FANUC机器人用户自定义报警的具体配置方法详解
最新推荐文章于 2024-11-05 15:26:37 发布

 620
3113
507
8610
620
3113
507
8610

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
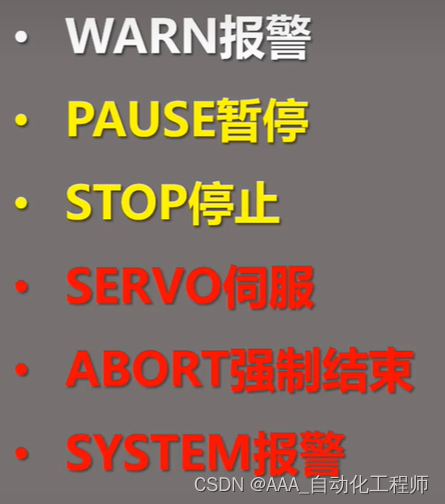
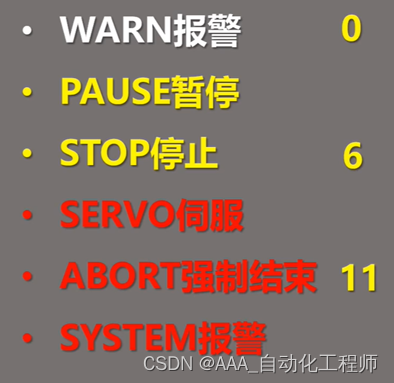
 本文详细介绍了FANUC机器人用户自定义报警的配置方法,包括报警等级的区分,如何设置系统变量调整报警级别,以及在程序中通过UALM指令调用和使用用户报警。用户可以通过设置$UALMRM_SEV变量定义报警等级,并在MENU—设置—用户报警中进行详细设置。同时,文章强调了用户报警必须与其他指令如IF语句配合使用,且连续报警时只会执行第一条。
本文详细介绍了FANUC机器人用户自定义报警的配置方法,包括报警等级的区分,如何设置系统变量调整报警级别,以及在程序中通过UALM指令调用和使用用户报警。用户可以通过设置$UALMRM_SEV变量定义报警等级,并在MENU—设置—用户报警中进行详细设置。同时,文章强调了用户报警必须与其他指令如IF语句配合使用,且连续报警时只会执行第一条。



 订阅专栏 解锁全文
订阅专栏 解锁全文


























