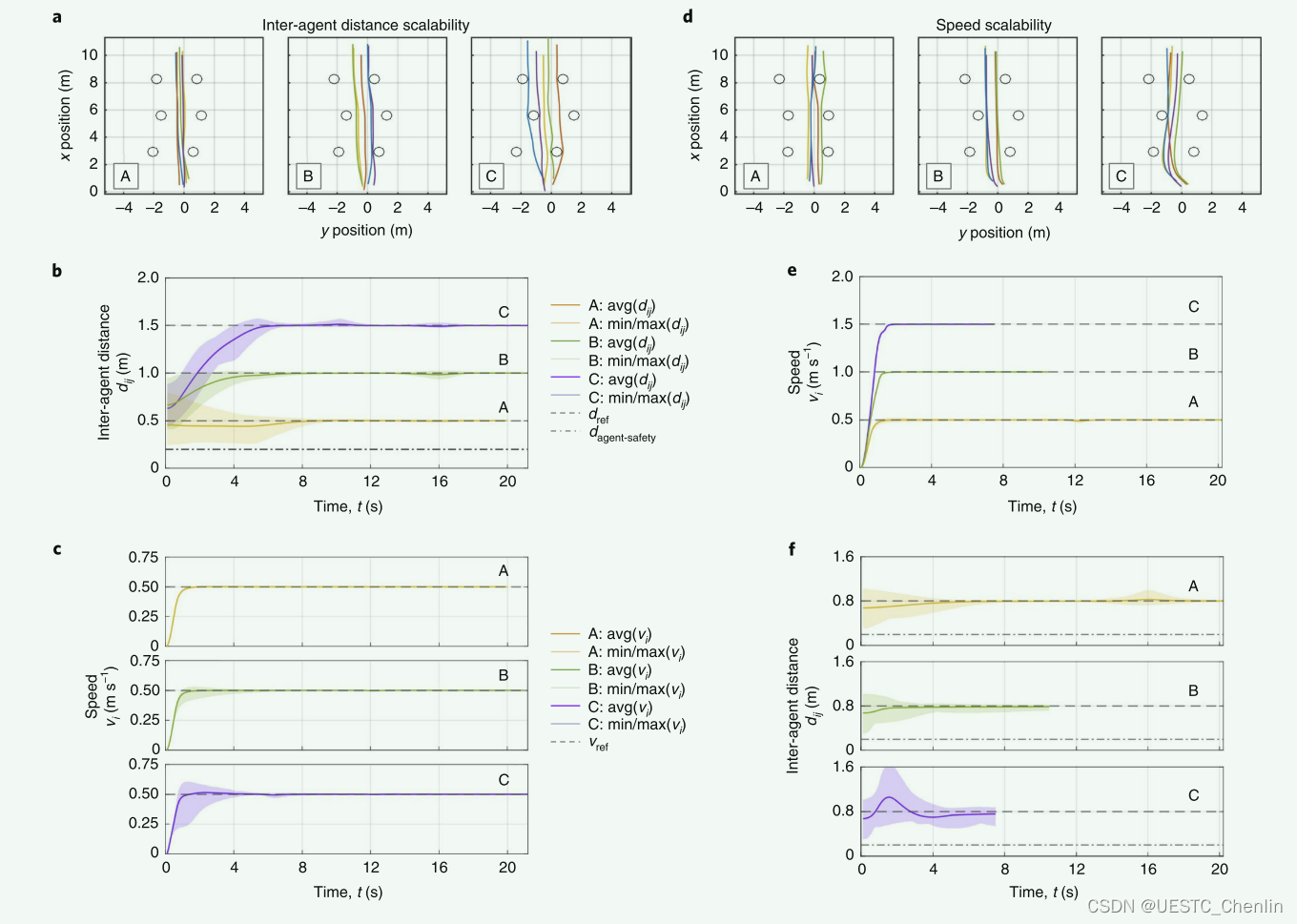
图4: NMPC 群在agent间距离和速度方面的可扩展性。 a-c,对于三个首选距离值(案例 A,dref = 0.5 m;案例 B,1.0 m;案例 C,1.5 m)的 NMPC 群模型agent间距离的可扩展性的模拟结果。 d-f,三个首选速度值(情况 A,vref = 0.5 m s-1;情况 B,1.0 m s-1;情况 C,1.5 m s-1)的群体速度可扩展性的模拟结果。 a,d,群体 3D 轨迹的顶视图(补充视频 1)。 b,c,agent间距离可扩展性实验的agent间距离和速度。 e,f,用于速度可扩展性实验的agent间距离和速度。 六种情况的障碍物大小和密度相同。
用真正的无人机进行验证。我们在室内运动捕捉竞技场的五个商用四旋翼机上验证了NMPC群,我们在“PF和NMPC空中群的比较”一节中重建了环境(图5a)。我们测量了真实的飞行性能,并将其与仿真性能进行了比较。真正的无人机达到了首选的agent间距离dref = 0.8 Ed= 0.12 ± 0.02)与模拟误差(Ed)相当 = 0.11 ± 0.02)(图5c)。
但是,速度误差略高(Ev = 0.07 ± 0.03)比模拟中的(Ev = 0.02 ± 0.2)(图5d)。真实蜂群中的高速误差可以用较小的通信延迟和由于无人机彼此接近和障碍物造成的空气湍流来解释。真实蜂群的order(Φorder=0.97±0.04)与模拟蜂群的阶数(Φorder=0.98±0.02)相当(图5e),在这两种情况下,我们都没有观察到碰撞(Φorder=0.97±0.04) = 1± 0,Φobs-safety = 1 ± 0; 图5f)。
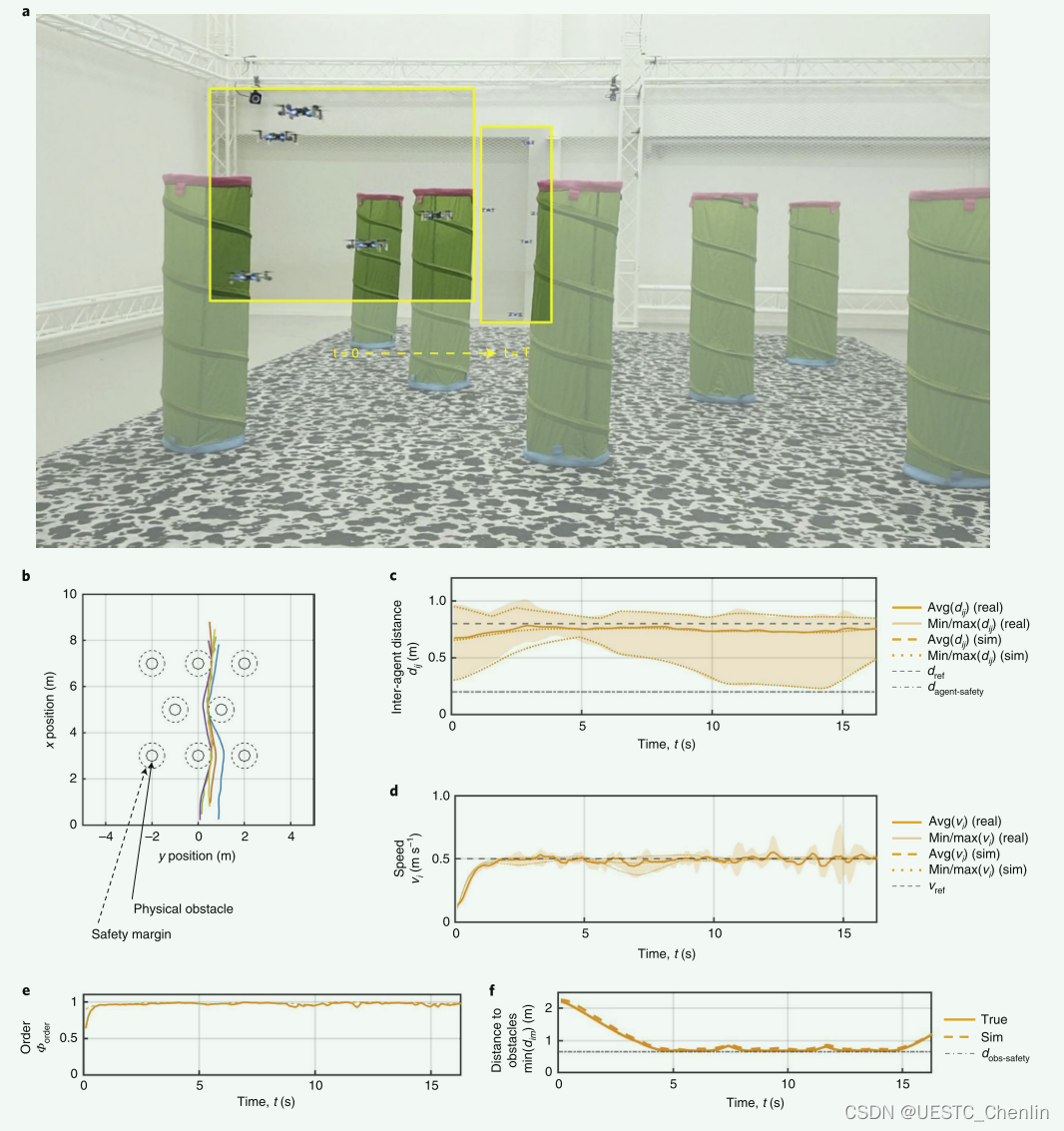
图5:NMPC swarm 的真实世界实验。 a,由五个商业手掌大小的四旋翼飞机组成的蜂群,在动作捕捉舞台上飞过圆柱形障碍物。 群从前景 (t = 0 s) 穿过区域到背景 (t = T),同时保持凝聚力并避开障碍物(补充视频 2)。 b,无人机轨迹的俯视图。对现实世界部署而言,我们挑选半径为0.3米的障碍,比仿真中0.55米半径障碍物更小,从物理障碍物引入0.25 m的安全裕度(补充表4)。c、 真实群(实线和阴影区域)和仿真群(虚线和虚线区域)的平均agent间距离和范围。d、 真实蜂群(分别为实线和阴影区域)和仿真蜂群(分别为虚线和虚线)的平均速度和范围。e、 蜂群对真实(实线)和仿真(虚线)蜂群的顺序。f、 蜂群到障碍物的距离。真实数据(实线)相对于仿真数据(虚线)的偏移是由安全裕度引起的。
3.讨论
本文显示,与基于PF的最新模型相比,NMPC模型在杂乱的环境中实现了更快、更同步的飞行。NMPC群报告在杂乱的环境中没有冲突,它们更好地达到并保持目标速度,并且它们保持更有序和凝聚力。预测控制器给机器人空间群带来的好处证实了与生物系统的平行,在生物系统中个体被认为可以通过未来的状态projection19来增强它们的同步。在机器人技术中,NMPC方法的优点对于需要在拥挤场景中导航的应用是有希望的,例如城市环境勘探、倒塌建筑物或森林。此外,基于视觉的群体可以从所有这些特征中受益,因为无人机的交互视觉检测的可靠性很大程度上取决于它们的距离,并且NMPC群体表明它们可以更好地维持目标交互机间距离[22、47]。总之,预测方法可以提高群体操作的自主性以及群体和环境的安全性,这两者都是建立公众对使用swarm的信心的基本要素[48]。
对于目前的实验,我们依赖于一个中央计算节点,该节点仅根据本地交互在运行时生成agent的运动。 这种假设简化了实施,因为它只需要一台计算机作为地面控制站,而不是agent携带的几台机载计算机。 然而,NMPC 模型比 PF 模型需要更多的计算资源,并且随着群体规模的扩大而恶化。 开发一个分散的 NMPC 模型将很有趣,其中计算成本与agent的数量无关。 在这个方向上的工作将使我们能够将我们的方法扩展到更大的群体。
最后,我们的研究结果推动了未来的工作,以解决动态环境中鲁棒群体模型设计中的研究问题。由于其递归结构,MPC控制器提供了一种很有前途的方法,允许在具有移动障碍物的场景中导航。然而,将所提出的模型推广到动态环境需要对稳定性条件进行理论和数值研究,以及对障碍物运动的可靠估计。
4.方法
在这项工作中,我们考虑一群 n 个agent标记为 i ∈{1,... ,n }。系统的位置、速度和控制输入分别用 pi,vi,ui ∈ R3表示。设 表示两个agent i 和 j 之间的中心距离,其中
代表欧氏范数。我们用一个有向感知图 g = (v,e)对群进行建模,其中顶点集 v = {1,... ,n }表示agent,边集
包含agent对(i,j)∈ e,我们用
表示agent-i 在 g 中的邻居,
表示集的基数。我们利用拓扑范围来定义邻集,即邻集包含agent i 的 | ni | 最近邻集,这种选择方便了保持邻集的基数不变,而且对于生物群也是成立的。其他研究已经研究了不同的邻域方法基于 voronoi 划分或特别吸引拓扑。然而,我们放弃了这些方法,因为它们会在我们的预测群模型的目标函数中引入不连续性,或者它们会将群体限制在一个固定的队形中。为了再现森林般的环境,我们引进了 m 个圆柱形障碍物,标记为 m ∈{1,... ,m }。在仿真中,我们用微弱的agent-i 与圆柱 m 的对称轴之间的距离来表示,agent的动力学过程是以离散时间再现的。设 pi (k) ,vi (k) ,ui (k)∈ r3分别是 t (k) = kdt 时第三智能体的位置、速度和控制输入。为了简便起见,在下面的代码中,当从上下文中清除时,我们将省略时间依赖项。
PF集群模型。
我们提出的 PF 模型的灵感来自最先进的模型,该模型允许无人机群在狭窄环境中导航[24]。 在原始模型中,我们包括了斥力规则以防止无人机间碰撞、摩擦以减少速度振荡,以及避障规则以避免与障碍物碰撞。 对于这些规则的数学定义,我们请读者参考 ref[24] 。 为了确保在开放环境中进行目标导向的飞行,我们添加了两条规则:迁移以提供首选速度向量,以及凝聚力以使agent保持在一起。 我们用 表示迁移速度,其中 vref 是首选速度,uref 是首选方向。 然后,对于每个agent都相等的迁移项对应于

如果当相邻agent比首选距离 dref 更近时排斥是活跃的,并将它们推得更远,那么当它们比 dref 更远时,凝聚力是活跃的,以使它们更接近。 当两个主体正好处于距离 dref 时,排斥和凝聚力是不活跃的。 邻居 j 对agent i 施加的内聚力为 

NMPC集群模型。
对于我们的NMPC swarm模型,我们定义了类似于PF模型的行为规则。这些规则被编码为成本函数的四项,包括分离、推进、方向和控制代价。在每个时间步,每个agent更新其邻居集,并仅考虑相邻agent计算与四个群规则相关的成本。然后,将所有agent的贡献汇总到一个全局成本函数中,该函数定义了我们的集中式模型。在“agent动力学”一节中介绍的agent动力学模型确定了agent状态在一个称为预测视界的恒定时间窗口内的演化。这些预测通过全局成本函数进行优化,其解给出了所谓控制范围内的群控制输入(补充图3)。预测和控制范围是有限的,并且在每个时间步都会向前移动。
仿真设置。我们在MATLAB中借助acados实现了NMPC模型,这是一个用于快速非线性最优控制的开源库。该软件依赖于C代码的生成来加速实时应用程序中的计算速度。系统动力学和问题的约束在预测视界上离散,得到一个结构化非线性规划(NLP)。然后,通过序列二次规划(SQP)对NLP进行逼近,迭代地求解凸二次规划(QP)子问题。在应用一个压缩步骤后,一个基于内点(IP)方法的线性代数求解器HPIPM找到了子问题的解53。我们在戴尔Precision Tower上运行仿真,使用3.6ghz英特尔酷睿i7-7700处理器和16gb2400MHz内存,我们将SQP的最大迭代次数设置为7,QP的最大迭代次数设置为7。
无人机实验设置。在我们的实验中,我们使用了五个Bitcrze Crazyflie 2.1四旋翼(图1 c) 。每个四旋翼都配有一个三轴加速度计、一个三轴陀螺仪、一个压力传感器和一个用于承载被动反射标记的标记平台。我们使用一个运行在168兆赫兹的STM32F4微控制器,在它上同时运行状态估计和低电平控制。使用OptiTrack运动捕获系统跟踪机器人的位置。无人机的所有加速度指令都在一台计算机上使用我们的NMPC模型进行计算,集成到位置和速度指令中,并通过无线电链路与每个无人机的估计位置一起向蜂群广播。无人机使用估计位置来执行低级控制回路并跟踪发送的命令。利用Agent的动力学模型对群体模型的位置和速度进行了预测。为了保证NMPC群模型对硬件实验的可转移性,我们将最大SQP数减少到4。这足以在小于0.1秒内计算NLP的收敛解。

















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









