






两轮独立驱动电动汽车控制策略。
分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层基本模型预测控制计算附加扭矩,下层进行最优分配。
(工程项目线上支持)
路径跟踪,力矩分配,高低速双策略。
carsim和Simulink联合仿真,包含建模说明书。
ID:72150653259325585
Wish守
两轮独立驱动电动汽车控制策略
随着电动汽车技术的发展,独立驱动轮电动汽车成为了汽车领域的一个热门话题。这种新型电动汽车不仅在动力和操控性能上有所提升,还能通过优化分配驱动力矩,在低速和高速行驶中实现更好的控制效果。本文将从低速和高速两种策略出发,对独立驱动电动汽车控制策略进行优化,并使用阿克曼转向的差速控制和上下两层控制器来实现驱动力矩的分配。
在低速情况下,阿克曼转向是一种常用的转向机构,在这种情况下,独立驱动电动汽车可以通过差速控制来实现转向。差速控制通过在两个独立驱动轮之间分配不同的驱动力矩,来使车辆实现转向。通过对阿克曼转向原理的研究和分析,可以确定不同转向角度下的驱动力矩分配策略,以实现更加精准的低速转向效果。
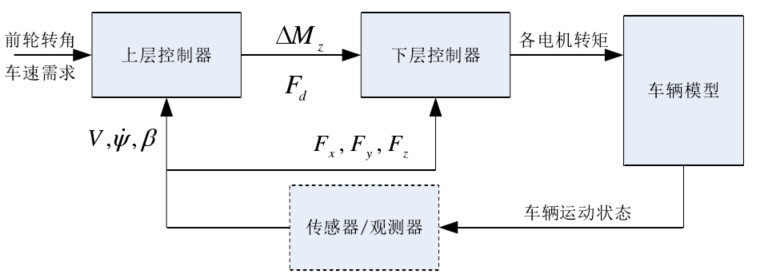
而在高速情况下,独立驱动电动汽车需要更加复杂的控制策略来实现优化的驱动力矩分配。上层控制器基于基本模型预测控制的思想,通过计算附加扭矩来实现高速驱动力矩的控制。基于模型预测控制的方法可以根据车辆的动态特性和行驶状况,预测未来一段时间内的车辆状态,并据此计算出合理的驱动力矩分配策略。这种基于模型预测控制的方法能够更好地适应不同的行驶条件,提高车辆的操控性能和稳定性。
下层控制器则负责具体的驱动力矩分配计算。通过对电动汽车的动力学建模和最优分配算法的研究,可以确定在不同驾驶情况下,各个轮子所需的驱动力矩。这种分层控制策略可以提高控制的效率和精确度,使车辆能够更好地适应各种行驶条件和操控需求。
为了验证以上所述的控制策略的有效性和可行性,本文采用了carsim和Simulink联合仿真的方法,并提供了相应的建模说明书。通过在仿真环境中对独立驱动电动汽车的控制策略进行验证和优化,可以得出结论,该控制策略能够在实际行驶中实现预期的效果,并具备一定的工程应用前景。
综上所述,本文围绕两轮独立驱动电动汽车控制策略展开了详细的分析和阐述。通过优化分配驱动力矩,在低速和高速行驶中实现更好的控制效果。阿克曼转向的差速控制和基于模型预测控制的上下两层控制器,为独立驱动电动汽车的操控性能提供了新的思路和方法。通过carsim和Simulink联合仿真的验证,进一步证明了该控制策略的有效性和可行性,具备一定的工程应用前景。
相关的代码,程序地址如下:http://coupd.cn/653259325585.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









