





After I made my Webcam Cart and blogged about it a package I'd forgotten about arrived. It was a cheap "Zeikos ZE-WA37S 37mm 0.45X Wide Angle Lens." Only $10. I've looked all over for wide-angle webcams and they just don't exist. Over the counter webcams have a very narrow field of view.
在制作好我的网络摄像头购物车并将其发布到博客后,我忘记了一个包裹。 那是便宜的“ Zeikos ZE-WA37S 37mm 0.45X广角镜头” 。 才$ 10。 我到处都在寻找广角摄像头,但它们根本不存在。 在柜台上,网络摄像头的视野非常狭窄。
I started with my favorite webcam, an amazing value, the Lifecam Cinema HD. I've got 4 of these. Now, the wide angle lens has a large opening, about an inch and a half, while the Lifecam is maybe an inch in diameter. I needed something to build up the diameter in such a way that it'd hold the wide angle lens in position while avoiding ruining the camera itself.
我从我最喜欢的网络摄像头开始,这是一个惊人的价值,即Lifecam Cinema HD 。 我有四个。 现在,广角镜有一个大开口,大约一英寸半,而Lifecam的直径可能是一英寸。 我需要一些东西来增加直径,以便将广角镜固定在适当的位置,同时避免损坏相机本身。
How? Electrical tape. Lots of it. I wrapped it around and around until it could offer enough outward tension to keep the lens on tightly.
怎么样? 电工胶带。 很多。 我将它缠起来直到它可以提供足够的向外拉力以保持镜头紧紧。
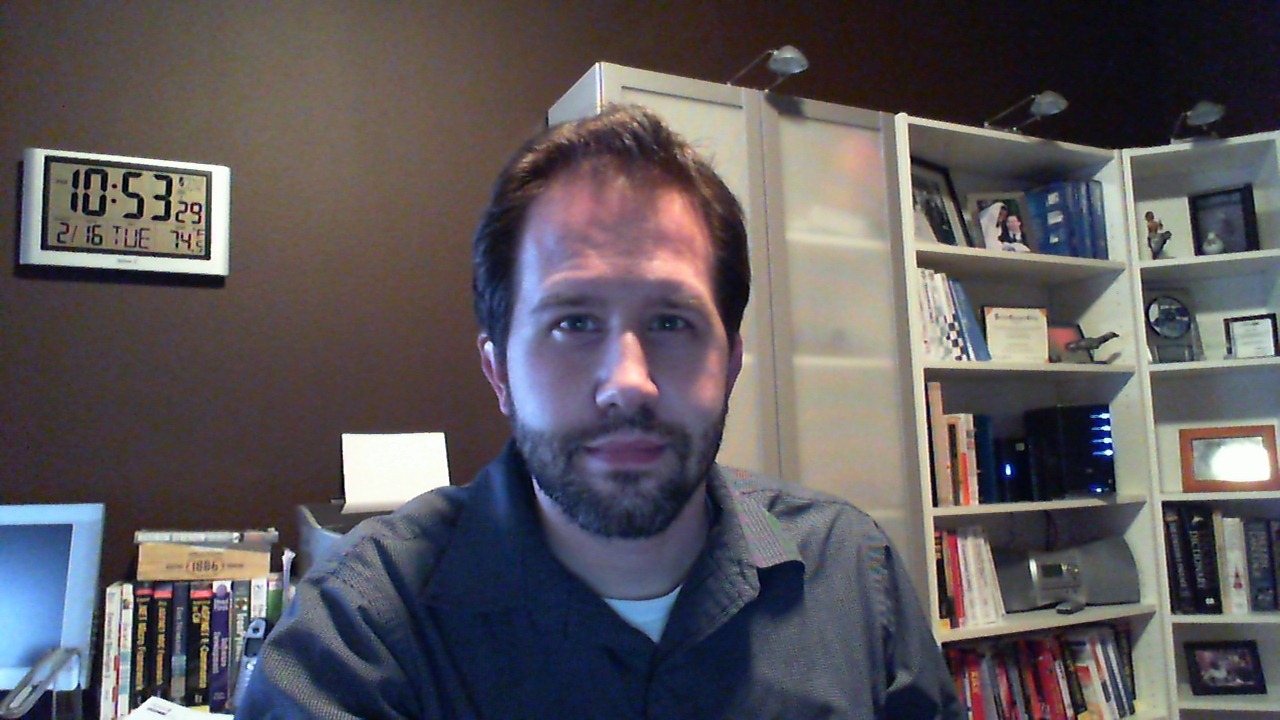
Here's a still shot taken with the Lifecam Cinema HD with the lens it came with.
这是Lifecam Cinema HD附带的镜头的静态照片。
Here's a still shot taken with the same Lifecam Cinema HD with the cheap Zeikos Wide-Angle lens attached. Note the blurriness in the periphery and the slight fish-eye warping in the shelves.
这是与配备廉价Zeikos广角镜的相同Lifecam Cinema HD一起拍摄的照片。 请注意外围模糊不清,架子上略有鱼眼翘曲。
The Lifecam is ideal for this kind of hack because it has a built in AutoFocus that REALLY works hard to keep things focused. I'll be using this for meetings and "getting a sense of the room" since I can't afford a $3000 "Roundtable" camera. I haven't measured it, but I fell I'm getting at least 100 degrees or more of field of view (my gut) so I think it's a good tradeoff of visual acuity for seeing a LOT more of the room for only $10.
Lifecam是此类黑客的理想之选,因为它具有内置的AutoFocus,可真正有效地使事情集中。 我将用它来开会和“感觉房间”,因为我买不起3000美元的“圆桌”相机。 我没有测量它,但是我跌倒了,我至少获得了100度以上的视野(我的直觉),所以我认为以10美元的价格看到更多的房间是对视敏度的一个很好的权衡。
Thoughts?
有什么想法吗?
翻译自: https://www.hanselman.com/blog/diy-making-a-very-wide-angle-webcam-on-the-cheap















 941
941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}
{kind=link}
{kind=link}