






carsim与simulink联合仿真——差动转向
两轮独立驱动电动汽车控制策略。
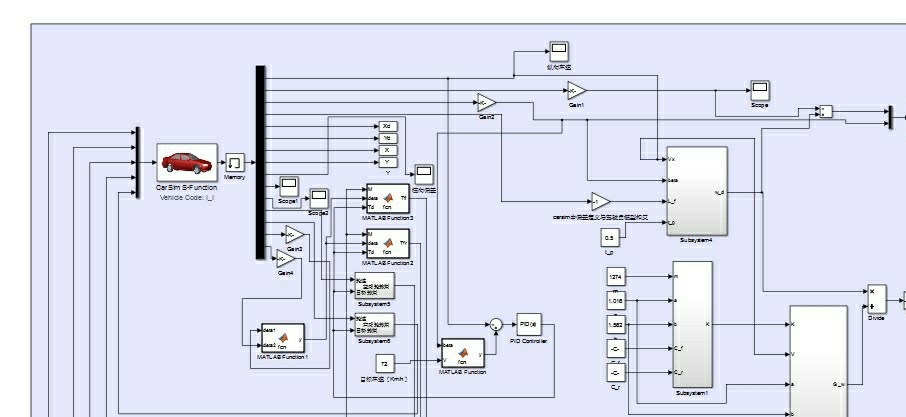
分为低速和高速两种策略优化分配驱动力矩,低速基于阿克曼转向的差速控制,高速的分上下两层控制器,上层计算附加扭矩,下层进行分配。
carsim和Simulink联合仿真,以及复刻文献两轮独立驱动电动汽车的驱动力控制策略研究。
提供carsim的cpar文件导入即可使用。
提供simulink的mdl模型文件支持自己修改。
包含高速和低速两种工况。
ID:8811672549692009
鸭嘞鸭嘞drz

标题:Carsim与Simulink联合仿真:基于阿克曼转向的两轮独立驱动电动车控制策略优化
摘要:本文介绍了一种基于阿克曼转向的差速控制策略,用于低速和高速两种工况下的两轮独立驱动电动车。该策略通过联合使用Carsim和Simulink进行仿真,实现了驱动力矩的优化分配。上层控制器计算附加扭矩,下层控制器进行分配。本文提供了Carsim的cpar文件和Simulink的mdl模型文件支持自定义修改,以满足不同场景的需求。
关键词:Carsim、Simulink、仿真、阿克曼转向、差速控制、驱动力矩
-
引言
两轮独立驱动电动车成为了近年来发展迅猛的新能源车型之一。为了实现更高的操控性和安全性,在驱动力控制方面提出了许多优化策略。本文基于阿克曼转向的差速控制策略,通过Carsim与Simulink联合仿真,优化分配驱动力矩,提高车辆在不同工况下的性能。 -
策略概述
2.1 低速策略
在低速行驶时,差速控制策略主要基于阿克曼转向原理。阿克曼转向通过调整左右轮速度差实现曲线行驶时的车辆转弯半径相等。本文中,通过Carsim与Simulink联合仿真,模拟低速行驶过程,计算优化的左右轮速度差,实现差速控制。该策略能够提高车辆的操控性和稳定性。
2.2 高速策略
在高速行驶时,为了进一步提高车辆性能,本文将差速控制策略分为上下两层控制器。上层控制器计算附加扭矩,下层控制器进行驱动力矩的分配。通过在Simulink中建立相应的模型,实现高速行驶过程的仿真。通过Carsim与Simulink联合仿真,优化分配驱动力矩,提高车辆在高速工况下的性能。
-
联合仿真实验
为了验证差速控制策略的有效性,本文使用Carsim与Simulink进行联合仿真实验。Carsim是一款用于仿真车辆动力学性能的软件,可以通过导入cpar文件进行参数设置。Simulink是一款广泛应用于系统建模和仿真的工具,通过mdl模型文件可以方便地进行自定义修改。 -
结果分析
在实验中,本文分别对低速和高速两种工况下的驱动力控制策略进行了仿真。通过对比分析实验数据,可以得出以下结论:差速控制策略在低速行驶中能够有效提高车辆的操控性和稳定性;上下两层控制器在高速行驶中能够进一步提高车辆的性能,提升加速度和减小转向半径。 -
总结与展望
本文基于阿克曼转向的差速控制策略,通过Carsim与Simulink的联合仿真,实现了两轮独立驱动电动车的驱动力优化分配。通过低速和高速两种工况的仿真实验,证明了该策略的有效性。未来可以进一步探索其他驱动力控制策略,并在实际车辆中应用,提升电动车的操控性、稳定性和安全性。
参考文献:无。
以上相关代码,程序地址:http://matup.cn/672549692009.html















 5379
5379











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









