







 探讨在FANUC机器人仿真软件Roboguide中,用户坐标系直接输入法中的W、P、R参数理解问题。疑惑在于改变W时并非如手册所述绕世界坐标系X轴旋转,而是绕用户坐标系X轴旋转。
探讨在FANUC机器人仿真软件Roboguide中,用户坐标系直接输入法中的W、P、R参数理解问题。疑惑在于改变W时并非如手册所述绕世界坐标系X轴旋转,而是绕用户坐标系X轴旋转。
FANUC机器人
FANUC机器人用户坐标系问题
在使用FANUC机器人的仿真软件Roboguide时,对于用户坐标系直接输入法中的W、P、R的有一些疑问。
按照手册上面的说法,W、P、R是绕着世界坐标系的X、Y、Z三个方向进行旋转的,但是在使用过程中发现改变W时并不是绕着世界坐标系的X方向进行旋转的,是绕着这个用户坐标系的X轴方向进行旋转的。
手册中关于用户坐标系W、P、R的解释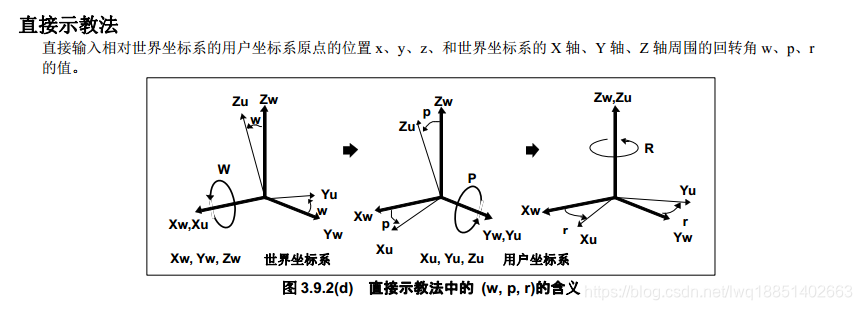
1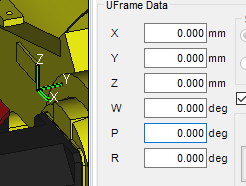 2
2 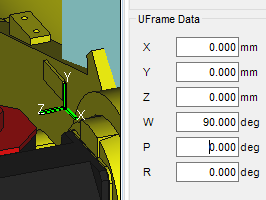
3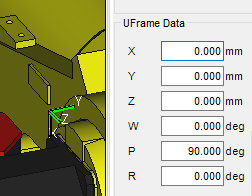 4
4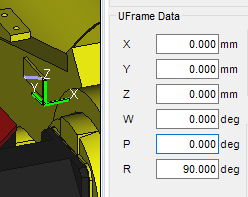
5 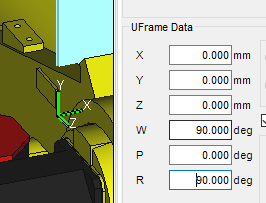
上面的图片1和4和5作对比就能看出来
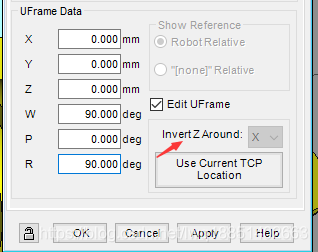
这个红色箭头指向的这里是什么意思还不知道

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









