






优雅创建
创建msg包命令
ros2 pkg create --build-type ament_cmake tutorial_interfaces
tutorial_interfaces是新包的名称。注意,它是一个CMake包,目前还没有办法在纯Python包中生成.msg、.srv和.action文件。但是,可以在CMake包中创建自定义接口,然后在Python节点中使用它。
其中ros2 msg必须在msg文件下,且第一个字母必须大写。
典型例子:
修改自定义的service_demo.msg文件名为ServiceDemo.msg同时修改CMakeLists.txt中对应文件名
rosidl_generate_interfaces(${PROJECT_NAME} “msg/ServiceDemo.msg”)
ServiceDemo.msg最终生成头文件名为service_demo.hpp。在应用程序中包含此头文件
#include <service_demo/msg/service_demo.hpp>
查看验证
ros2 interface show tutorial_interfaces/msg/ServiceDemo
其他包需要添加
-
CMakeLists.txt
#…
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGE
#…
-
package.xml
<depend>tutorial_interfaces</depend>
原始数据类型

每种内置类型都可以用来定义数组:
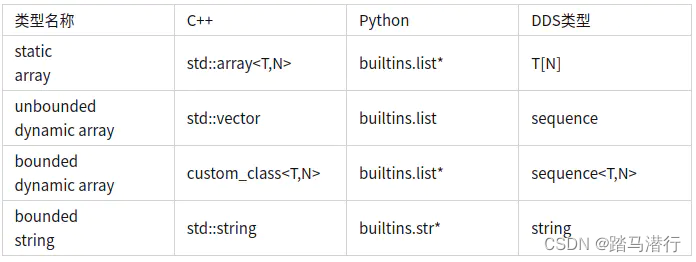
所有比其ROS定义更宽松的类型均由软件强制执行ROS的范围和长度约束。
示例:
int32[] unbounded_integer_array
int32[5] five_integers_array
int32[<=5] up_to_five_integers_array
string string_of_unbounded_size
string<=10 up_to_ten_characters_string
string[<=5] up_to_five_unbounded_strings
string<=10[] unbounded_array_of_string_up_to_ten_characters each
string<=10[<=5] up_to_five_strings_up_to_ten_characters_each















 900
900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











