







Tesollo三指灵巧手(DG-3F)凭借其技术性能,成为科研院校在机器人研究和教育实践中的理想工具。其设计满足复杂任务的实际需求,提供高效且灵活的抓取能力,助力科研与教学效率提升。

Tesollo三指灵巧手核心技术亮点
多轴关节与独立指头运动
DG-3F三指灵巧手采用多轴关节机制,每根手指可独立运动,灵活适应狭小空间和复杂操作环境。精准的运动控制使其在不同操作条件下保持高效性能,拓展了机器人研究与应用范围。

复杂物体抓取能力
独立指头运动使DG-3F三指灵巧手能轻松抓取复杂或不规则物体,如圆形、方形和异形物品。通过调整手指角度和力度,实现稳定抓取,适用于高精度操作任务,如电子元件组装和精密仪器搬运,提升科研与教学的灵活性与效率。
Tesollo 三指灵巧手 DG-3F,带你见证灵巧手连吸带抓的绝妙与十拿九稳的厉害。Tesollo 三指灵巧手 DG-3F无论是精准抓取还是连贯吸附抓取,它都
Tesollo三指灵巧手材料与设计创新
钛合金关节耐用性
DG-3F关节采用钛合金材料,具备高耐用性和抗疲劳性能,可承受高强度重复操作,适应恶劣工业环境,延长使用寿命并降低维护成本,为长期科研项目提供稳定支持。
Tesollo 三指灵巧手 DG-3F:拧紧操作显卓越,指尖吸盘创非凡,移液操作提效率
高度集成通信协议
支持Modbus RTU和TCP/IP协议
DG-3F三指灵巧手内置通信协议,支持Modbus RTU和TCP/IP,兼容多种工业控制系统,实现快速数据传输和实时控制。标准接口设计缩短了抓手集成部署时间,便于科研院校快速搭建实验平台。
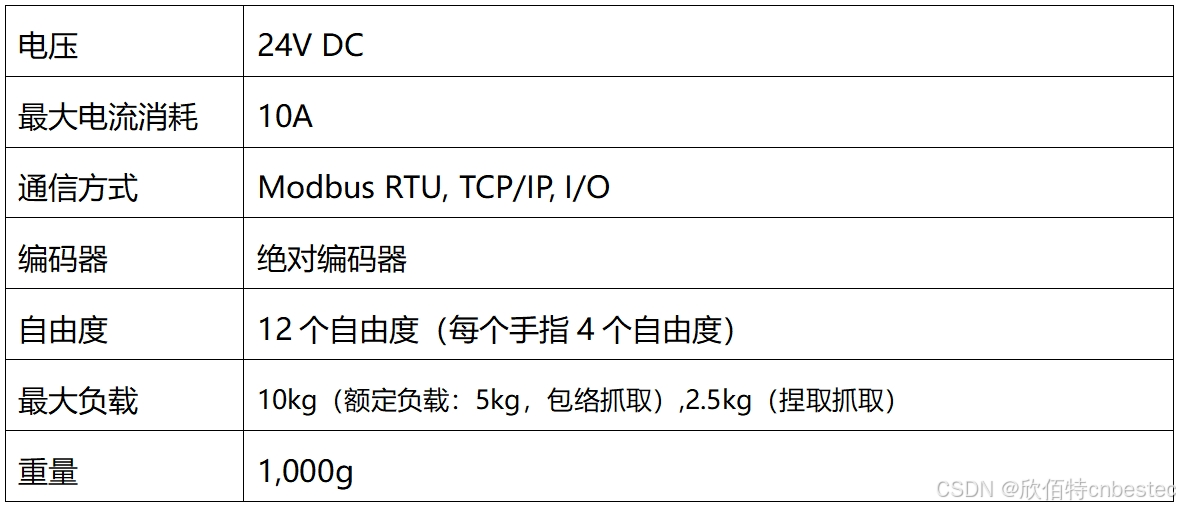
绝对编码器精确定位
配备高精度绝对编码器,实时监测手指位置并提供精确反馈,确保抓手操作的高精度和稳定性,尤其在重复性任务中表现出色,提升科研与教学的操作可靠性与效率。
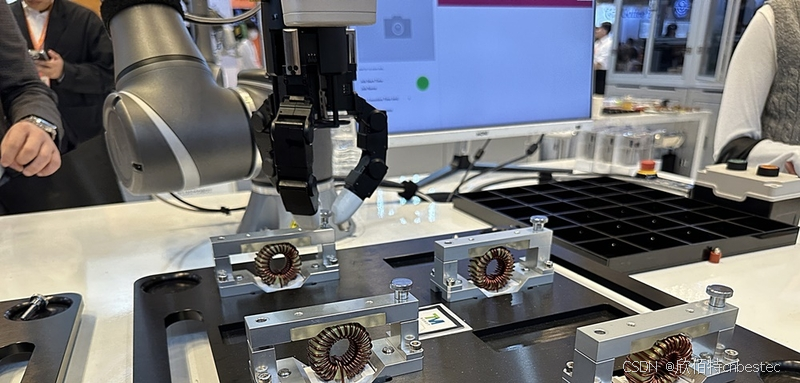
Tesollo三指灵巧手集成与应用
DG-3F三指灵巧手无缝集成Techman Robot等协作机器人,形成高效自动化解决方案。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









