






 本文详细描述了如何使用Simulink和AMESIM进行乘用车制动轮缸的精确建模,通过对比仿真结果验证模型的准确性,特别强调了底层基础研究的重要性。作者提供了详细的步骤和模型验证结果,适用于学习和理解制动系统的工作原理。
本文详细描述了如何使用Simulink和AMESIM进行乘用车制动轮缸的精确建模,通过对比仿真结果验证模型的准确性,特别强调了底层基础研究的重要性。作者提供了详细的步骤和模型验证结果,适用于学习和理解制动系统的工作原理。
乘用车制动轮缸建模,simulink模型,以及amesim模型,simulink和amesim联合仿真模型及验证,不是相关文献上对制动轮缸进行简化的公式模型,而是较为精细化的建模,非常详细的公式建模,制动轮缸的物理结构可看作由弹簧阻尼组成的单活塞腔模型。
将活塞和输出推杆质量等效到活塞上。
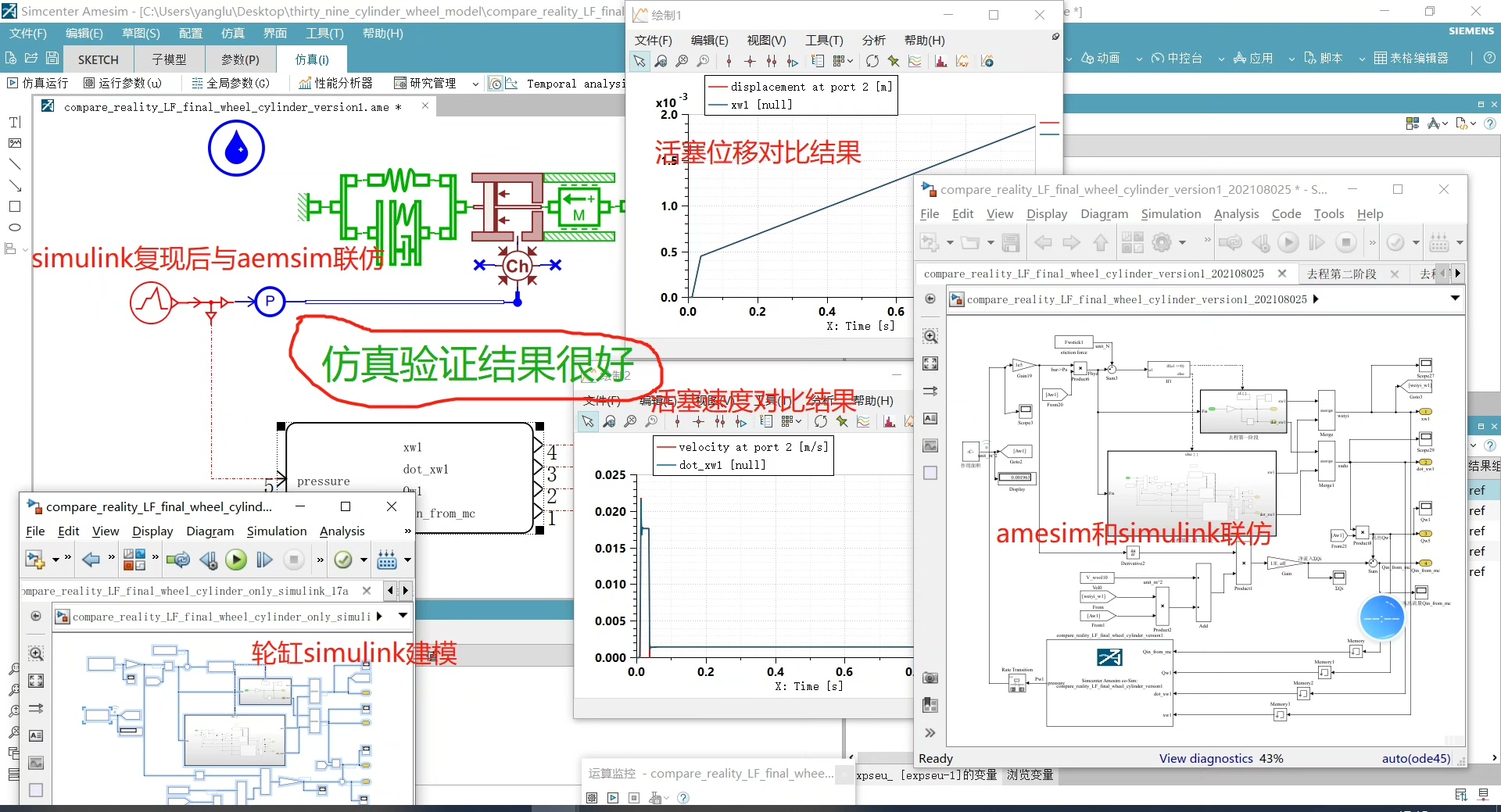
目前网络上对于制动系统这一块最基础的内容较少,几乎没有,都想着做上层,忽略对底层的研究,我在对amesim制动系统进行研究的过程中,查阅了大量amesim建模的资料,对每一个模型进行了英文文档分析,以及查看了amesim某些公式对应的源C代码,amesim每个模块都是根据公式搭建起来的,我是先对amesim进行了研究,然后在simulink中将amesim模块对应公式进行复现,然后将simulink结果和amesim模型结果进行仿真对比,验证了simulink模型所搭建的模型的准确性,并且录制了视频展示相关模型结果,以及写了对应的说明文档,非常细致,大概10页纸,有对应参数的说明,取值,仿真具体结果,很详细,小白也能学会。
注意:验模展示仅以左前轮为例进行展示,其余与此同理。
设计工况:(1)乘用车前后轴轮缸直径稍有差异,但一般前轴轮缸直径要大于后轴轮缸直径。
按照以上所列参数对左前轮缸模型进行仿真,设置固定步长为1e-4s。
在0~1s内给0~180bar的斜坡压力输入信号。
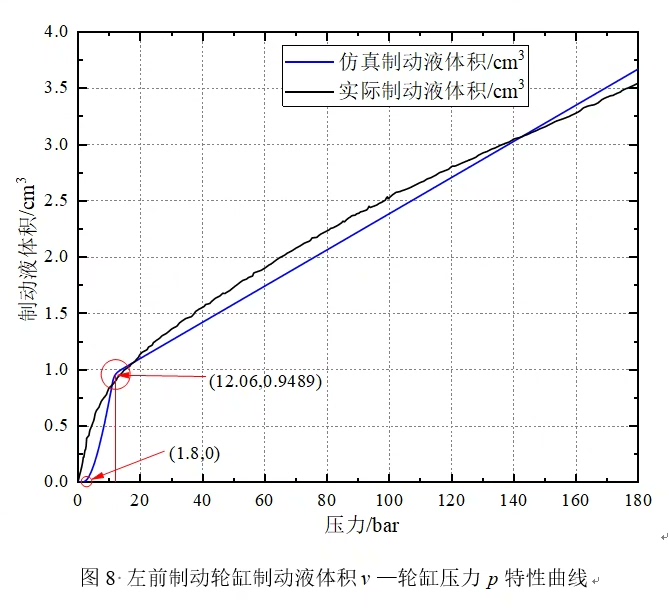
(2)同时将实际的P-V特性曲线作出,与仿真结果相对比。
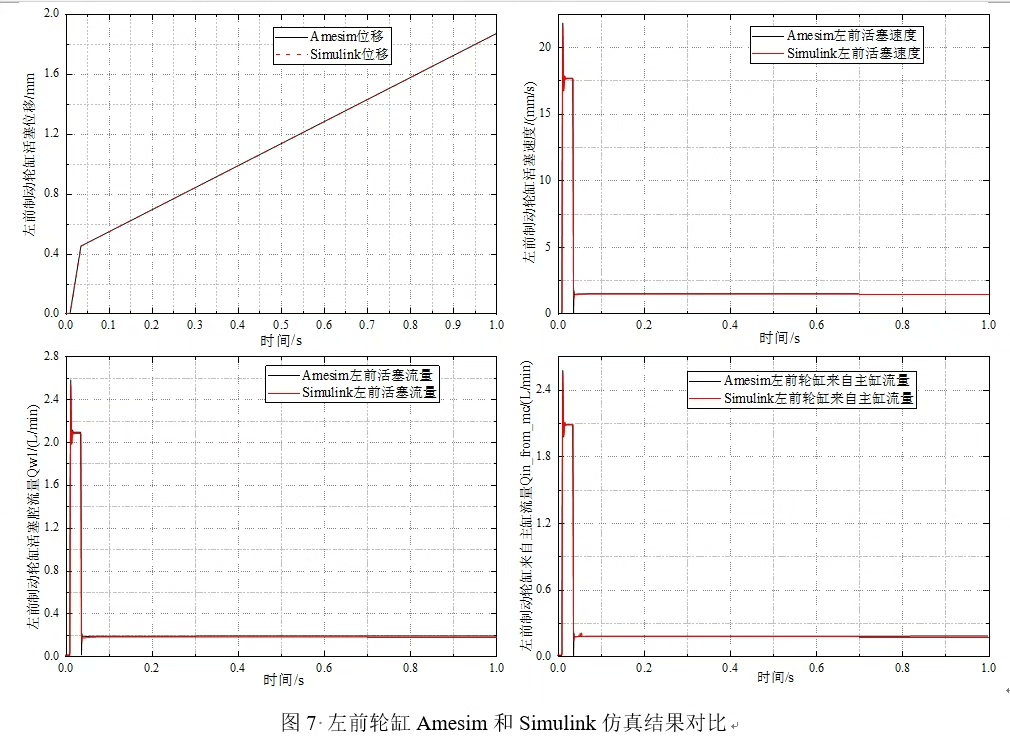
控制效果:(1)Amesim和Simulink仿真曲线基本上完全重合,故建立的Simulink模型动力学模型有效,可参见下列各图展示。
可以方便的在Amesim中观察仿真曲线结果,使得其与实际曲线结果相适应。
(2)再通过比较仿真制动液体积和实际制动液体积随压力变化关系可知,仿真曲线大致跟随上实际曲线。
不能完全重合的原因主要在于仿真的模型对组成轮缸的实际部件作了简化,活塞缸支架在压缩过程中的形变所产生的反作用力,不同作用力之间的过度等对p-v特性影响较小的因素均未考虑,可参见下图展示。
Matlab/Simulink版本:2017a
Amesim版本:Amesim16(暂不知道高版本是否能打开低版本)
有完整的仿真演示运行视频,并提供参考资料,不用担心学不会本模型仅供学习使用,不牵涉到实车。
ID:8199729097528227
倒着走的三三


乘用车制动轮缸建模是制动系统设计中的重要环节。在设计过程中,制动轮缸模型的精确性对系统性能和安全性起着至关重要的作用。本文将介绍使用Simulink和Amesim软件联合建模和验证制动轮缸模型的方法。
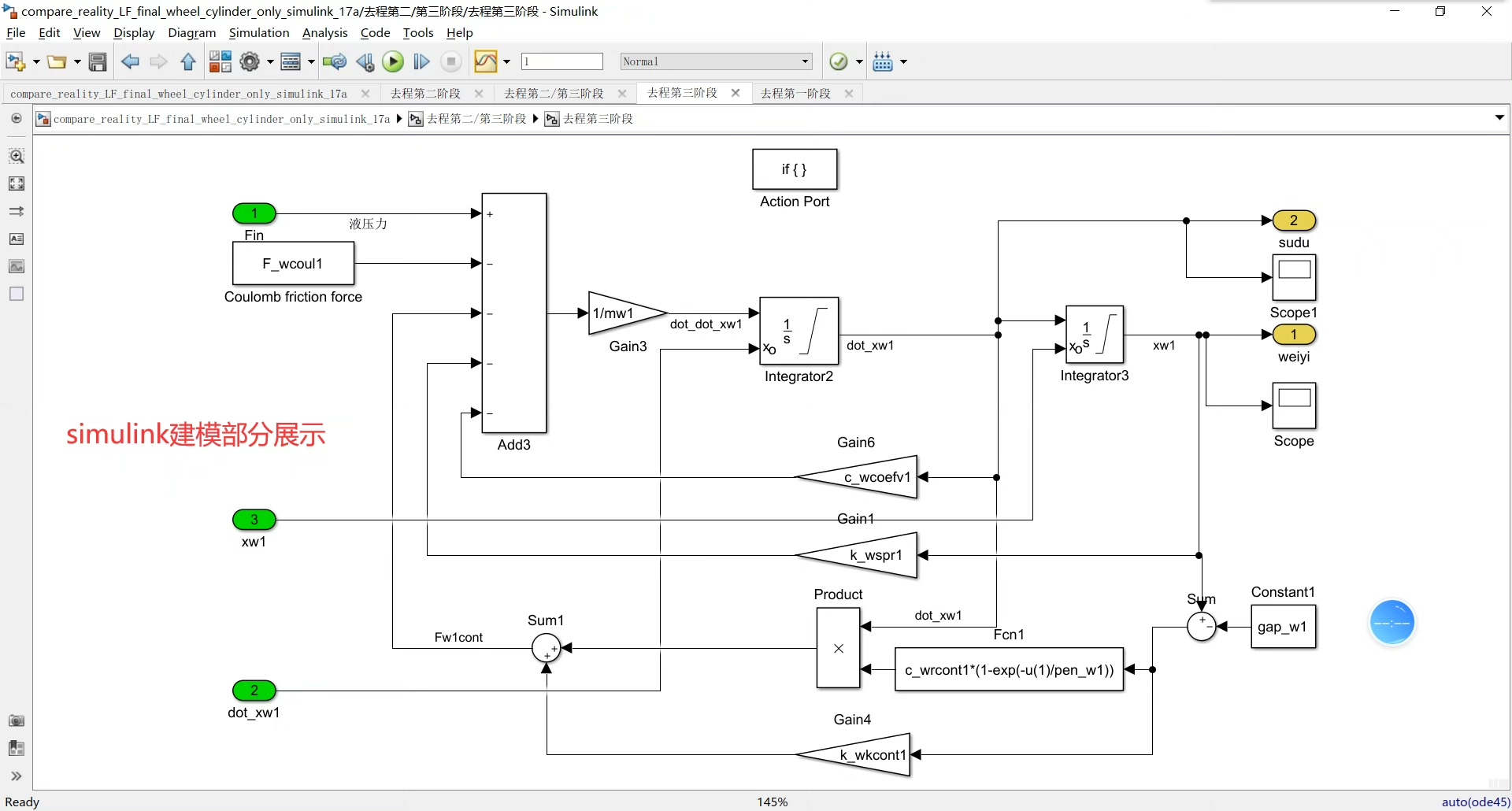
首先,乘用车制动轮缸的物理结构可以看作是由弹簧阻尼组成的单活塞腔模型。为了更精确地描述制动轮缸的行为,我们将活塞和输出推杆的质量等效到活塞上。这样可以更真实地模拟制动轮缸在压力变化下的运动行为。
目前网络上关于制动系统的基础内容较少,大多数人都关注于上层的应用,而忽略了对底层的研究。在对Amesim制动系统进行研究的过程中,我查阅了大量的Amesim建模资料,并对每个模型进行了英文文档分析。此外,我还查看了一些Amesim公式对应的源C代码。Amesim的每个模块都是根据公式搭建起来的,因此我先对Amesim进行了研究,然后在Simulink中复现了Amesim模块的公式。最后,将Simulink模型的结果与Amesim模型进行了仿真对比,验证了Simulink模型的准确性。
为了更直观地展示模型结果,我录制了相关模型的仿真演示视频,并编写了详细的说明文档。说明文档共有大约10页纸,其中包括了参数的说明、取值以及仿真的具体结果。文档非常细致,即使对于初学者也能很好地理解。
需要注意的是,本文中的仿真展示仅以左前轮为例进行展示,其他轮缸的仿真过程与之类似。在设计工况上,乘用车前后轴轮缸直径稍有差异,一般前轴轮缸直径要大于后轴轮缸直径。根据以上参数,对左前轮缸模型进行了仿真,并设置固定步长为1e-4s。在01s内施加了0180bar的斜坡压力输入信号。
对于控制效果的评估,在Simulink和Amesim中进行的仿真曲线基本上完全重合,说明所建立的Simulink模型是有效的。同时,通过比较仿真制动液体积和实际制动液体积随压力变化的关系,可以发现仿真曲线大致跟随实际曲线的变化。然而,由于仿真模型对组成轮缸的实际部件进行了简化,并未考虑活塞缸支架在压缩过程中的形变和不同作用力之间的过渡等因素,所以无法完全重合。这一点可通过下图展示。
本文使用的Matlab Simulink版本为2017a,Amesim版本为Amesim16。同时,我还提供了完整的仿真演示运行视频和参考资料,以帮助读者更好地理解模型。需要注意的是,本模型仅供学习使用,不涉及实际车辆。
通过Simulink和Amesim联合建模和验证制动轮缸模型的方法,我们可以更全面、准确地分析制动系统的性能。这种方法不仅能够帮助我们更好地理解制动轮缸的行为,还为制动系统的设计和优化提供了重要的参考依据。希望本文对读者在制动系统的研究和应用中有所帮助。
以上相关代码,程序地址:http://wekup.cn/729097528227.html















 8899
8899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









