






FreeRTOS是一款开源的实时操作系统内核,专为嵌入式系统设计。它提供了任务管理、调度、信号量、消息队列等功能,可以帮助开发人员在嵌入式系统中实现多任务处理和实时性要求。
1.创建任务
创建任务使用FreeRTOS的API函数xTaskCreate()。这可能是所有API函数中最 复杂的函数,但不幸的是这也是我们第一个遇到的API函数。但我们必须首先掌控任务, 因为它们是多任务系统中最基本的组件。本书中的所有示例程序都会用到 xTaskCreate(),所以会有大量的例子可以参考。
xTaskCreate( pvTaskCode, pcName, usStackDepth, pvParameters, uxPriority, pxCreatedTask )
(1)任务优先级
xTaskCreate() API 函数的参数 uxPriority 为创建的任务赋予了一个初始优先级。这个侁先级可以在调度器启动后调用vTaskPrioritySet() API函数进行修改。应用程序在文件FreeRTOSConfig.h 中设定的编译时配置常量 configMAX_PRIORITIES的值,即是最多可具有的优先级数目。FreeRTOS 本身并没 有限定这个常量的最大值,但这个值越大,则内核花销的内存空间就越多。所以总是建 议将此常量设为能够用到的最小值。
(2)阻塞状态
如果一个任务正在等待某个事件,则称这个任务处于”阻塞态(blocked)”。阻塞态是非运行态的一个子状态。
任务可以进入阻塞态以等待以下两种不同类型的事件: 1. 定时(时间相关)事件——这类事件可以是延迟到期或是绝对时间到点。比如 说某个任务可以进入阻塞态以延迟10ms。 2. 同步事件——源于其它任务或中断的事件。比如说,某个任务可以进入阻塞 态以等待队列中有数据到来。同步事件囊括了所有板级范围内的事件类型。FreeRTOS 的队列,二值信号量,计数信号量,互斥信号量(recursive semaphore, 递归信号量,本文一律称为互斥信号量,因为其主要用于实现互斥访问)和互斥量都可以用来实现同步事件。
任务可以在进入阻塞态以等待同步事件时指定一个等待超时时间,这样可以有效地实现阻塞状态下同时等待两种类型的事件。比如说,某个任务可以等待队列中有数据到来,但最多只等10ms。如果10ms内有数据到来,或是10ms过去了还没有数据到来,这两种情况下该任务都将退出阻塞态。
(3)挂起状态
“挂起(suspended)”也是非运行状态的子状态。处于挂起状态的任务对调度器而言是不可见的。让一个任务进入挂起状态的唯一办法就是调用vTaskSuspend() API函数;而把一个挂起状态的任务唤醒的唯一途径就是调用vTaskResume()或 vTaskResumeFromISR() API函数。大多数应用程序中都不会用到挂起状态。
(4)就绪状态
如果任务处于非运行状态,但既没有阻塞也没有挂起,则这个任务处于就绪(ready,准备或就绪)状态。处于就绪态的任务能够被运行,但只是”准备(ready)”运行,而当前 尚未运行。
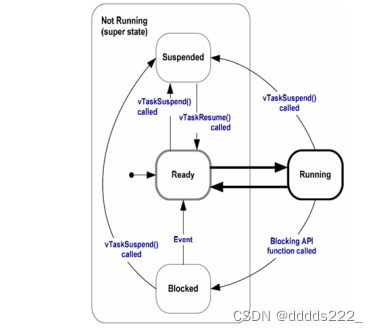
(5)完整的状态转移图
对之前那个过于简单的状态图进行了扩充,包含了本节描述的非运行状态的子状态。目前为止所有用到的示例程序中创建的任务都还没有用到阻塞状态和挂起状态,仅仅是在就绪状态和运行状态之间转移
(6)利用阻塞态实现延迟
void vTaskDelay( const TickType_t xTicksToDelay ) PRIVILEGED_FUNCTION;
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement ) PRIVILEGED_FUNCTION;
(7)空闲任务与空闲任务钩子函数
但处理器总是需要代码来执行——所以至少要有一个任务处于运行态。为了保证这一点,当调用vTaskStartScheduler()时,调度器会自动创建一个空闲任务。空闲任务是一个非常短小的循环——和最早的示例任务十分相似,总是可以运行。
空闲任务拥有最低优先级(优先级 0)以保证其不会妨碍具有更高优先级的应用任务进入运行态——当然,没有任何限制说是不能把应用任务创建在与空闲任务相同的优先级上;如果需要的话,你一样可以和空闲任务一起共享优先级。
(8)空闲任务钩子函数
通过空闲任务钩子函数(或称回调,hook, or call-back),可以直接在空闲任务中添加应用程序相关的功能。空闲任务钩子函数会被空闲任务每循环一次就自动调用一次。通常空闲任务钩子函数被用于:
执行低优先级,后台或需要不停处理的功能代码。
测试处系统处理裕量(空闲任务只会在所有其它任务都不运行时才有机会执行,所 以测量出空闲任务占用的处理时间就可以清楚的知道系统有多少富余的处理时 间)。
将处理器配置到低功耗模式——提供一种自动省电方法,使得在没有任何应用功能 需要处理的时候,系统自动进入省电模式。
(9)空闲任务钩子函数的实现限制
空闲任务钩子函数必须遵从以下规则 1. 绝不能阻或挂起。空闲任务只会在其它任务都不运行时才会被执行(除非有应用任 务共享空闲任务优先级)。以任何方式阻塞空闲任务都可能导致没有任务能够进入 运行态! 2. 如果应用程序用到了vTaskDelete() AP函数,则空闲钩子函数必须能够尽快返回。因为在任务被删除后,空闲任务负责回收内核资源。如果空闲任务一直运行在钩 子函数中,则无法进行回收工作。
void vApplicationIdleHook(void)
(10)改变任务优先级
void vTaskPrioritySet( TaskHandle_t xTask, UBaseType_t uxNewPriority ) PRIVILEGED_
FUNCTION;
API函数 vTaskPriofitySet()可以用于在调度器启动后改变任何任务的优先级。
uxTaskPriorityGet() API 函数uxTaskPriorityGet() API 函数用于查询一个任务的优先级。
(11)删除任务
void vTaskDelete( TaskHandle_t xTaskToDelete ) PRIVILEGED_FUNCTION;
任务可以使用API函数vTaskDelete()删除自己或其它任务。任务被删除后就不复存在,也不会再进入运行态。空闲任务的责任是要将分配给已删除任务的内存释放掉。因此有一点很重要,那就是使用vTaskDelete() API 函数的任务千万不能把空闲任务的执行时间饿死。需要说明一点,只有内核为任务分配的内存空间才会在任务被删除后自动回收。任务自己占用的内存或资源需要由应用程序自己显式地释放。















 5709
5709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









