







一、简介
顾名思义,这个算法是通过对点云进行随机抽样的方式来获取原始点云的子集,随机采样的方式有很多种,其中PCL中所采用的方式如下所示:
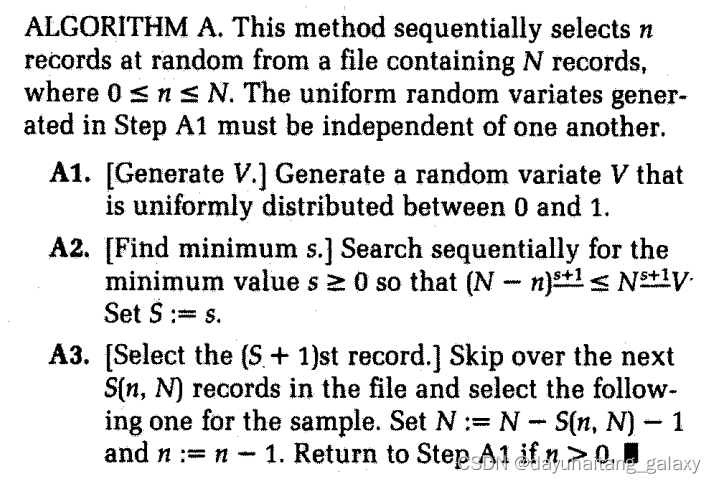
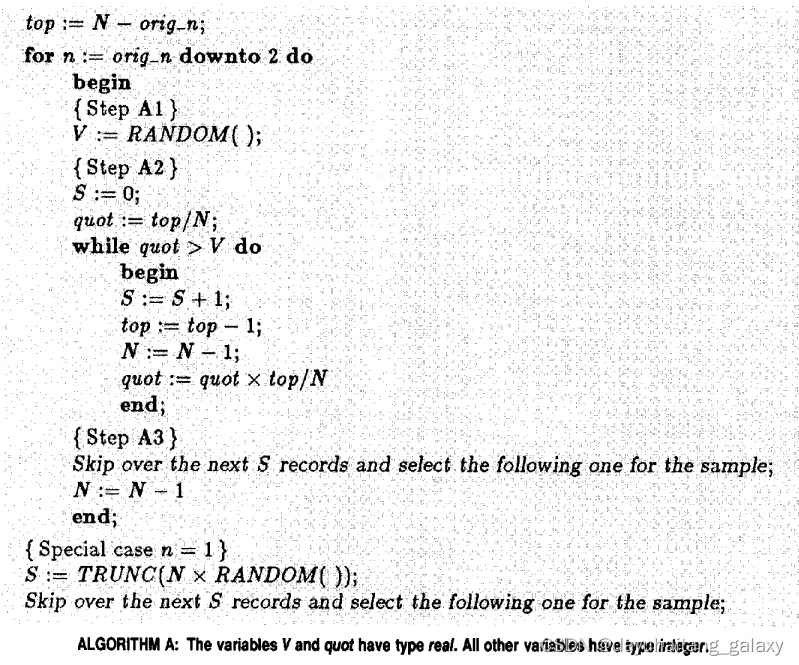
该算法时间复杂度为O(N),并且结果为排序的索引数据。
二、实现代码
相关配置可以参考文章https://blog.csdn.net/dayuhaitang1/article/details/124503487中的非插件基础配置,核心代码如下所示:
void MainWindow::RandomSampling(顾名思义,这个算法是通过对点云进行随机抽样的方式来获取原始点云的子集,随机采样的方式有很多种,其中PCL中所采用的方式如下所示:
该算法时间复杂度为O(N),并且结果为排序的索引数据。
相关配置可以参考文章https://blog.csdn.net/dayuhaitang1/article/details/124503487中的非插件基础配置,核心代码如下所示:
void MainWindow::RandomSampling(










 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1万+
1万+







