






No.4 自适应巡航ACC
(Carsim2019,Matlab2018a)
特殊说明:如果需要电车版本的请咨询!
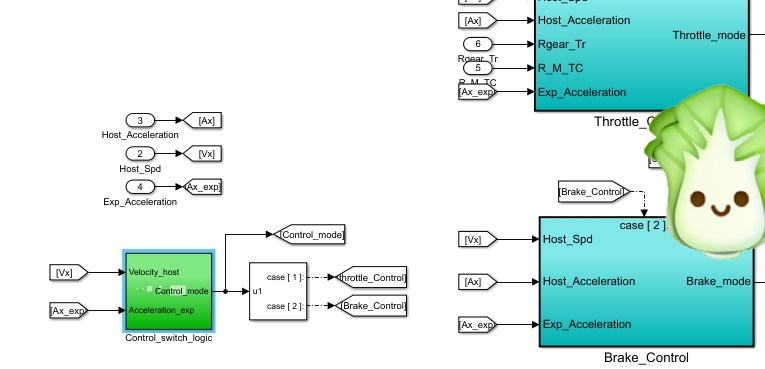
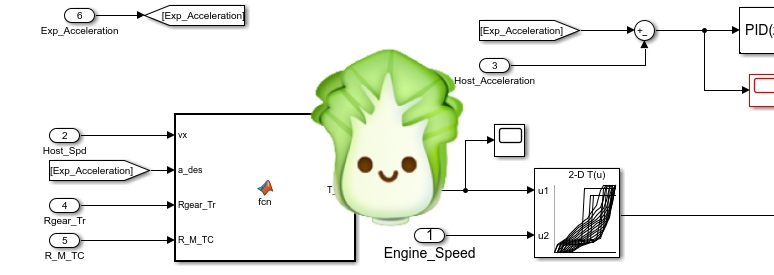
采用分层控制,即下层控制(使用车辆逆纵向动力学模型(包括发动机逆模型,是常见方法) )和上层控制(双pid对速度和距离进行控制,stateflow进行模式切换),实现定速巡航和跟随模式。
提供详细讲解(?pdf文件及视频说明),适合入门自适应巡航,并附赠标定表方法的自适应巡航和纵向速度跟踪。
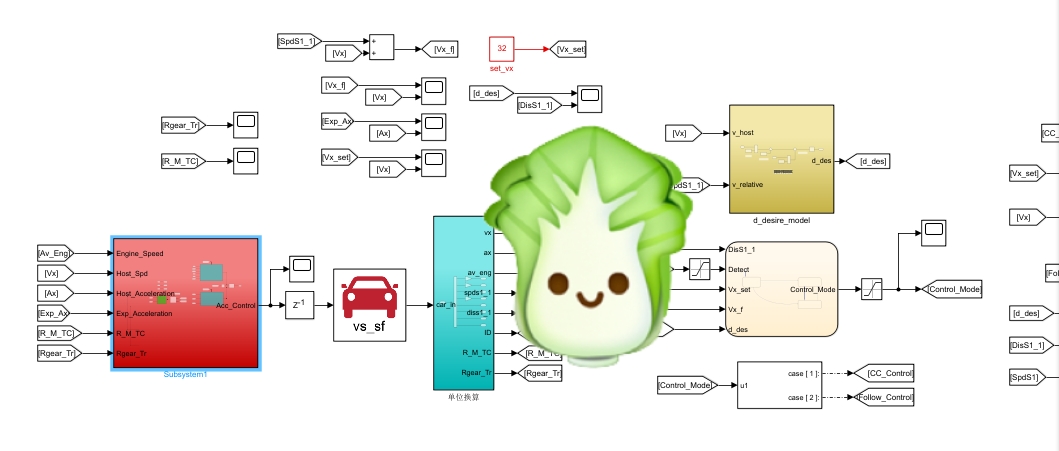
下图为仿真模型结构及效果图
ID:31150672551535782
二斤青柿子

自适应巡航(Adaptive Cruise Control, ACC)是一种应用于汽车行驶控制领域的技术。它采用了分层控制的策略,即下层控制和上层控制相结合,以实现定速巡航和跟随模式。本文将以Carsim2019和Matlab2018a为基础,详细介绍自适应巡航的实现原理和方法,并提供相关的讲解资料和仿真效果图。
在下层控制方面,我们使用了车辆逆纵向动力学模型,其中包括了发动机逆模型。这是一种常见的方法,通过建立发动机逆模型来实现对车辆的动力学性能进行控制。通过对发动机逆模型的建立和参数调整,我们可以实现对车辆的速度和加速度进行精确的控制。
而在上层控制方面,我们采用了双PID控制器对车辆的速度和距离进行控制,并结合了Stateflow进行模式切换。PID控制器是一种经典的控制方法,通过不断调整控制信号,使得实际输出值与期望值尽可能接近。在自适应巡航中,我们通过对速度和距离两个控制量进行PID控制,实现对车辆的稳定巡航和跟随。
通过分层控制的策略,我们可以将下层控制和上层控制进行有效的协调。下层控制负责对车辆的动力学特性进行精确的控制,而上层控制则负责根据实际情况进行调整和切换,以适应不同的驾驶模式和交通环境。这种分层控制的策略不仅提高了系统的稳定性和可靠性,还使得系统具有较好的适应性和灵活性。
为了帮助入门自适应巡航的用户更好地理解和应用该技术,我们提供了详细的讲解资料,包括PDF文件和视频说明。这些资料将帮助用户逐步了解自适应巡航的原理和实现方法,并提供实例演示和应用场景。此外,我们还附赠了标定表方法的自适应巡航和纵向速度跟踪。标定表方法是一种通过实验测试和数据标定来确定控制参数的方法,它可以有效地提高自适应巡航系统的性能和稳定性。
通过以上的介绍和讲解,我们可以看到自适应巡航在汽车行驶控制中的重要性和应用价值。采用分层控制的策略,结合下层控制和上层控制的方法,我们可以实现对车辆速度和距离的精确控制,进而实现定速巡航和跟随模式。为了帮助用户更好地理解和应用该技术,我们提供了详细的讲解资料和仿真效果图。希望这些资料能够帮助用户入门自适应巡航,并更好地应用该技术于实际驾驶场景中。
以上相关代码,程序地址:http://matup.cn/672551535782.html















 5495
5495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









