






0. 原理
基于 UV DLP 的 3D 打印机的工作原理是这样的:
UV DLP 是一种使用数字光处理(Digital Light Processing)技术的 3D 打印方法,它利用紫外光(UV)来固化液态树脂,从而形成实体物体。
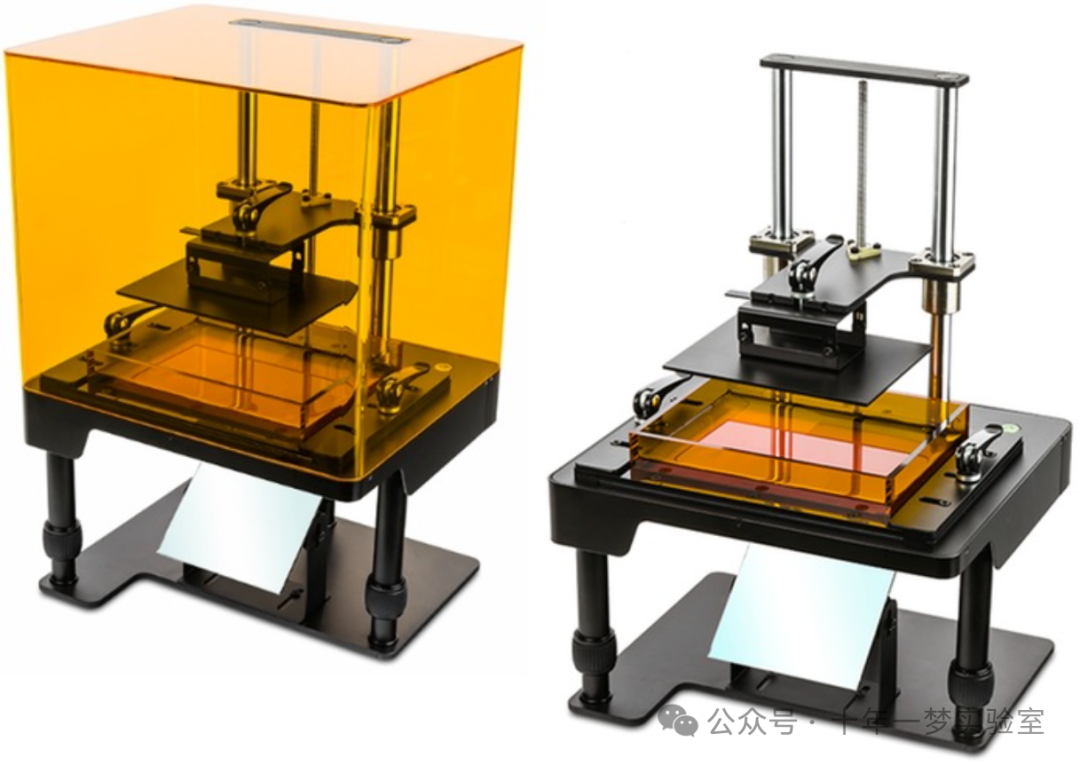
UV DLP 3D 打印机由以下几个主要部件组成:
一个液晶显示器(LCD)或微型镜面器件(DMD),用于控制紫外光的投影。
一个紫外光源,通常是 LED 或激光器,用于发射紫外光。
一个树脂槽,用于存放液态树脂,以及一个平台,用于支撑打印物体。
一个 Z 轴机械结构,用于调节平台的上下移动。
UV DLP 3D 打印机的工作过程如下:
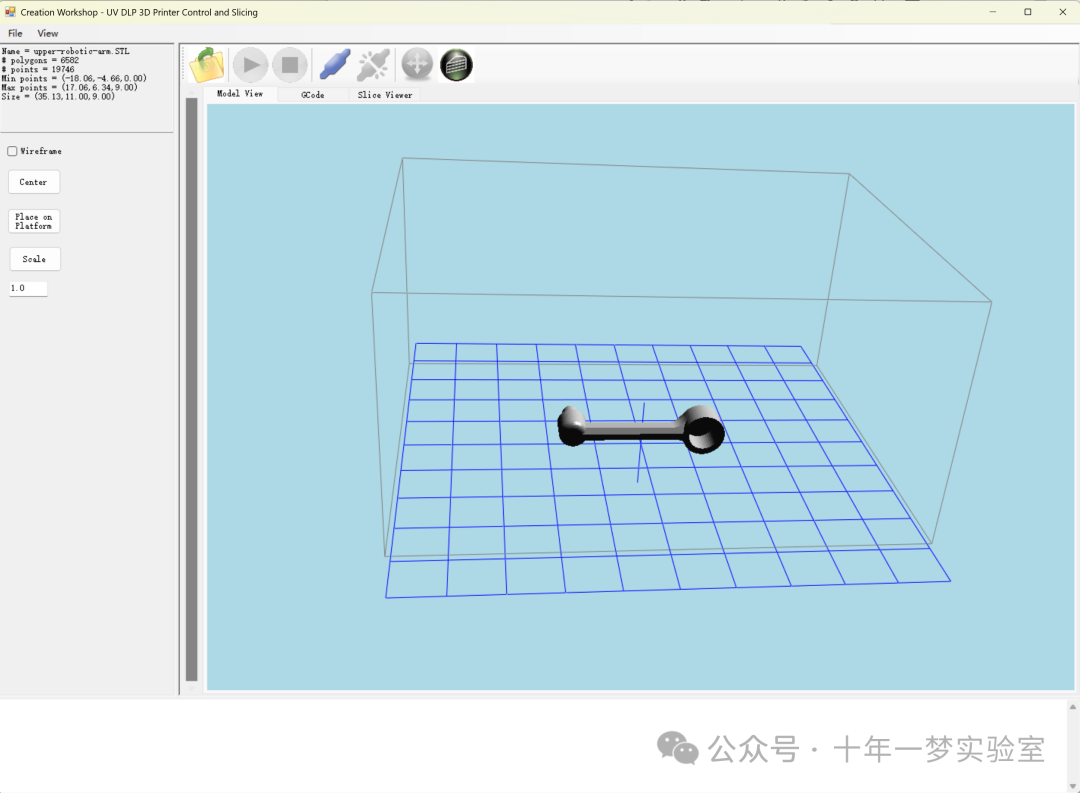
首先,根据 3D 模型的数据,将其切片为一层一层的图像,每一层对应一个紫外光的掩模。
然后,将平台降到树脂槽的最低位置,与树脂表面留出一定的间隙。
接着,将第一层的掩模通过 LCD 或 DMD 投影到树脂表面,使得相应的区域被紫外光照射,从而固化成固态。
紧接着,将平台向上移动一定的距离,等于一层的厚度,同时将树脂槽摇晃一下,使得新的液态树脂填充到平台下方的空隙中。
重复上述步骤,直到打印完所有的层,最后将打印物体从平台上取下,清洗和后处理。
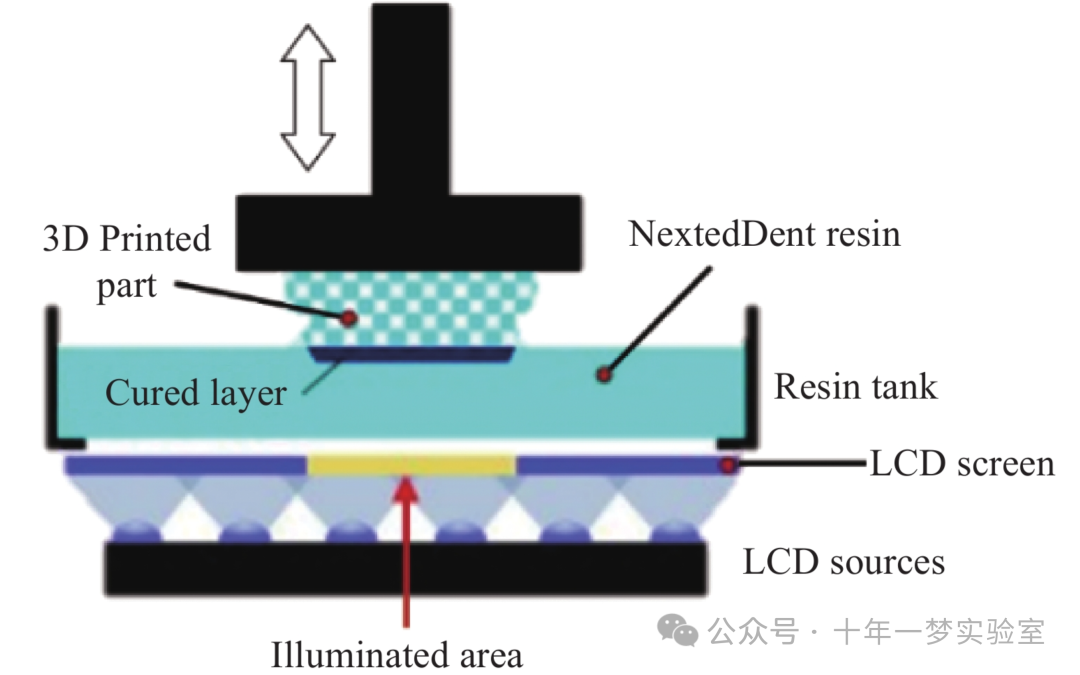
3D打印部件 NextedDent树脂 固化层 树脂罐 LCD屏幕 LCD光源 照亮区域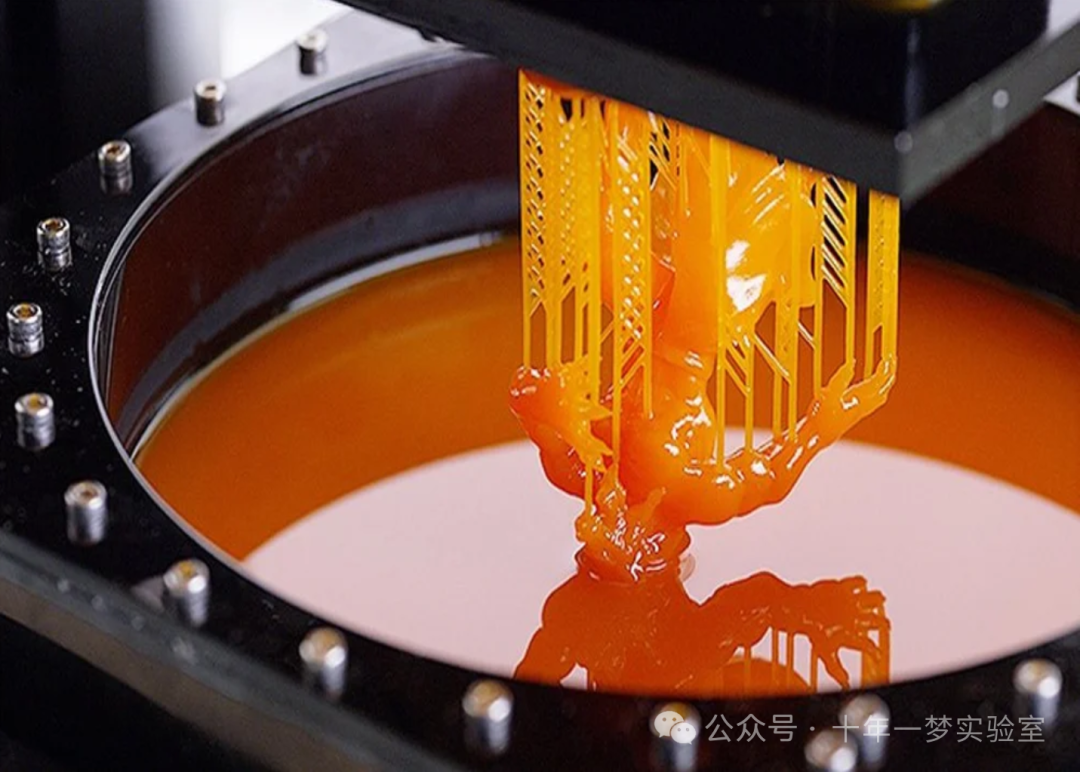
1. GUI
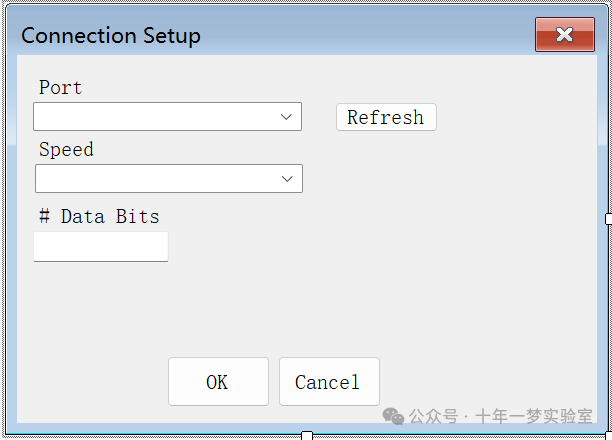
1.1 frmConnection.cs
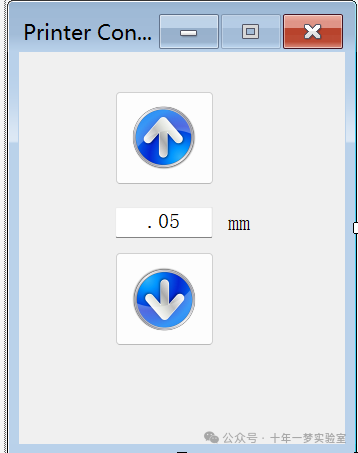
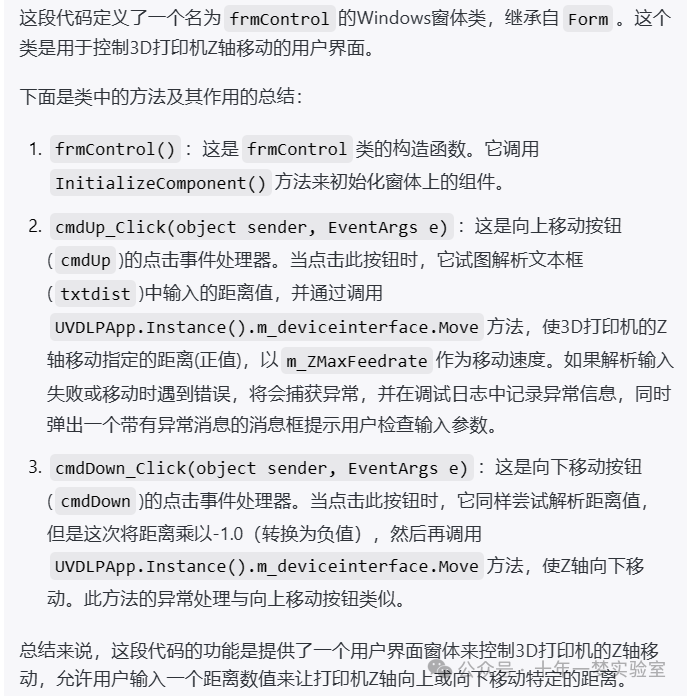
2. frmControl.cs
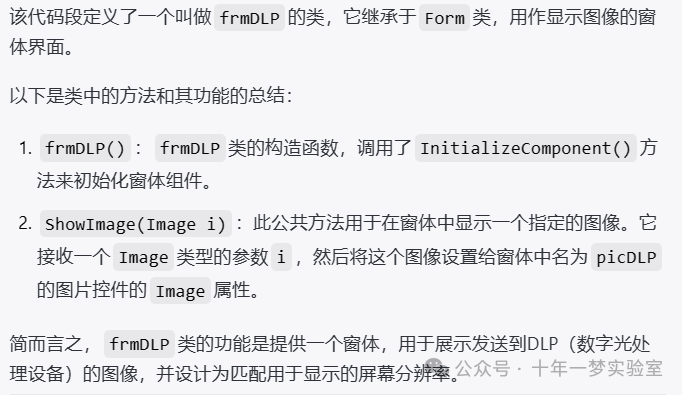
3. frmDLP.cs
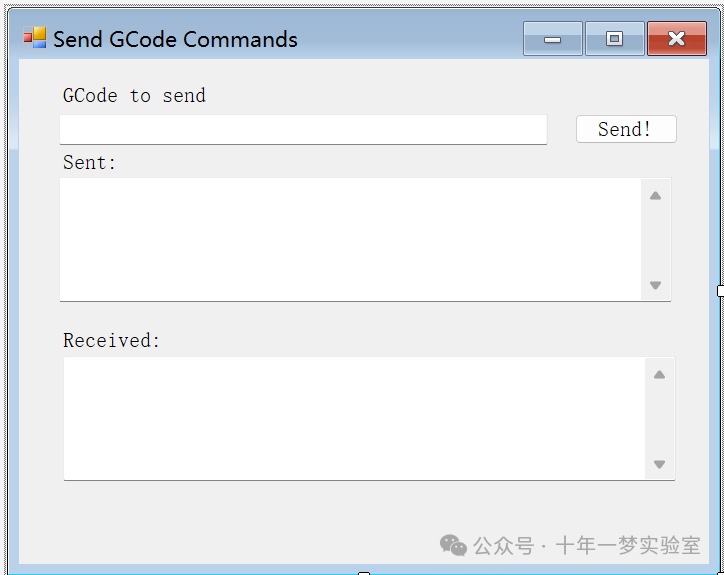
4. frmGCodeRaw.cs

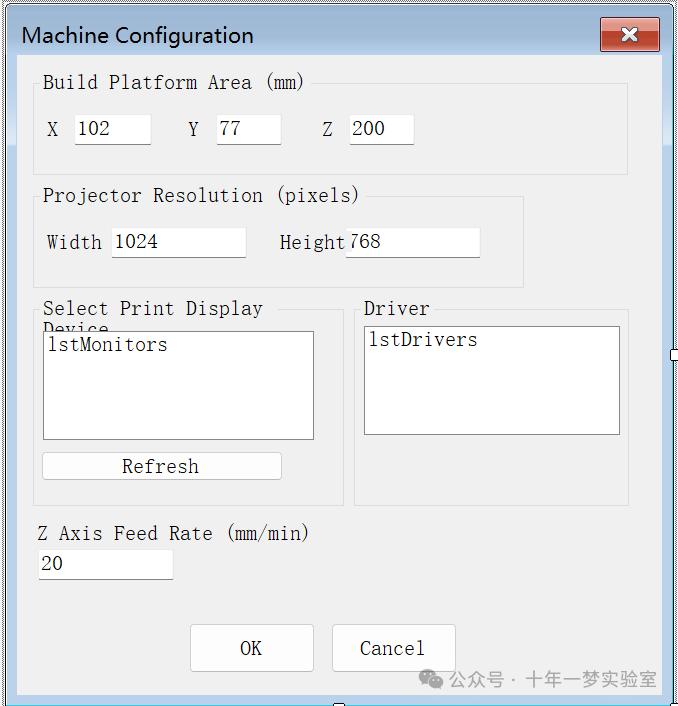
5. frmMachineConfig.cs
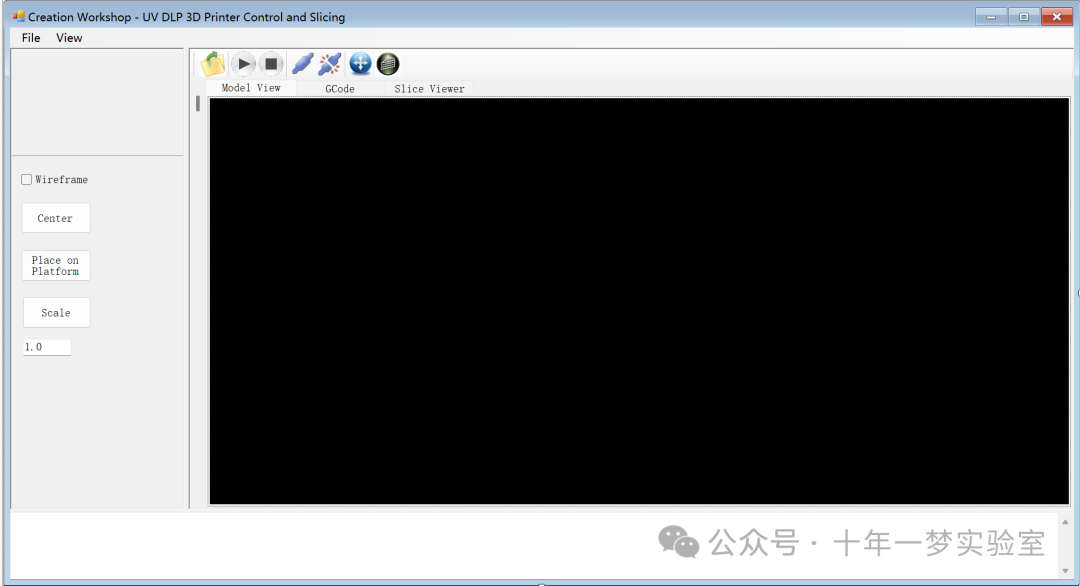
6. frmMain.cs
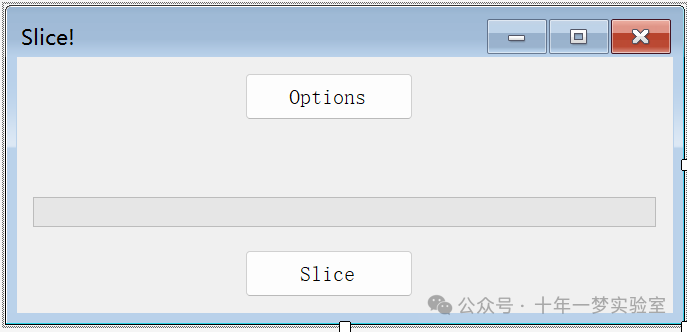
7. frmSlice.cs
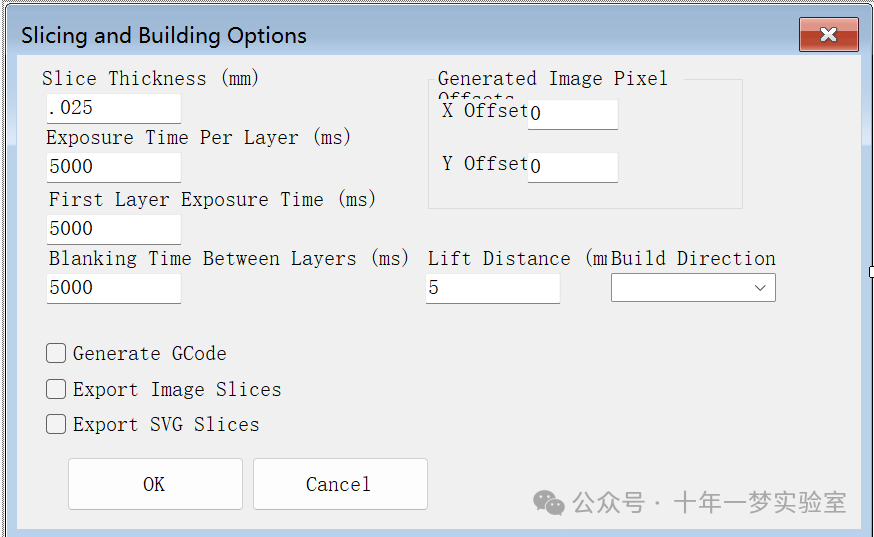
8. frmSliceOptions.cs
作者陈晓永:智能装备专业高级职称,软件工程师,机械设计中级职称,机器人与自动化产线仿真动画制作
The End














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









