本文介绍了一种快速计算大位移光流的算法,该算法能够在tinystructureswithlargemotions情况下减少误差。通过多尺度框架,在不同尺度上提取信息,并从顶层开始建立种子点的对应关系。
本文介绍了一种快速计算大位移光流的算法,该算法能够在tinystructureswithlargemotions情况下减少误差。通过多尺度框架,在不同尺度上提取信息,并从顶层开始建立种子点的对应关系。
CVPR 2016
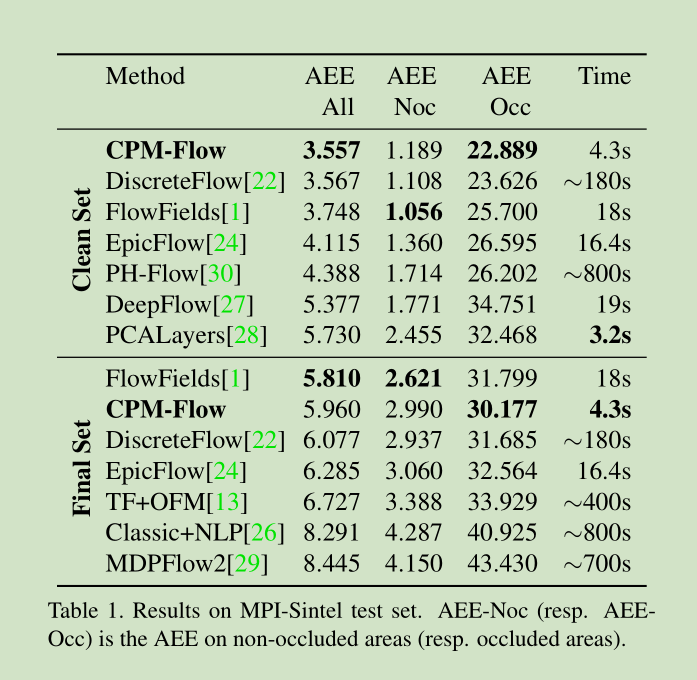
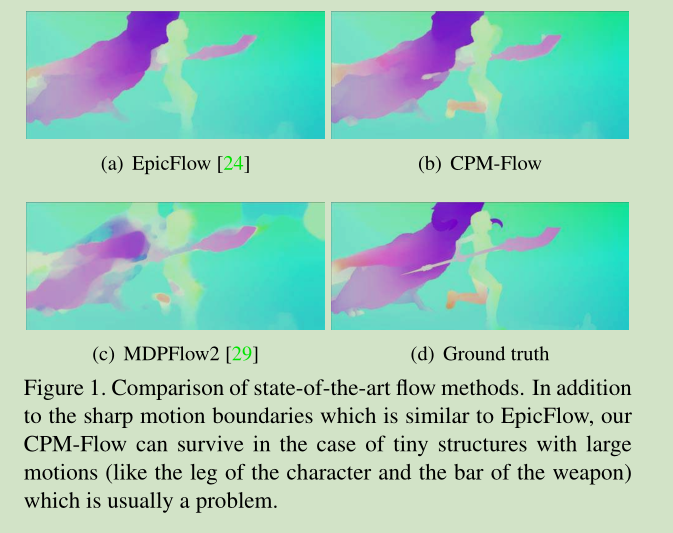
本文提出了一个快速计算大位移光流的算法。
一般的算法在 tiny structures with large motions 情况下容易出现误差。
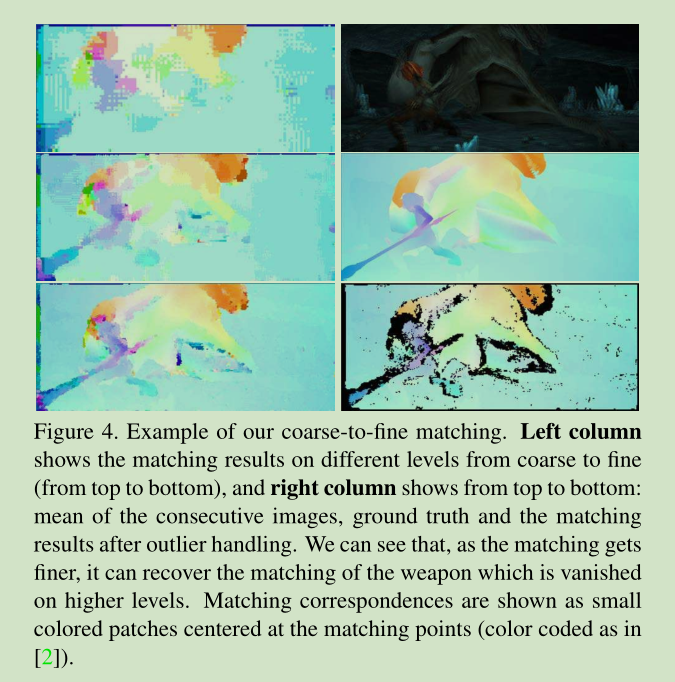
算法采用多尺度框架,不同尺度可以提取出不同的信息。
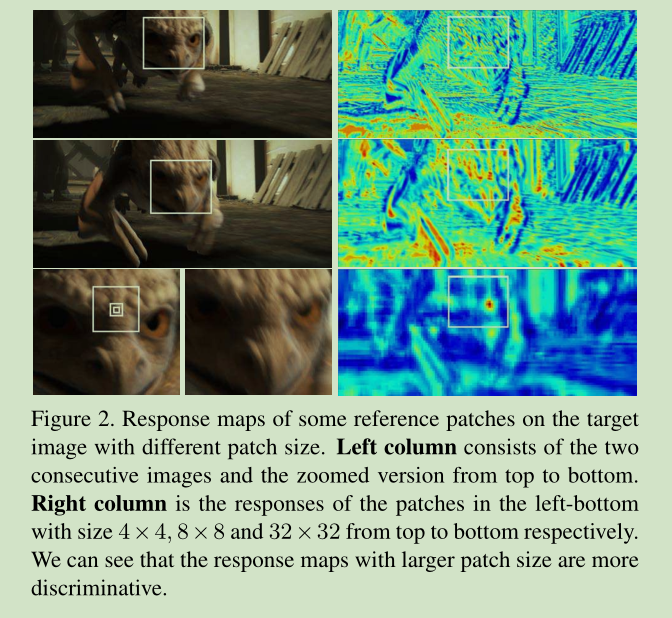

两幅图像 I1,I2,从I1里提取一系列种子点。网格提取,每个d*d区域只有一个种子点。
然后从顶层开始,建立种子点的对应关系。然后根据上层的对应关系计算下一层的对应关系。

CVPR 2016
本文提出了一个快速计算大位移光流的算法。
一般的算法在 tiny structures with large motions 情况下容易出现误差。
算法采用多尺度框架,不同尺度可以提取出不同的信息。
两幅图像 I1,I2,从I1里提取一系列种子点。网格提取,每个d*d区域只有一个种子点。
然后从顶层开始,建立种子点的对应关系。然后根据上层的对应关系计算下一层的对应关系。
 4889
2479
4889
2479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言