






主题统计
目录
概述
如何计算统计数据
计算的统计类型
行为
与 ROS 1 的比较
支持
概述
ROS 2 提供了对任何订阅接收的消息进行统计测量的集成。允许用户收集订阅统计数据,使他们能够表征其系统的性能或帮助诊断任何存在的问题。
提供的测量值是接收到的消息年龄和接收到的消息周期。对于每个测量值,提供的统计数据是平均值、最大值、最小值、标准偏差和样本计数。这些统计数据是在移动窗口中计算的。
统计数据的计算方法
每个统计集都是通过使用 libstatistics_collector 包 https://github.com/ros-tooling/libstatistics_collector 中实现的实用程序在恒定时间和恒定内存中计算的。当订阅收到新消息时,这是当前测量窗口中计算的新样本。计算的平均值只是一个移动平均值 https://en.wikipedia.org/wiki/Moving_average 。最大值、最小值和样本计数在收到每个新样本时更新,而标准偏差是使用 Welford 的在线算法 https://en.wikipedia.org/wiki/Algorithms_for_calculating_variance#Welford's_online_algorithm 计算的。
计算的统计类型
收到消息周期
单位:毫秒
使用系统时钟测量接收消息之间的时间间隔
收到消息年龄
单位:毫秒
需要在头字段中填充时间戳的消息,以便计算从发布者发送的消息的年龄
行为
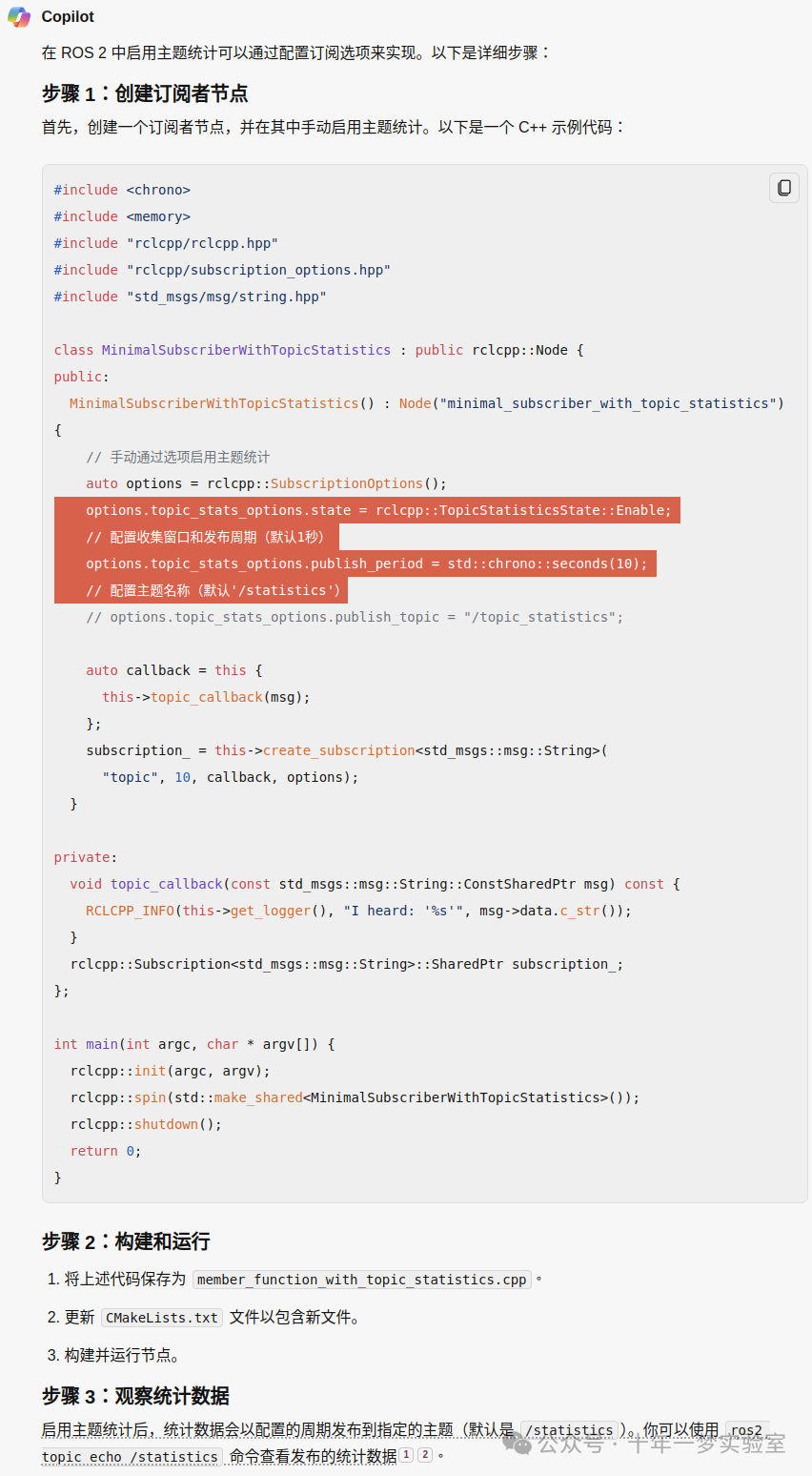
默认情况下,主题统计测量未启用。通过订阅配置选项为特定节点启用此功能后,将为该特定订阅启用接收消息年龄和接收消息周期测量。
数据以 statistics_msg/msg/MetricsMessage 的形式发布,发布周期可配置(默认 1 秒),发布到可配置的主题(默认 /statistics )。请注意,发布周期也用作样本收集窗口期。
由于接收到的消息周期需要在头字段中包含消息时间戳,因此发布了空数据。也就是说,如果没有找到时间戳,则所有统计值都是 NaN。发布 NaN 值而不是完全不发布可以避免信号缺失问题,并且旨在明确显示无法进行测量。
每个窗口的第一个样本在接收消息周期统计中不会产生测量值。这是因为计算此统计数据需要知道上一条消息到达的时间,因此窗口中的后续样本会产生测量值。
与 ROS 1 的比较
类似于 ROS 1 主题统计 https://wiki.ros.org/Topics#Topic_statistics ,消息年龄和消息周期都被计算出来,尽管是从订阅方计算的。其他 ROS 1 指标,例如丢失消息的数量或流量,目前尚未提供。
支持
此功能目前仅在 ROS 2 Foxy 中支持 C++ (rclcpp)。未来的工作和改进,例如对 Python 的支持,可以在此找到。https://github.com/ros2/ros2/issues/917















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









