






6. motion_deblur_filter.cpp通过Wiener滤波器恢复运动模糊图像(参数难调)
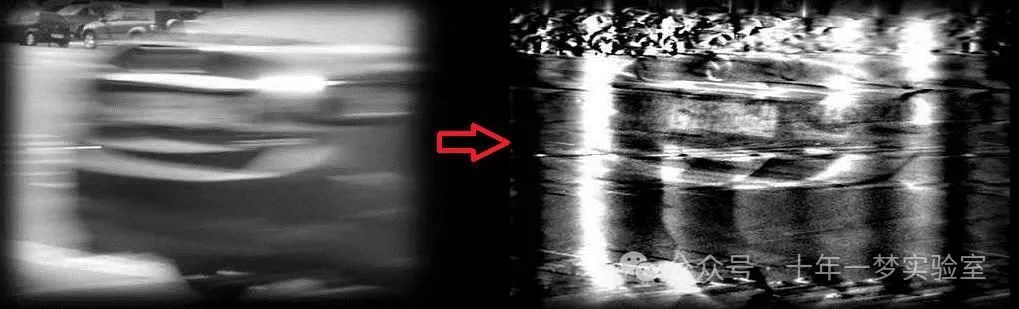
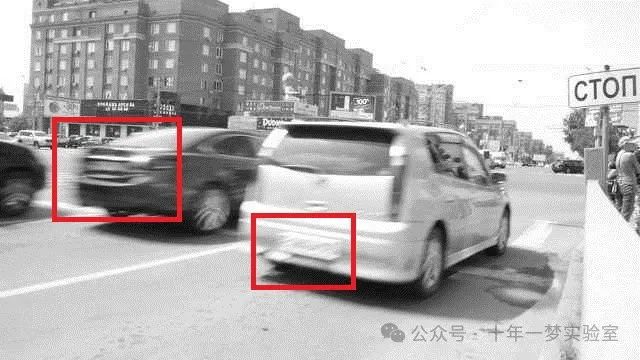
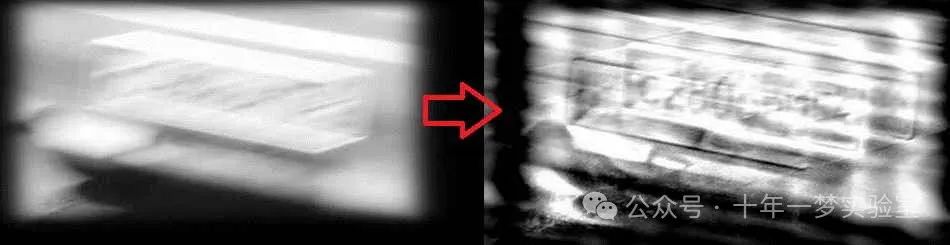
您将学习如何使用维纳滤波器恢复具有运动模糊失真的图像
/**
* @brief 学习如何使用Wiener滤波器恢复运动模糊失真的图像。
* @author 混沌鱼, karpushin@ngs.ru, https://github.com/VladKarpushin
*/
#include <iostream>
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
// 使用OpenCV和标准库的命名空间
using namespace cv;
using namespace std;
// 函数声明
void help();
void calcPSF(Mat& outputImg, Size filterSize, int len, double theta);
void fftshift(const Mat& inputImg, Mat& outputImg);
void filter2DFreq(const Mat& inputImg, Mat& outputImg, const Mat& H);
void calcWnrFilter(const Mat& input_h_PSF, Mat& output_G, double nsr);
void edgetaper(const Mat& inputImg, Mat& outputImg, double gamma = 5.0, double beta = 0.2);
// 定义程序可能接受的命令行参数。
const String keys =
"{help h usage ? | | print this message }"
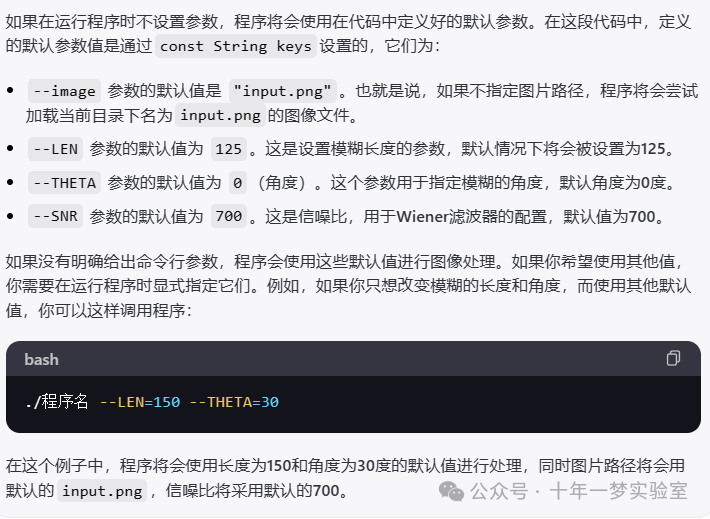
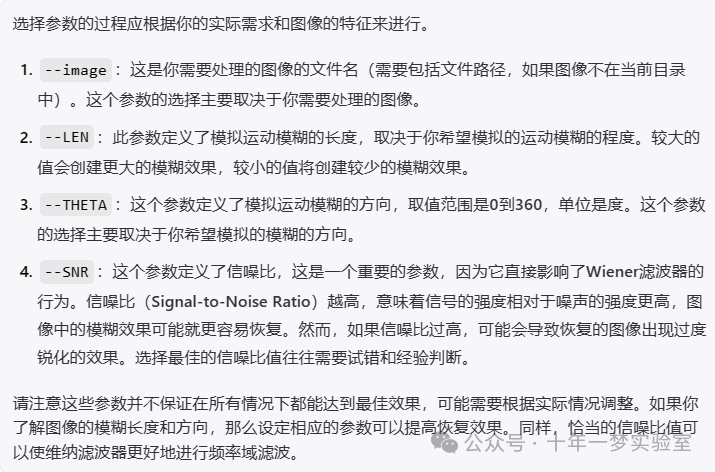
"{image |input.png | input image name }"
"{LEN |125 | length of a motion }"
"{THETA |0 | angle of a motion in degrees }"
"{SNR |700 | signal to noise ratio }"
;
// 主函数
int main(int argc, char *argv[])
{
// 显示帮助信息
help();
// 解析命令行参数
CommandLineParser parser(argc, argv, keys);
// 如果请求帮助,则打印帮助信息并退出程序。
if (parser.has("help"))
{
parser.printMessage();
return 0;
}
// 从命令行参数中获取LEN, THETA, SNR和图像文件名的值。
int LEN = parser.get<int>("LEN");
double THETA = parser.get<double>("THETA");
int snr = parser.get<int>("SNR");
string strInFileName = parser.get<String>("image");
// 检查解析的命令行参数是否有误。
if (!parser.check())
{
parser.printErrors();
return 0;
}
// 加载图像文件
Mat imgIn;
imgIn = imread(strInFileName, IMREAD_GRAYSCALE);
// 如果图像为空,则载入失败,打印错误信息并退出。
if (imgIn.empty())
{
cout << "ERROR : Image cannot be loaded..!!" << endl;
return -1;
}
// 图像处理后保存的输出图像。
Mat imgOut;
// 主要的图像处理过程开始
// 只处理偶数大小的图像
Rect roi = Rect(0, 0, imgIn.cols & -2, imgIn.rows & -2);
// 计算Hw(滤波器),过程开始
Mat Hw, h;
calcPSF(h, roi.size(), LEN, THETA);
calcWnrFilter(h, Hw, 1.0 / double(snr));
// 计算Hw(滤波器),过程结束
// 将图像转换为浮点型并进行边缘锥化处理。
imgIn.convertTo(imgIn, CV_32F);
edgetaper(imgIn, imgIn);
// 开始滤波处理
filter2DFreq(imgIn(roi), imgOut, Hw);
// 结束滤波处理
// 主要的图像处理过程结束
// 将处理后的图像转换回8位无符号整数型并进行归一化。
imgOut.convertTo(imgOut, CV_8U);
normalize(imgOut, imgOut, 0, 255, NORM_MINMAX);
// 将处理后的图像保存至文件。
imwrite("result.jpg", imgOut);
return 0;
}
// 显示帮助信息的函数实现。
void help()
{
cout << "2018-08-14" << endl;
cout << "Motion_deblur_v2" << endl;
cout << "You will learn how to recover an image with motion blur distortion using a Wiener filter" << endl;
}
// 计算点扩散函数(PSF)的函数实现。
void calcPSF(Mat& outputImg, Size filterSize, int len, double theta)
{
// 创建图像并用0填充。
Mat h(filterSize, CV_32F, Scalar(0));
// 获取滤波器的中心点。
Point point(filterSize.width / 2, filterSize.height / 2);
// 在图像中绘制椭圆(运动模糊PSF)。
ellipse(h, point, Size(0, cvRound(float(len) / 2.0)), 90.0 - theta, 0, 360, Scalar(255), FILLED);
// 对图像求和得到总和。
Scalar summa = sum(h);
// 将图像h除以总和summa[0]来规格化PSF。
outputImg = h / summa[0];
}
// 频率域上对信号进行中心化的函数实现。
void fftshift(const Mat& inputImg, Mat& outputImg)
{
// 克隆输入图像以获得与其大小相同的输出图像。
outputImg = inputImg.clone();
// 计算图像的中心点坐标。
int cx = outputImg.cols / 2;
int cy = outputImg.rows / 2;
// 划分图像为四块。
Mat q0(outputImg, Rect(0, 0, cx, cy));
Mat q1(outputImg, Rect(cx, 0, cx, cy));
Mat q2(outputImg, Rect(0, cy, cx, cy));
Mat q3(outputImg, Rect(cx, cy, cx, cy));
// 交换这四块图像,实现中心化。
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
}
// 在频率域上应用滤波器的函数实现。
void filter2DFreq(const Mat& inputImg, Mat& outputImg, const Mat& H)
{
// 创建两个平面的数组,其中一个为浮点型的输入图像,另一个为和输入图像同等大小的零矩阵。
Mat planes[2] = { Mat_<float>(inputImg.clone()), Mat::zeros(inputImg.size(), CV_32F) };
Mat complexI;
// 合并两个平面形成复数图像。
merge(planes, 2, complexI);
// 进行离散傅里叶变换。
dft(complexI, complexI, DFT_SCALE);
Mat planesH[2] = { Mat_<float>(H.clone()), Mat::zeros(H.size(), CV_32F) };
Mat complexH;
// 为H矩阵也创建复数形式。
merge(planesH, 2, complexH);
Mat complexIH;
// 对输入图像和滤波器进行逐个元素的复数乘法。
mulSpectrums(complexI, complexH, complexIH, 0);
// 进行离散傅里叶逆变换。
idft(complexIH, complexIH);
// 分离平面得到结果图像。
split(complexIH, planes);
outputImg = planes[0];
}
// 计算维纳滤波器的函数实现。
void calcWnrFilter(const Mat& input_h_PSF, Mat& output_G, double nsr)
{
Mat h_PSF_shifted;
// 对输入的PSF进行中心化。
fftshift(input_h_PSF, h_PSF_shifted);
// 为h_PSF_shifted创建两个平面,其中一个为浮点型形式的h_PSF_shifted,另一个为同等大小的零矩阵。
Mat planes[2] = { Mat_<float>(h_PSF_shifted.clone()), Mat::zeros(h_PSF_shifted.size(), CV_32F) };
Mat complexI;
// 合并两个平面形成复数图像。
merge(planes, 2, complexI);
// 进行离散傅里叶变换。
dft(complexI, complexI);
// 分离平面得到h_PSF的幅度。
split(complexI, planes);
Mat denom;
// 计算|h_PSF|的平方和加上噪声功率谱比(nsr)。
pow(abs(planes[0]), 2, denom);
denom += nsr;
// 对h_PSF除以denom得到Wiener滤波器。
divide(planes[0], denom, output_G);
}
// 对图像边缘执行锥形衰减的函数实现。
//! [edgetaper]
// 执行边缘渐变处理的功能,减少频谱泄露
void edgetaper(const Mat& inputImg, Mat& outputImg, double gamma, double beta)
{
// 获取输入图像的列数Nx和行数Ny
int Nx = inputImg.cols;
int Ny = inputImg.rows;
// 创建两个类型为浮点型的Mat矩阵w1和w2,w1的大小是1xNx,w2的大小是Nyx1
// 并使用无效的黑色标量像素初始化(初始化为0)
Mat w1(1, Nx, CV_32F, Scalar(0));
Mat w2(Ny, 1, CV_32F, Scalar(0));
// 获取w1和w2的指针,以便后面直接修改其值
float* p1 = w1.ptr<float>(0);
float* p2 = w2.ptr<float>(0);
// dx是x方向的间隔参数,初始化为对应于-π到π的步长
float dx = float(2.0 * CV_PI / Nx);
// 初始化x的初始值为-π
float x = float(-CV_PI);
// 计算每一列的权重,存入w1中
for (int i = 0; i < Nx; i++)
{
p1[i] = float(0.5 * (tanh((x + gamma / 2) / beta) - tanh((x - gamma / 2) / beta)));
x += dx;
}
// dy是y方向的间隔参数,初始化为对应于-π到π的步长
float dy = float(2.0 * CV_PI / Ny);
// 初始化y的初始值为-π
float y = float(-CV_PI);
// 计算每一行的权重,存入w2中
for (int i = 0; i < Ny; i++)
{
p2[i] = float(0.5 * (tanh((y + gamma / 2) / beta) - tanh((y - gamma / 2) / beta)));
y += dy;
}
// 创建矩阵w,它是w1和w2的外积,代表整个图像的每个像素的权重
Mat w = w2 * w1;
// 使用权重矩阵w对输入图像进行点乘,以便对图像进行边缘渐变处理,结果存入输出图像outputImg
multiply(inputImg, w, outputImg);
}
//! [edgetaper]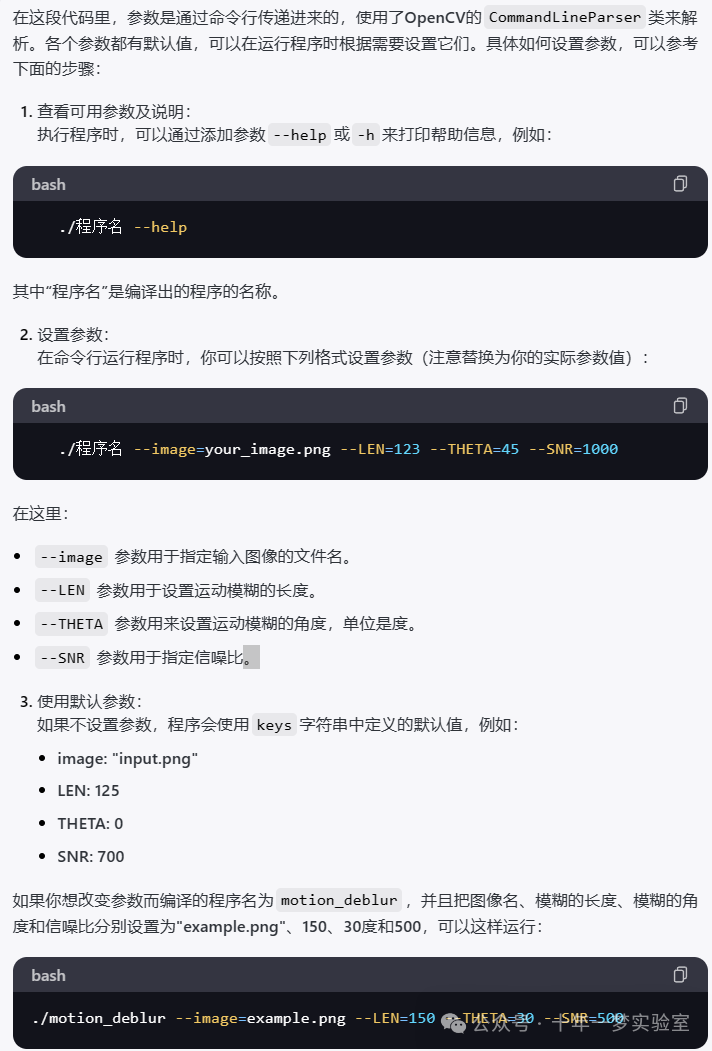














 1288
1288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









