







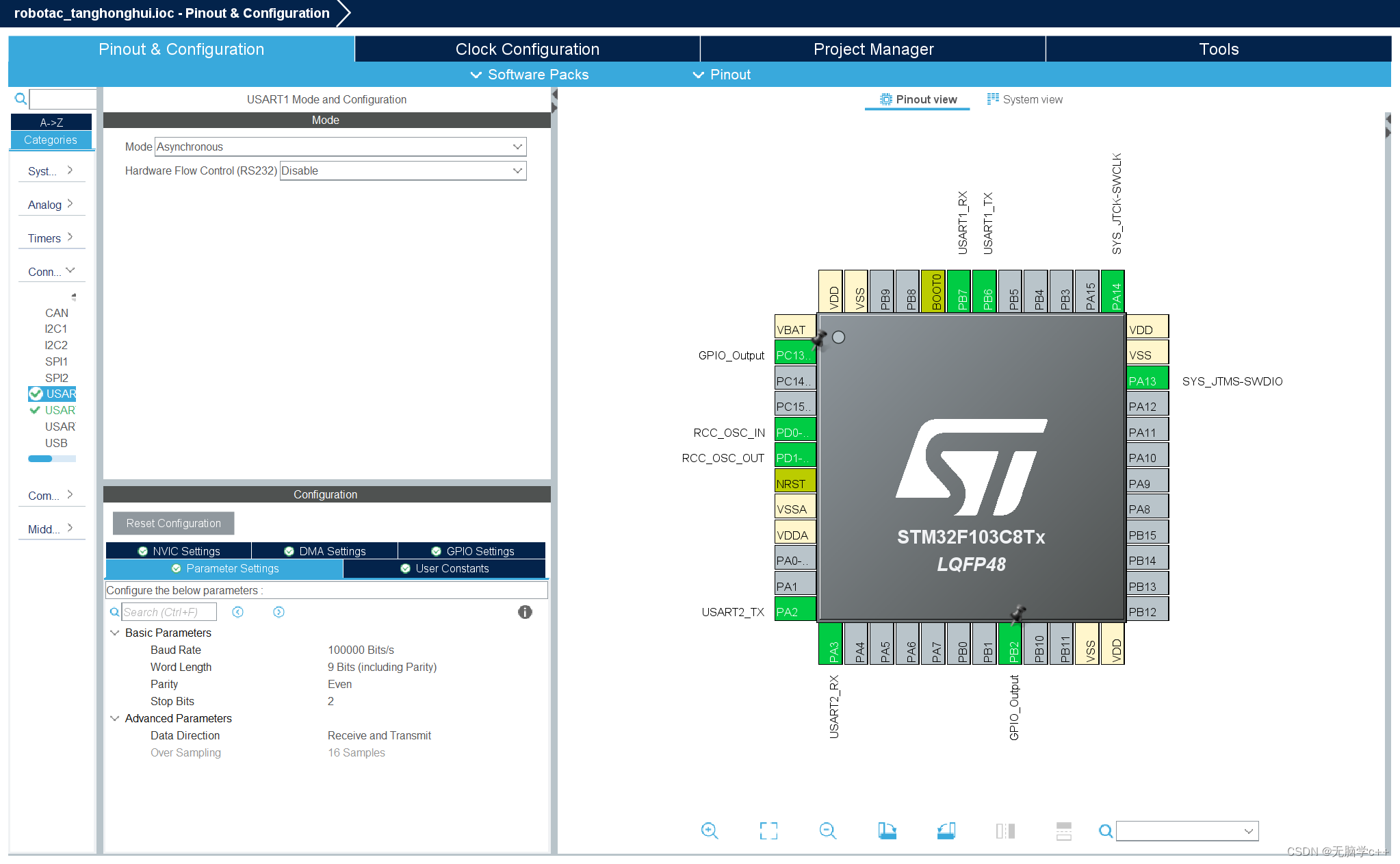
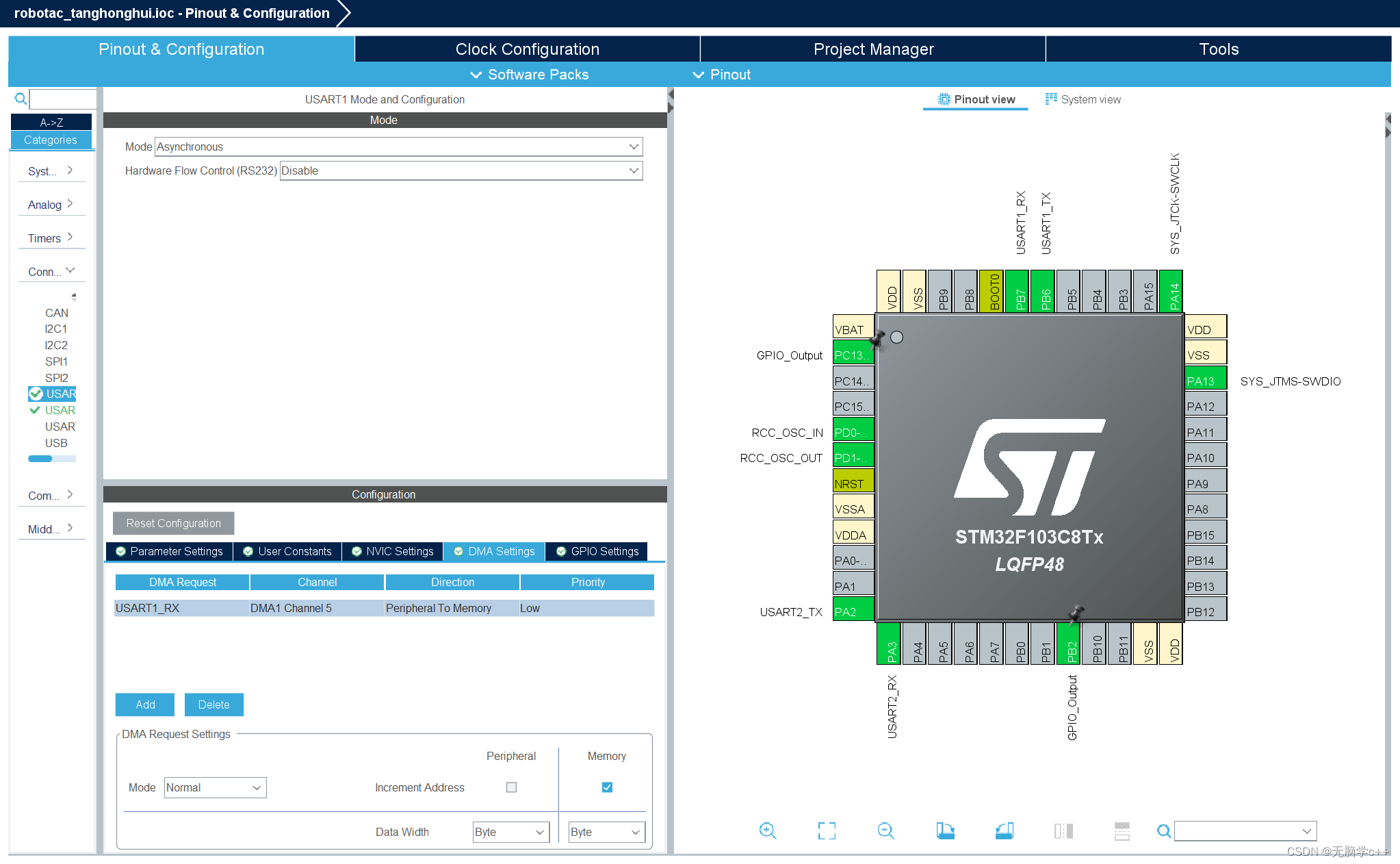
1. 基本配置
串口波特率:100k,9位数据位,偶校验,2位停止位,利用dma空闲中断进行接收数据和处理数据
接收函数
int8_t BSP_UART_IDLE_PollData(UART_HandleTypeDef *huart, struct RF207S_SBUS_DataStructure *rf207_sbus_data)
{
int8_t nret = 0;
if (Uart_Receive_Data.rxok == 0) //没有接收完就退出
{
nret = -1;
}
else
{
if (Uart_Receive_Data.rxlen < 25) //帧不完整
{
nret = -2;
}
else if (Uart_Receive_Data.rxbuf[0] != 0x0f || Uart_Receive_Data.rxbuf[24] != 0x00) //帧错误
{
nret = -3;
}
if (nret == 0)
{
//遥控器的取值范围:-100 ---->100 返回值的范围0----100
// Min:354 Max:1696 ----->1342 chx-353/1342. == y*100
rf207_sbus_data->ch1 = (((int16_t) Uart_Receive_Data.rxbuf[2] << 8) + ((int16_t) Uart_Receive_Data.rxbuf[1])) & 0x07ff;
rf207_sbus_data->ch1 = (rf207_sbus_data->ch1-353)*100/1342.;
rf207_sbus_data->ch2 = (((int16_t) Uart_Receive_Data.rxbuf[3] << 5) + ((int16_t) Uart_Receive_Data.rxbuf[2] >> 3))& 0x07ff;
rf207_sbus_data->ch2 = (rf207_sbus_data->ch2-353)*100/1342.;
rf207_sbus_data->ch3 = (((int16_t) Uart_Receive_Data.rxbuf[5] << 10) + ((int16_t) Uart_Receive_Data.rxbuf[4] << 2) + ((int16_t) Uart_Receive_Data.rxbuf[3] >> 6)) & 0x07ff;
rf207_sbus_data->ch3 = (rf207_sbus_data->ch3-353)*100/1342.;
rf207_sbus_data->ch4 = (((int16_t) Uart_Receive_Data.rxbuf[6] << 7) + ((int16_t) Uart_Receive_Data.rxbuf[5] >> 1))& 0x07ff;
rf207_sbus_data->ch4 = (rf207_sbus_data->ch4-353)*100/1342.;
rf207_sbus_data->ch5 =(((int16_t)Uart_Receive_Data.rxbuf[9]<<9) + ((int16_t)Uart_Receive_Data.rxbuf[8]<<1) + ((int16_t)buf[7]>>7)) & 0x07ff;
rf207_sbus_data->ch5 = (rf207_sbus_data->ch5-353)*100/1342.;
rf207_sbus_data->ch6 =(((int16_t)Uart_Receive_Data.rxbuf[10]<<6) + ((int16_t)Uart_Receive_Data.rxbuf[9]>>2)) & 0x07ff;
rf207_sbus_data->ch6 = (rf207_sbus_data->ch6-353)*100/1342.;
rf207_sbus_data->ch7 =(((int16_t)Uart_Receive_Data.rxbuf[11]<<3) + ((int16_t)Uart_Receive_Data.rxbuf[10]>>5)) & 0x07ff;
rf207_sbus_data->ch7 = (rf207_sbus_data->ch7-353)*100/1342.;
rf207_sbus_data->ch8 =(((int16_t)Uart_Receive_Data.rxbuf[13]<<8) + (int16_t)Uart_Receive_Data.rxbuf[12]) & 0x07ff;
rf207_sbus_data->ch8 = (rf207_sbus_data->ch8-353)*100/1342.;
rf207_sbus_data->ch9 =(((int16_t)Uart_Receive_Data.rxbuf[14]<<5) + ((int16_t)Uart_Receive_Data.rxbuf[13]>>3)) & 0x07ff;
rf207_sbus_data->ch9 = (rf207_sbus_data->ch9-353)*100/1342.;
rf207_sbus_data->ch10 =(((int16_t)Uart_Receive_Data.rxbuf[16]<<10) + ((int16_t)Uart_Receive_Data.rxbuf[15]<<2) + ((int16_t)Uart_Receive_Data.rxbuf[14]>>6)) & 0x07ff;
rf207_sbus_data->ch10 = (rf207_sbus_data->ch10-353)*100/1342.;
}
Uart_Receive_Data.rxok = 0;
__HAL_UART_ENABLE_IT(huart, UART_IT_IDLE); //使能串口空闲中断
memset(Uart_Receive_Data.rxbuf, 0, UART_RECEIVE_IDLE_RX_MAXLEN);
HAL_UART_Receive_DMA(huart, Uart_Receive_Data.rxbuf, UART_RECEIVE_IDLE_RX_MAXLEN); //开启串口DMA接收
}
return nret;
}
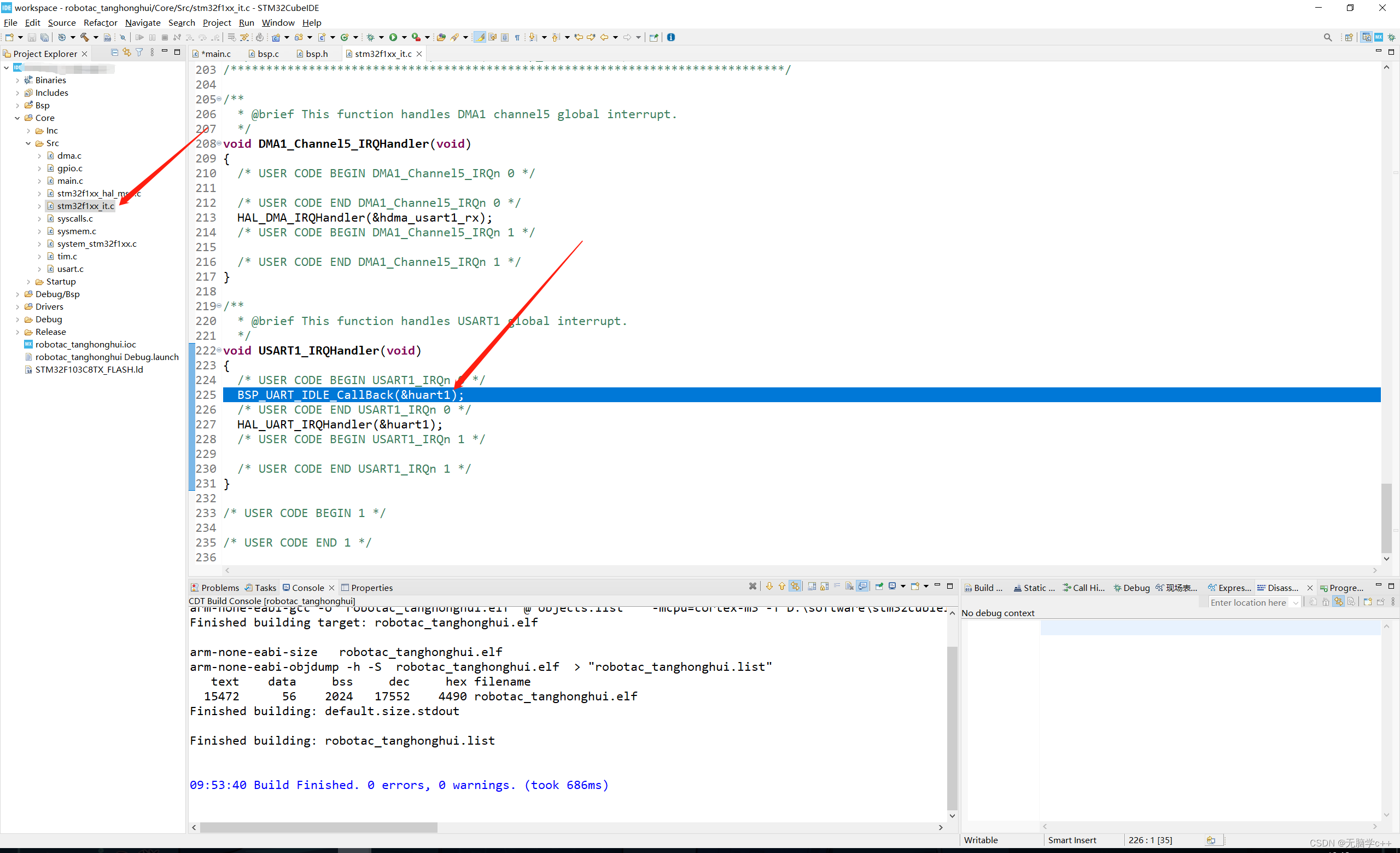
空闲中断函数(将函数放在默认的空闲中断之前)记得在it中断文件中包含该函数的头文件
void BSP_UART_IDLE_CallBack(UART_HandleTypeDef *huart)
{
if ((__HAL_UART_GET_FLAG(huart, UART_FLAG_IDLE) != RESET))
{
HAL_UART_DMAStop(huart);
__HAL_UART_CLEAR_IDLEFLAG(huart);
Uart_Receive_Data.rxlen = UART_RECEIVE_IDLE_RX_MAXLEN - __HAL_DMA_GET_COUNTER(huart->hdmarx);
Uart_Receive_Data.rxok = 1;
}
}














 1453
1453











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









