







 本文详细介绍了如何在ROS中创建并编译自定义msg包,包括创建工作空间、新建msg文件、编辑CMakeLists.txt和package.xml文件,以及最终编译和查看生成的头文件。
本文详细介绍了如何在ROS中创建并编译自定义msg包,包括创建工作空间、新建msg文件、编辑CMakeLists.txt和package.xml文件,以及最终编译和查看生成的头文件。
ROS中编译自定义msg包,生成头文件
1、创建工作空间
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace
2、创建自定义msg的功能包
catkin_create_pkg test_msgs
cd test_msgs/
mkdir msg
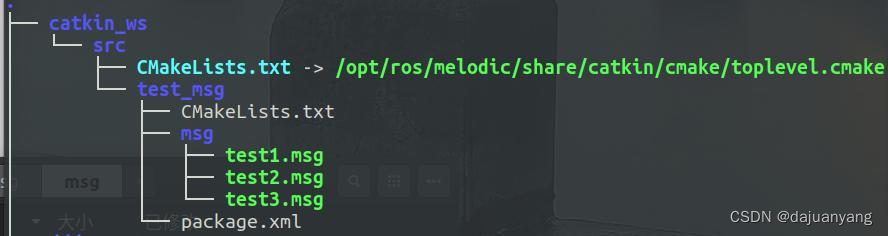
3、新建自定义msg文件
在test_msg/msg/路径下新建自定义的msg文件,文件目录如下图。
4、编辑test_msg路径下的"CMakeLists.txt"文件
主要有以下几项:
cmake_minimum_required(VERSION 3.0.2)
project(test_msg)
#1 Find catkin macros and libraries
find_package(catkin REQUIRED COMPONENTS roscpp rosmsg rospy message_generation std_msgs geometry_msgs)
#2 Generate messages in the 'msg' folder
add_message_files(
FILES
test1.msg
test2.msg
test3.msg
)
#3 Generate added messages and services with  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 560
560











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









