FANUC机器人建立坐标系的具体方法和步骤(用户+工具)
最新推荐文章于 2024-12-07 17:09:31 发布

 1万+
1522
1479
2289
1万+
1522
1479
2289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
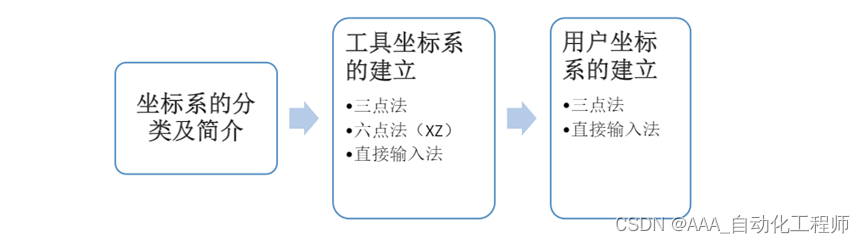
 本文详细介绍了FANUC机器人如何通过六点法建立用户和工具坐标系,包括坐标系分类简介及具体的操作步骤,旨在帮助用户理解并实践坐标系的设定过程。
本文详细介绍了FANUC机器人如何通过六点法建立用户和工具坐标系,包括坐标系分类简介及具体的操作步骤,旨在帮助用户理解并实践坐标系的设定过程。


 订阅专栏 解锁全文
订阅专栏 解锁全文


























