







 本文介绍了如何在Simulink中使用内置PID控制器进行建模和仿真。通过构建包含PID控制器的反馈控制系统,作者展示了PID参数(P,I,D)对控制效果的影响,并提供了调整参数以优化控制响应的示例。
本文介绍了如何在Simulink中使用内置PID控制器进行建模和仿真。通过构建包含PID控制器的反馈控制系统,作者展示了PID参数(P,I,D)对控制效果的影响,并提供了调整参数以优化控制响应的示例。
小编最近在建模时涉及到了PID控制,于是学习着使用simulink中的PID控制器(PID controller),为了加深理解,在simulink中根据PID控制算法做了一个PID控制器,对比simulink自带PID控制器,两者控制效果一样,小编这里就将simulink自带PID控制器和自制PID控制器分享给大家。
1、simulink自带PID控制器
首先介绍一下下图中PID控制逻辑。下图中Simulink的建模采用固定步长运行,且每个步长为0.001(仿真配置图如下)。
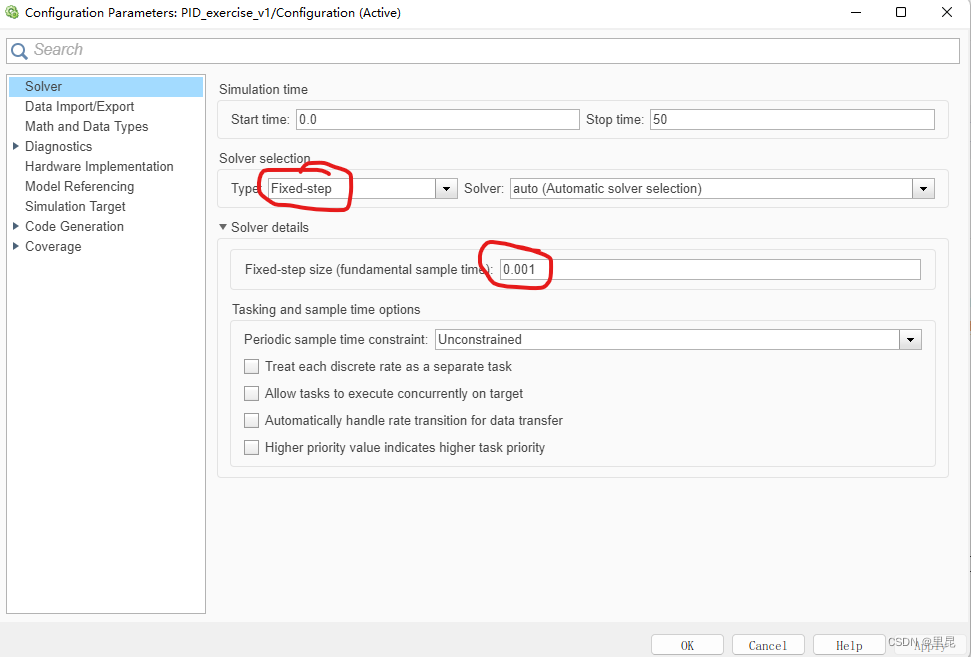
配置好仿真参数,在simulink的建模空间里搭建下图的模型。下图是一个控制目标值是常数1(constant=1),因为PID是反馈控制,所以采用了一个作差运算(minus),将控制后的信号与目标信号作差;被控对象采用传递函数(trans-fcn)实现,这里以一个二次函数举例(1/(s2+5s+0.1));被控对象后是对被控对象输出结果采用的PID控制器(PID controller);最后可以改变PID参数看一下控制结果:

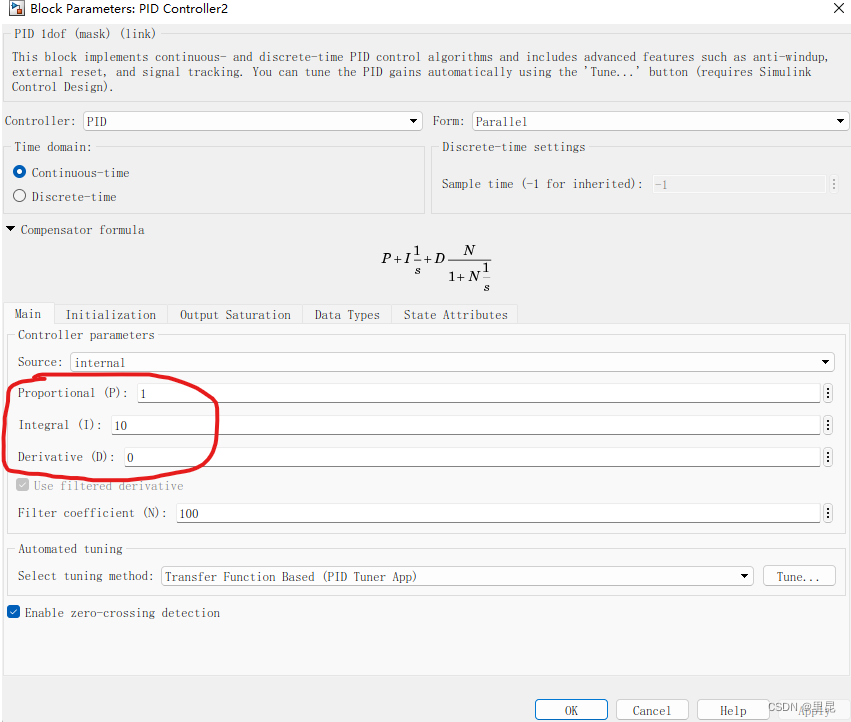
PID参数设置面板如下图,下图中P=1、I=10、D=0,所以下图中实际是一个PI控制器,因为D参数等于零:
结果如下图:
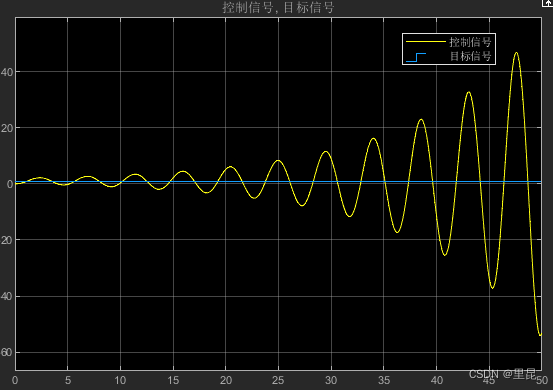
可以看到PID参数调整并不好,控制值与目标值越来越远了。因此PID参数设置如下:P=1、I=0.2、D=0;得到的结果如下:
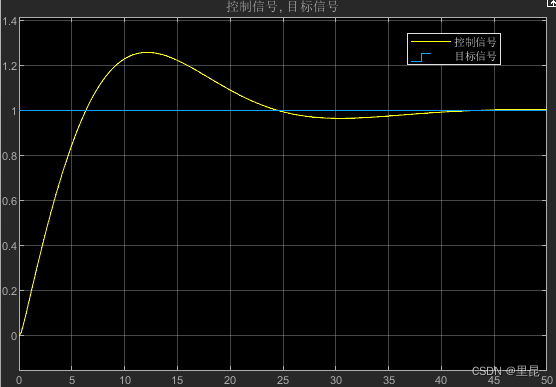
可以看到使用simulink自带的PID控制器,通过调整PID控制参数P、I、D可以使控制值最终达到目标值,实现PID控制效果。
后面一期我们将从PID控制算法出发,搭建PID控制器模型,来加深我们对PID控制算法的理解。

















 185
185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









