







随着机器人技术的迅速发展,履带机器人作为一种特殊的移动机器人,因其独特的移动方式和广泛的应用场景而备受关注。本文将对履带机器人的起源与发展、底盘结构、性能特点、机构特点、应用场景、运动机制、技术挑战以及未来发展等方面进行详细的阐述。
履带机器人的起源与发展
履带机器人最早起源于军事领域,用于复杂地形下的侦察和作战任务。随着技术的不断进步,履带机器人逐渐扩展到民用领域,如救援、勘探、农业等。近年来,随着人工智能和自主导航技术的快速发展,履带机器人的智能化水平不断提高,功能也日益丰富。
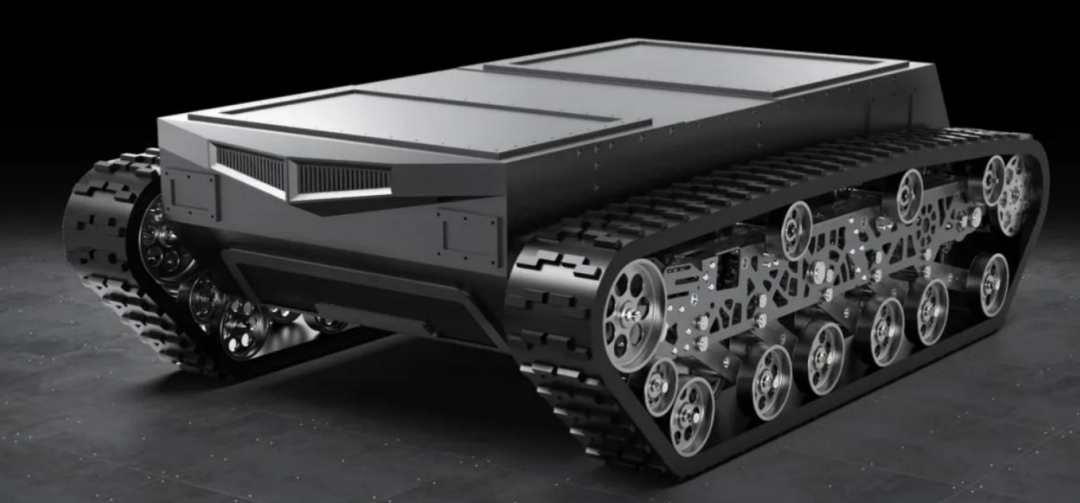
底盘结构
履带机器人的底盘结构主要由履带、驱动轮、悬挂系统、传动系统等组成。履带采用橡胶或金属材质,具有良好的抓地力和越障能力。驱动轮通过传动系统驱动履带运动,实现机器人的前进、后退、转向等动作。悬挂系统则用于保证机器人在复杂地形下的稳定性和舒适性。
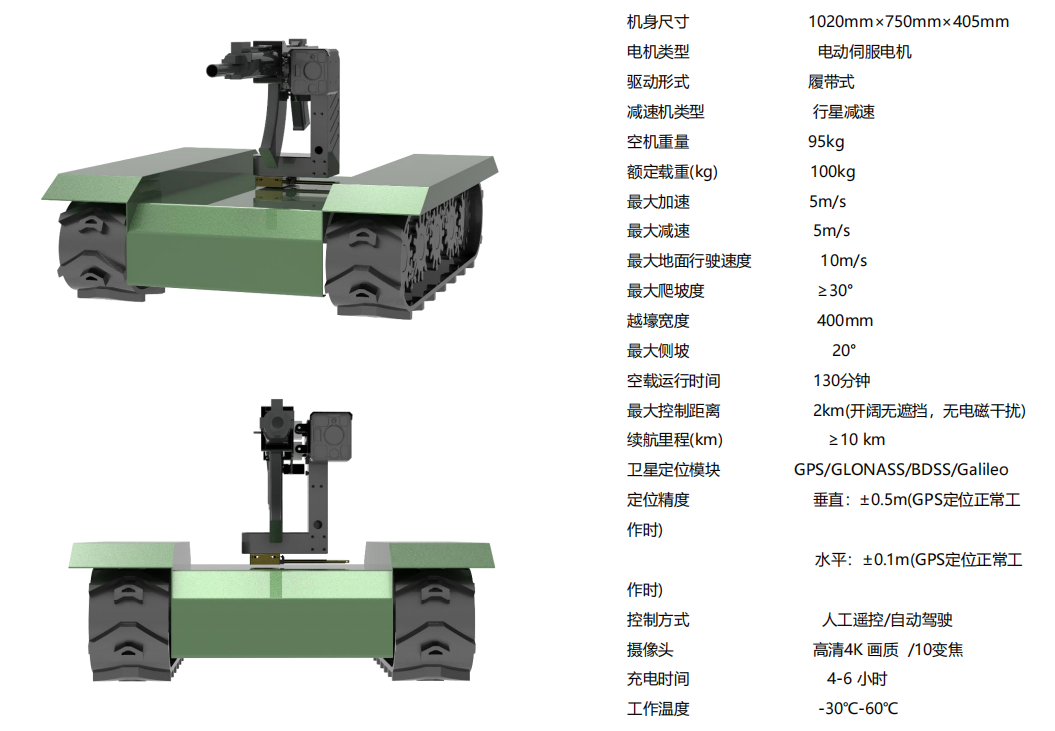
性能特点
履带机器人具有以下性能特点:
1. 越野能力强:履带设计使得机器人能够在沙地、泥泞、山地等复杂地形下稳定行驶。
2. 承载能力强:履带机器人的底盘结构能够承受较大的载荷,适用于重载作业。
3. 稳定性好:悬挂系统能够有效减少地形对机器人的冲击,保证机器人的稳定性。
4. 操控灵活:通过先进的控制系统,可以实现机器人的精确操控和自主导航。
机构特点
履带机器人的机构特点主要体现在以下几个方面:
1. 模块化设计:履带机器人的各个部件采用模块化设计,便于维修和更换。
2. 可扩展性强:通过增加功能模块,可以实现履带机器人的多功能化。
3. 智能化程度高:采用先进的传感器和控制系统,使得机器人具备较高的智能化水平。
应用场景
履带机器人的应用场景十分广泛,包括但不限于以下几个方面:
1. 军事领域:用于侦察、作战、运输等任务。
2. 救援领域:在地震、火灾等灾害现场进行搜救和救援工作。
3. 勘探领域:在恶劣环境下进行地质勘探和资源开发。
4. 农业领域:用于播种、施肥、除草等作业。
运动机制
履带机器人的运动机制主要包括以下几个方面:
1. 履带驱动:通过驱动轮驱动履带运动,实现机器人的前进、后退和转向。
2. 悬挂系统:通过悬挂系统保证机器人在复杂地形下的稳定性和舒适性。
3. 自主导航:采用先进的导航算法和传感器,实现机器人的自主导航和定位。
技术挑战
履带机器人在发展过程中面临以下技术挑战:
1. 复杂地形下的稳定性问题:如何在复杂地形下保持机器人的稳定性是一个重要的技术难题。
2. 能源供应问题:如何为履带机器人提供持久稳定的能源供应是一个亟待解决的问题。
3. 智能化水平提升:如何提高履带机器人的智能化水平,使其具备更强的自主决策和学习能力是一个重要的研究方向。
未来发展
未来,履带机器人将在以下几个方面得到进一步的发展:
1. 智能化水平提升:随着人工智能技术的不断进步,履带机器人的智能化水平将进一步提高,实现更高效的自主作业和决策。
2. 多功能化:通过增加功能模块,实现履带机器人的多功能化,满足不同领域的需求。
3. 环保节能:采用更环保的能源和节能技术,降低履带机器人的能耗和排放。
4. 安全性提升:通过改进设计和加强安全措施,提高履带机器人在复杂环境下的安全性和可靠性。


















 447
447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











