







霍夫变换用来从图像中检测出具有某种特征的几何形状,如直线、圆、椭圆等。霍夫线变换的思想是:霍夫线变换必须应用在二值图像上,它认为图像上每一个点都有可能是某条直线上的一个点,对过每点的所有直线进行投票,根据设定的权重做最终的判断,这个是霍夫线变换的理论基础。
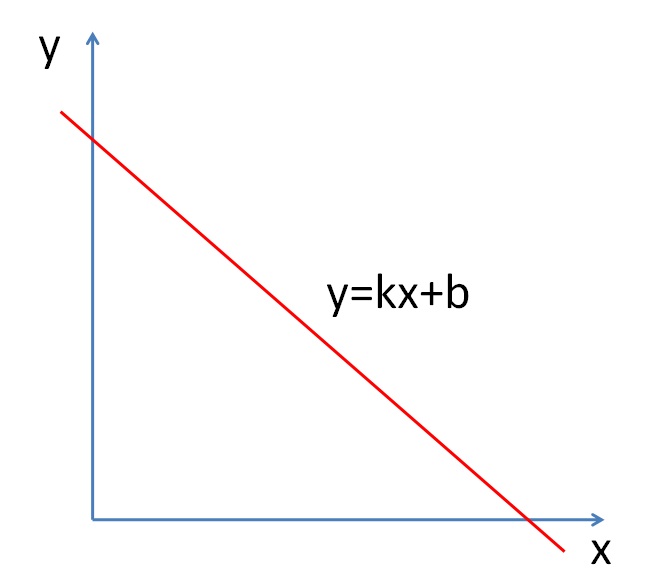
1. 对于xy坐标平面的一个点(x0,y0),经过该点的一条直线用 y0=k*x0+b来表示,k是斜率,b是直线的截距,即x0=0时,y0对应的值:
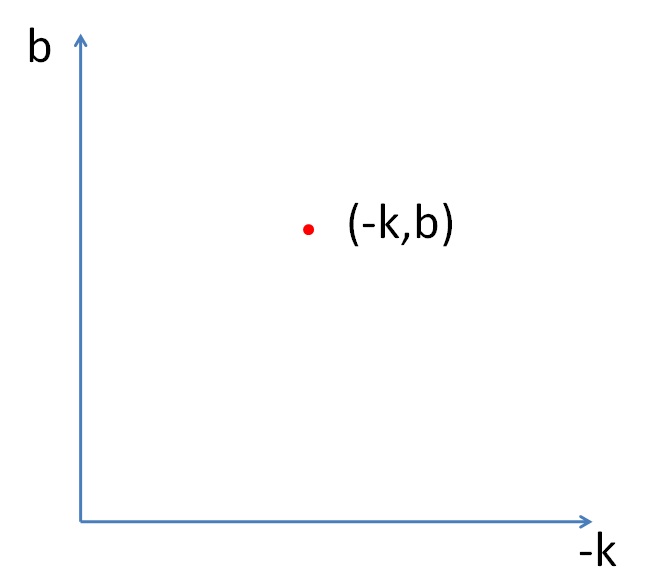
2. 上式也可以用b=y0-k*x0来表述,即在b k坐标平面,直线可以用一个点(-k,b)来表示:
3. 推而广之,经过xy平面上一个点(x0,y0)的所有直线在b k坐标平面就形成了一条曲线:
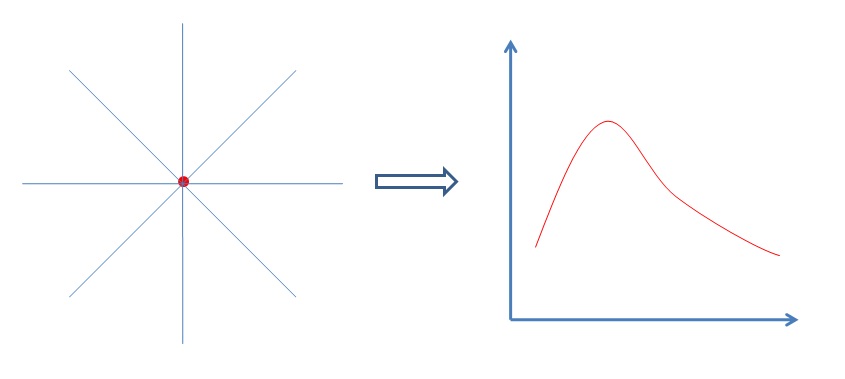
4. xy平面上一条由n个像素点组成的直线上所有点的所有直线在b k平面形成了n条曲线,并且n条曲线交于一点,该点坐标反推到xy平面即是那条n个像素点所组成的直线:

如此一来,在b k平面上,若曲线相交与点(b0,k0),则该点的权重加1,最后统计b k平面所有点的权重,大于一定阈值的点,即代表x y平面上具有该点所对应的直线。
在实际应用在,所谓的b k平面其实就是极坐标平面,公式为:
ρ=x*cosθ+y*sinθ
从下边这幅图像中查找直线,直观印象就是水和山之间的分界线检测出直线的可能性比较大:

使用Opencv中HoughLines检测霍夫直线:
#include "core/core.hpp"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
using namespace cv;
int main(int argc,char *argv[])
{
Mat image=imread(argv[1]);
Mat imageGray;
cvtColor(image,imageGray,CV_RGB2GRAY);
GaussianBlur(imageGray,imageGray,Size(3,3),1); //滤波
threshold(imageGray,imageGray,100,255,CV_THRESH_OTSU); //大津阈值
imshow("OTSU",imageGray);
Canny(imageGray,imageGray,100,230); //Canny边缘检测
imshow("Canny",imageGray);
vector<Vec2f>lines;
HoughLines(imageGray,lines,1,CV_PI/180,250); //霍夫直线变换
for(int i=0;i<lines.size();i++) //画出直线
{
float rho=lines[i][0];
float theta=lines[i][1];
Point pt1,pt2;
double a=cos(theta),b=sin(theta);
double x0=a*rho,y0=b*rho;
pt1.x=cvRound(x0+1000*(-b));
pt1.y=cvRound(y0+1000*a);
pt2.x=cvRound(x0-1000*(-b));
pt2.y=cvRound(y0-1000*a);
line(image,pt1,pt2,Scalar(0,0,255),2);
}
imshow("直线",image);
waitKey();
return 0;
}
图像转化成灰度图像之后先进行一个大津阈值分割:

之后用Canny检测边缘:
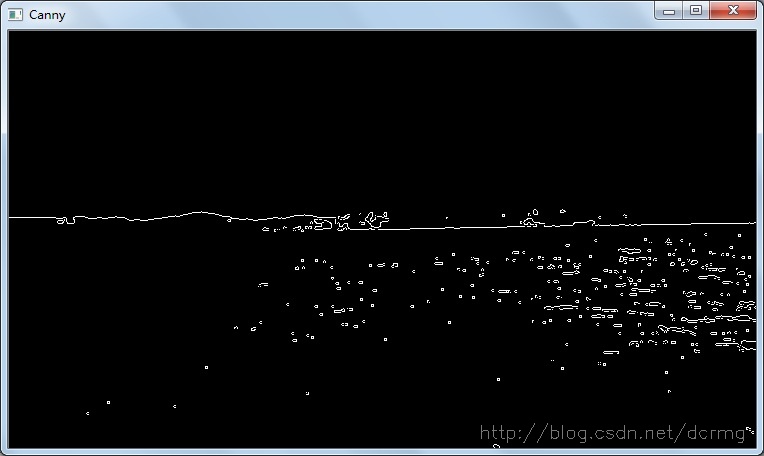
在Canny图像的基础上,检测直线段,并输出到原始图像上:

HoughLines函数第5个参数“threshold”代表的就是对累计平面上的点是否是直线的阈值判断,在笛卡尔坐标系中其实就是连续直线段的像素数,直观的理解就是直线段的长度。















 3142
3142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









