






工控小知识:
YAMAHA机器人跟上位机TCP通讯
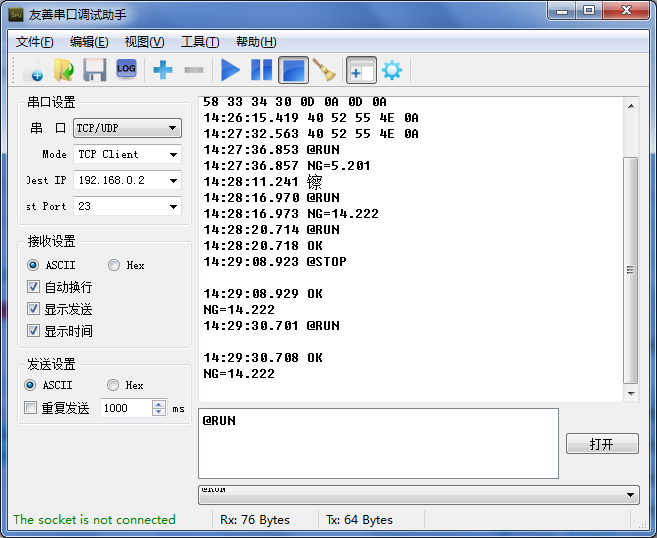
机器人当断电后重启后是不会自动执行程序的,这时候的机器人相当于是伺服端,在等待外部客户端给命令,需要上位机发一个@RUN+回车空格的指令,机器人返回OK(如果返回NG就说明有错误),这时候机器人控制器上界面会循环转圈,就表示程序已运行,如果这时候需要监控机器人程序,就得用其他232/485通讯监控,刚开始调试的时候可以用网络助手测试
工控小知识:
YAMAHA机器人跟上位机TCP通讯
机器人当断电后重启后是不会自动执行程序的,这时候的机器人相当于是伺服端,在等待外部客户端给命令,需要上位机发一个@RUN+回车空格的指令,机器人返回OK(如果返回NG就说明有错误),这时候机器人控制器上界面会循环转圈,就表示程序已运行,如果这时候需要监控机器人程序,就得用其他232/485通讯监控,刚开始调试的时候可以用网络助手测试
 891
694
891
694











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























